

Работа № 6. Симплекс-метод линейного программирования
Задание
Ознакомиться с постановкой задачи оптимизации для линейных функций и теоретической основой методов линейного программирования.
Построить алгоритм и программу реализации симплекс-метода в Mathcad и решить задачу оптимизации для контрольного примера.
Произвести расчет задачи линейного программирования для целевой функции и ограничений, согласно варианту задания.
Дать геометрическую интерпретацию задачи линейного программирования, согласно варианту задания в 3D и 2D графике Mathcad.
Методические указания.
1. Постановка задачи линейного программирования и теоретическая основа методов линейного программирования приведены в разделе 3, тема 4.
2. Приведенный далее машинный алгоритм симплекс-метода детализирует операции метода и адаптирует их к специфике Mathcad. Он заключается в следующем:
1) Решая совместно любую произвольную пару уравнений для ограничений, записанных в канонической форме, находим некоторую (начальную) вершину многогранника допустимых решений (начальное допустимое базисное решение).
2) В этой вершине вычисляем значение целевой функции.
3) Находим смежную вершину многогранника, решая другую пару уравнений, одно из которых содержалось в первой паре, см. п.1).
4) Вычисляем в ней значение целевой функции.
5) Значения целевой функции в найденных вершинах сравниваем, и в качестве нового допустимого базисного решения принимаем вершину с меньшим значением целевой функции.
6) Процедура п.п. 1–5 проделывается для всех смежных вершин, вновь пока не случится, что все вершины смежные с базисной будут иметь большее значение целевой функции. Эта вершина и принимается за оптимальное решение.
Ввиду конечности вершин многогранника (следствие конечности ограничений задачи ЛП) за конечное число шагов мы найдем искомую точку минимума.
Надо заметить, что в задаче минимизации при переходе от одной вершины к другой значение целевой функции убывает.
Согласно приведенному алгоритму нужно составить программу в Mathcad и отладить ее на примере следующей задачи. Текст программы, а также отладочный пример решения оптимизационной задачи приведен на рис. 35.
Ввести программу и отладить ее на примере следующей задачи линейного программирования канонического вида. Пусть заданы:
Целевая функция задана F(x) = 10 + 2px1 + qx2 ,
Критерий оптимизации F(x*) = min F(x) ,
О граничения
x1
- 5p
x2
= 1
граничения
x1
- 5p
x2
= 1
x1 + q x2 = 7
x1 + p x2 = 2
x1 – 3q x2 = 4
xi ≥ 0, i =1,…,4
Требуется найти координаты точки x*, в которой F(x) имеет минимум.
Согласно алгоритму симплекс-метода, составляем пары ограничений с первым уравнением, записываем в матричной форме и, решая их совместно как систему уравнений, находим базисное решение. Вычисляем значения целевой функции F(x) в базисной точке. Находим minF(x) с помощью встроенной процедуры Mathcad. Получаем новое базисное решение. Процедуру реализуем в цикле (см. раздел «Инструкция по работе в Mathcad»).

Рис. 35. Текст программы для решения задачи ЛП симплекс-методом, пример расчета и геометрическая интерпретация.
На рис. 35 приведены результаты решения оптимизационной задачи отладочного примера – координаты точки минимума х*(x1,x2.) и значение целевой функции F* = F(x*).
3. Для решения задачи повариантно значения параметров p и q принимаются в соответствии с номером фамилии студента в списке группы.
Значения параметров заданий по вариантам приведены в табл. 6.
Таблица 6. Параметры по вариантам заданий.
№ вар |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
p |
0,5 |
0,4 |
0,3 |
0,3 |
0,2 |
0,1 |
0,1 |
0,1 |
0,1 |
0,6 |
0,1 |
0,8 |
0,9 |
0,4 |
0,6 |
q |
0,3 |
0,2 |
0,1 |
0,5 |
0,1 |
0,4 |
0,5 |
0,4 |
0,3 |
0,1 |
0,4 |
0,3 |
0,5 |
0,3 |
0,4 |
4. Для построения геометрической интерпретации необходимо для каждой функции ограничений ввести новые идентификаторы x1(x), x2(x), x3(x), x4(x). Вызов встроенных процедур 3D и 2D графиков в MathCad производится согласно инструкции по работе в MathCad (см. раздел 4). Геометрическая интерпретация задачи линейного программирования для отладочного примера в графике MathCad приведена на рис 33. Построены целевая функция в 3D-графике и область допустимых значений параметра оптимизации в 2D.
Работа № 7. Многомерные методы оптимизации
Задание
1. Ознакомиться с методами многомерной оптимизации: методом Хука-Дживса, методом покоординатного спуска, методом наискорейшего спуска и методом градиента.
