Приклад виконання завдання
Задача.
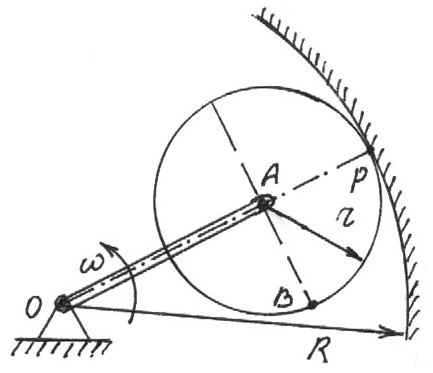
Знайти
швидкість точки В і прискорення точок
В і Р рухомої шестерні радіуса r=0,05 м.,
яка котиться в середині нерухомої
шестерні радіуса R=0,15 м. Шестерню радіуса
r
рухає
кривошип, який обертається навколо осі
О рівномірно з кутовою швидкістю
![]() =3
рад/с (рис. 2.4).
=3
рад/с (рис. 2.4).
Рис.
2.4.
Д ано:
ано:
R=0,15 м
r=0,05 м
=3 рад/с

![]() -?
-?
![]() -?
-?
![]() -?
-?
Розв’язання
1. Аналіз руху механізму. Досліджуючи рух механізму бачимо, що кривошип ОА, рівномірно обертаючись навколо осі О, рухає шестерню, яка в свою чергу обертається навколо пальця кривошипу А. Рухома шестерня котиться в середині нерухомої шестерні без ковзання. Отже, рух малої шестерні є плоскопаралельний, а рух кривошипа обертальний навколо нерухомої осі.
2. Визначення швидкості точки В. Положення миттєвого центра швидкостей малої шестерні Р відоме за умовою і тому її плоский рух в даний момент часу можна розглядати як обертальний навколо миттєвого центра швидкостей Р (рис.2.5).

Рис2.5
Отже за законами розподілу швидкостей відносно миттєвого центра швидкостей дістанемо:
![]()
Звідки
![]() (1)
(1)
Невідому швидкість точки А, можна знайти як швидкість точки кривошипа ОА:
![]() м/с.
м/с.
Вектор
![]() напрямлений
перпендикулярно до ОА, а вектор М
напрямлений
перпендикулярно до ОА, а вектор М
перпендикулярно до ВР (рис.2.5). Модуль вектора знаходимо за формулою (1):
![]()
3. Визначення прискорень точок В і Р. Плоский рух малої шестерні складається з поступального руху разом з полюсом, точкою А, і обертальною навколо осі, що проходить через полюс А. Прискорення точок В і Р визначимо за теоремою про додавання прискорень точки у плоскому русі:
![]()
![]() ,
,
де за модулем
![]() r;
r;
![]() r.
(2)
r.
(2)
Спочатку
визначимо прискорення полюса, точки А,
як точки кривошипа ОА. Кривошип ОА
обертається навколо осі О з сталою
кутовою швидкістю. Отже, його кутове
прискорення дорівнює нулю:![]() Прискорення точки А кривошипа визначаються
за формулою:
Прискорення точки А кривошипа визначаються
за формулою:
![]() де
за модулем
де
за модулем
![]()
![]() .
Отже, прискорення точки А дорівнює
.
Отже, прискорення точки А дорівнює
![]()
і напрямлене до центра обертання кривошипа О по радіусу ОА.
Визначимо
кутову швидкість
![]() і кутове прискорення
і кутове прискорення
![]() рухомої шестерні, необхідні для формул
(2).
рухомої шестерні, необхідні для формул
(2).
Миттєвий центр швидкостей знаходиться в точці Р, отже:
![]()
За
умовою задачі
![]() ,
тому, що
,
тому, що
![]() Таким чином ,згідно
(2)
модулі прискорень
Таким чином ,згідно
(2)
модулі прискорень
![]() і
і
![]() дорівнюють
дорівнюють
![]()
Вектори
![]() і
напрямлені по радіусах до центра А
рухомої шестерні (рис.2.5).
Вектори
і
і
напрямлені по радіусах до центра А
рухомої шестерні (рис.2.5).
Вектори
і
![]() дорівнюють нулю, згідно формули (2), тому,
що
дорівнюють нулю, згідно формули (2), тому,
що
![]()
Таким чином, прискорення точок В і Р знаходиться за формулами:
![]()
![]() (3)
(3)
Як
показано на рис.1.4, вектори прискорень
![]() і
взаємно перпендикулярні і тому, згідно
(3),
і
взаємно перпендикулярні і тому, згідно
(3),
![]()
а вектори прискорень і паралельні і тому, згідно (3),
![]()
Відповідь:
![]()
![]()
![]()
Таблиця 6
№ варианта |
Розміри, см |
wOA , рад/с |
w1 , рад/с |
eOA , рад/с2 |
VA , см/с |
аA , см/с2 |
||
ОА |
r |
AB |
||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
1 |
40 |
15 |
- |
2 |
- |
2 |
- |
- |
2 |
30 |
15 |
- |
3 |
- |
2 |
- |
- |
3 |
- |
50 |
- |
- |
- |
- |
50 |
100 |
4 |
35 |
- |
- |
4 |
- |
8 |
- |
- |
5 |
25 |
- |
- |
1 |
- |
1 |
- |
- |
6 |
40 |
15 |
- |
1 |
1 |
0 |
- |
- |
7 |
35 |
- |
75 |
5 |
- |
10 |
- |
- |
8 |
- |
- |
20 |
- |
- |
- |
40 |
20 |
9 |
- |
- |
45 |
- |
- |
- |
20 |
10 |
10 |
25 |
- |
80 |
1 |
- |
2 |
- |
- |