2. Составить программу расчета для одного из методов, согласно варианту задания, по двум параметрам для задачи без ограничения и отладить ее на контрольном примере.
3. Решить задачу оптимизации для целевой функции и параметров, согласно данным варианта.
Методические указания
1. Постановка задачи нелинейного программирования и многомерные методы приведены в разделе 3, тема 5. В данной работе многомерная оптимизация рассматривается на примере двухпараметрической задачи. В качестве методов использованы, в зависимости от варианта, метод Хука-Дживса и метод покоординатного спуска, которые относятся к методам нулевого порядка.
Алгоритм любого из методов поисковой многомерной оптимизации состоит из двух этапов:
1) Определение направления движения в пространстве параметров на текущем шаге.
2) Движение вдоль выбранного направления одним из методов одномерной оптимизации.
На первом этапе в обоих из названных методов направление выбирается вдоль координаты.
На втором – в задаче без ограничений – целесообразно использовать одномерный метод равномерного поиска, как в методе Хука-Дживса, так и в методе покоординатного спуска (см. работа №1), который рекомендуется модифицировать, введя переменный шаг (при удачном продвижении величина шага удваивается, при неудачном – делится пополам).
Процесс оптимизации завершается, когда удовлетворяется заданная точность одновременно по обеим координатам.
2. При составлении программы многомерного метода рекомендуется воспользоваться готовой программой одномерного метода равномерного поиска, использованной в работе №1. Эта программа выполняет роль внутренней процедуры и дополняется модулем чередования координат, из которого к ней производится обращение.
В качестве параметров оптимизации принимаются переменные х и у, область допустимых значений параметров определена границами (Ах,Вх и Ау,Ву), точность по каждому параметру соответственно Ех и Еу. Выражение целевой функции записывается в виде: Z(x,y)=F(x) +H(y).
Для определения координат текущей точки в области параметров оптимизации рекомендуется использовать двумерные массивы Mathcad.
Текст программы формирования целевой функции Z(x,y), а также ее геометрическая интерпретация для отладочного примера в 3D и 2D графиках приведен на рис. 36. Вызов процедур в MathCad производится согласно инструкции по работе в MathCad (см. раздел 4).
Программа двумерной оптимизации методом покоординатного спуска в MathCad и результаты оптимизационного расчета для отладочного примера приведены на рис. 37. Использованы вспомогательные машинные переменные для аргумента t и целевой функции Р(Х,Y), а также рабочие ячейки G и H. Одномерный метод равномерного поиска оформлен в виде процедуры и обозначен в программе L(P, a, e), где параметры P, a, e формальные параметры процедуры которым при обращении присваиваются фактические значения. Результаты расчетов: координаты точки минимума обозначены идентификаторами (Xm,Ym), а значение целевой функции в этой точке − Z(Xm,Ym).

Рис.36. Программа построения целевой функции от двух параметров в Mathcad.

Рис. 37. Программа двумерной оптимизации в MathCad.
3. При выполнении оптимизации согласно варианту для целевой функции и параметров, используются данные, представленные в табл. 7. Варианты заданий, как по методу, так и по компонентам F(x) и H(y) целевой функции Z(x,y), а также интервалам по координатам х и у отражены сочетанием номеров строк табл. 7. Компоненты целевой функции F(x) и H(y), значения границ интервалов – (Ах,Вх) и (Ау,Ву), а также значения точностей Ех и Еу по каждой из кооринат – х и у берутся из графы «номер функции» табл.7. В качестве стартовой принимается точка С(Ах,Ау) на границе области допустимых значений параметров оптимизации (Ах,Вх и Ау,Ву).
Таблица 7. Варианты заданий.
№ варианта |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|||
Метод |
Хука-Дживса |
Поокординатного спуска |
|||||||||
Номер F(x) |
1 |
2 |
3 |
4 |
5 |
6 |
5 |
4 |
|||
Номер H(y) |
2 |
3 |
4 |
5 |
6 |
1 |
2 |
3 |
|||
Номер функции |
Целевая функция Z(x,y) =F(x) + H(y) |
Интервал (а,b) |
Точность e |
||||||||
1 |
4 – 0,1х + cos(x) |
0 – 5,0 |
0,1 |
||||||||
2 |
х² + 1/х |
0,1 – 2,0 |
0,01 |
||||||||
3 |
tg(x) + 1/х |
0,1 – 1,5 |
0,001 |
||||||||
4 |
exp(x) + 1/х |
0,1 – 1,0 |
0,01 |
||||||||
5 |
tg(x) – ln(x) |
0,1 – 1,0 |
0,001 |
||||||||
6 |
3۰exp(–x) + sin(x) |
0 – 8,0 |
0,1 |
||||||||
В программе двумерной оптимизации по методу Хука-Дживса используется дополнительный цикл, который обеспечивает чередование смены направлений движения к точке минимума на каждом цикле расчета.
Работа № 8. Многомерная оптимизация при ограничениях
Задание
1. Ознакомиться с методами многомерной оптимизации при ограничениях: методом движения вдоль границ, отражения от границ.
2. Составить программу расчета для одного из методов, согласно варианту задания по двум параметрам для задачи с ограничениями и отладить ее на контрольном примере.
3. Решить задачу оптимизации с ограничениями для целевой функции и параметров согласно данным варианта.
Методические указания
1. Постановка задачи многомерной оптимизации при ограничениях проведена в разделе 3, тема 5. Описание методов оптимизации при ограничениях: метода движения вдоль границ, отражения от границ, метода штрафных функций − приведены в разделе 3, тема 6. В данной работе многомерная оптимизация рассматривается на примере двухпараметрической задачи. В качестве методов использованы, в зависимости от варианта, метод Хука-Дживса или метод покоординатного спуска.
Алгоритмы методов многомерной оптимизации при ограничениях (метода движения вдоль границ, отражения от границ) состоят из двух этапов:
- движение в пространстве параметров оптимизации к минимальному значению целевой функции, где ограничения выполняются;
- движение в пространстве параметров оптимизации, когда ограничения нарушены.
На первом используется один из методов, описанных в разделе 4, тема5, например, метод Хука-Дживса или метод покоординатного спуска.
На втором – один из методов оптимизации с ограничениями – это метод движения вдоль границ или отражения от границ, когда движение происходит вдоль границы в направлении убывания целевой функции. Если целевая функция начинает возрастать, то переходят к этапу один. Процесс повторяется, пока не будет найден минимум.
Программа многомерной оптимизации при ограничениях объединяет согласно алгоритму (см. п. 1) две программы: программу расчета области допустимых значений параметров и программу оптимизации без ограничений, использованную в предыдущей работе №7. Начнем с первой. Программа расчета области допустимых значений параметров, заданной ограничениями, двумерной задачи приведена на рис. 38.

Рис.38. Область допустимых значений параметров оптимизации и целевая функция двумерной задачи оптимизации.
Целевая функция Z(X,Y), как и в предыдущей работе №7, задана в виде двух слагаемых:
Z(X,Y) = F(X) + H(Y) (8.1)
Для отладочного примера ограничения заданы эллипсом и линейной функцией. Эллипс задан в тригонометрической форме уравнениями:
x2(t) = A cos(t)+xc, (8.2)
y2(t) = B cos(t)+y.
Заметим, что функция, описывающая эллипс, неоднозначная, поэтому для ее отображения в виде графика приходится применять вспомогательные функции Р1 и Р2, которые изображают выпуклый и вогнутый участки эллипса соответственно.
Прямая, отсекающая часть эллипса, описывается уравнением:
u(t) = kt + b1 (8.3)
В рассмотренном на рис. 38 примере коэффициент наклона прямой принят k=0.
Там же приведены графики области допустимых значений параметров оптимизации в формате 2D и график целевой функции в 3D.
Программа расчета точки экстремума приведена на рис.39. Выражение целевой функции записывается в виде (8.1). В качестве параметров оптимизации принимаются переменные х и у. В отладочном примере область допустимых значений определена границами (Ах,Вх и Ау,Ву), которые находятся из уравнений для ограничений. Точность определения минимума задается по каждому параметру Ех и Еу.
В задачах с ограничениями более эффективно использовать одномерные методы деления отрезка пополам либо «золотого сечения». Если ограничение задаются функциями (в отладочном примере):
Q1(x,y) = С, (8.4)
Q2(x,y)=A(x-a)2 + (y-b)2,
где А, a, в, С - коэффициенты, которые выбираются согласно варианту (таблица 7), то область допустимых значений параметров оптимизации (Ах,Вх и Ау,Ву) может быть определена путем совместного решения уравнений (8.4) как системы. Эти решения дадут границы интервала поиска решения по каждой координате x и y соответственно (Ах,Вх) и (Ах,Вх).
Приведенная на рис. 39 программа написана для метода покоординатного спуска, в котором для движения вдоль координаты использована программа одномерного метода деления отрезка пополам (см. Работа 1), оформленная в виде процедуры.
3. При выполнении оптимизации для функции и параметров согласно варианту, используются данные, представленные в табл. 9. Варианты заданий, как по методу, так и по компонентам целевой функции F(x) и H(y), а также интервалу по координатам х и у отражены сочетанием номеров строк табл. 8, как и в работе №7.
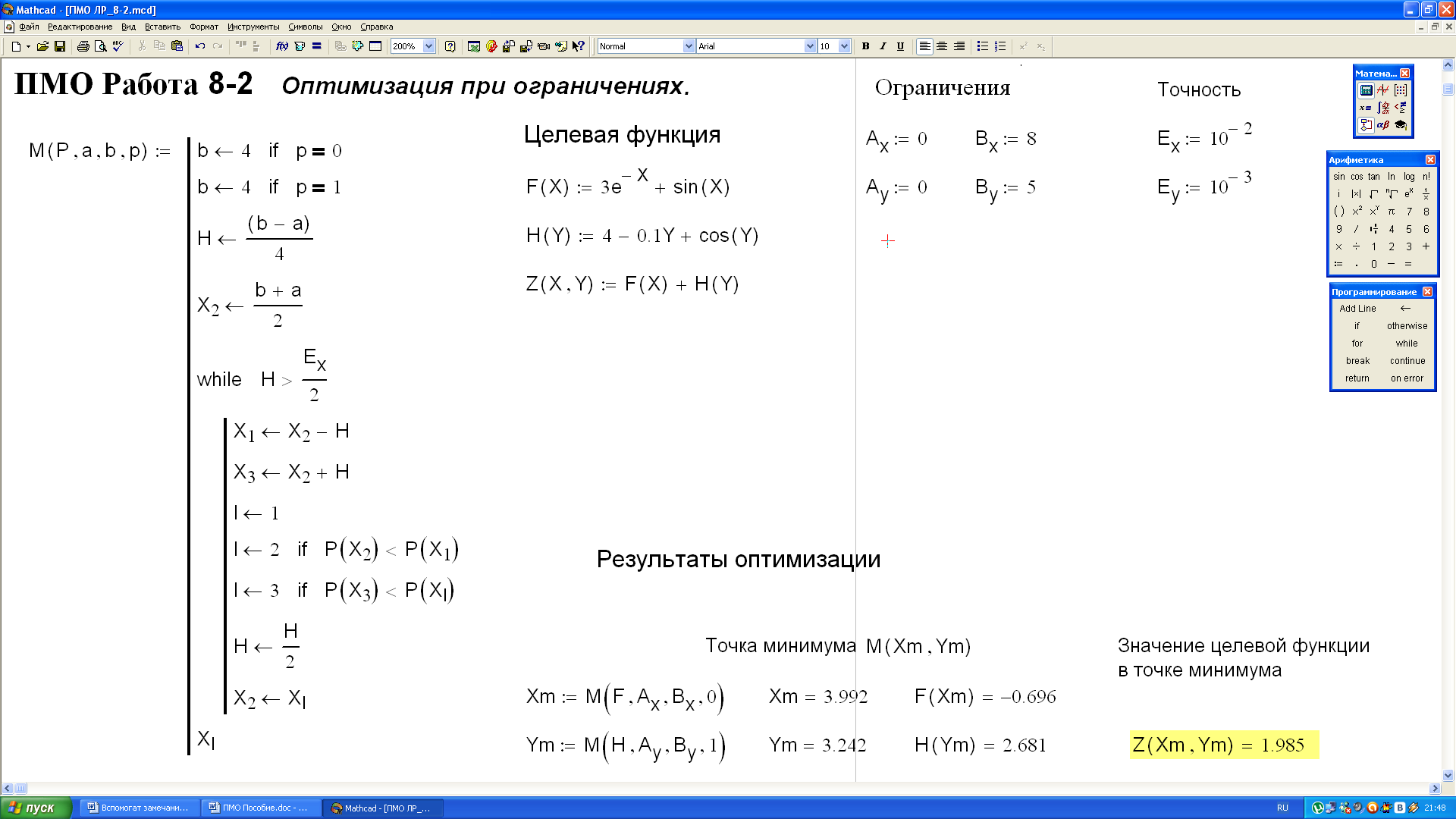
Рис. 39. Программа метода покоординатного спуска и пример оптимизации при ограничениях.
Таблица 9. Варианты параметров для ограничений.

В качестве программ одномерной оптимизации методами деления отрезка пополам и «золотого сечения» рекомендуется использовать программы из работ №2 и №3 соответственно, оформив их как процедуры. Выбор метода в зависимости от варианта таков: четные номера вариантов соответствуют методу деления отрезка пополам, нечетные – методу «золотого сечения».
Задание рекомендуется выполнять в следующей последовательности:
Дополнить модуль выбора направления движения соответствующего многомерного метода п. 2 блоком отыскания границ интервала вдоль выбранного направления, решив совместно систему:
Q(x,y) = C, (8.5)
Y = k۰X + d.
В программе из работы 7 п. 2 рис. 36 заменить модуль одномерной оптимизации равномерного поиска на модуль метода деления отрезка пополам или метод «золотого сечения» в соответствии с вариантом.
3.3. Провести оптимизационный расчет для функции п. 2 с ограничением, согласно варианту табл. 8.2.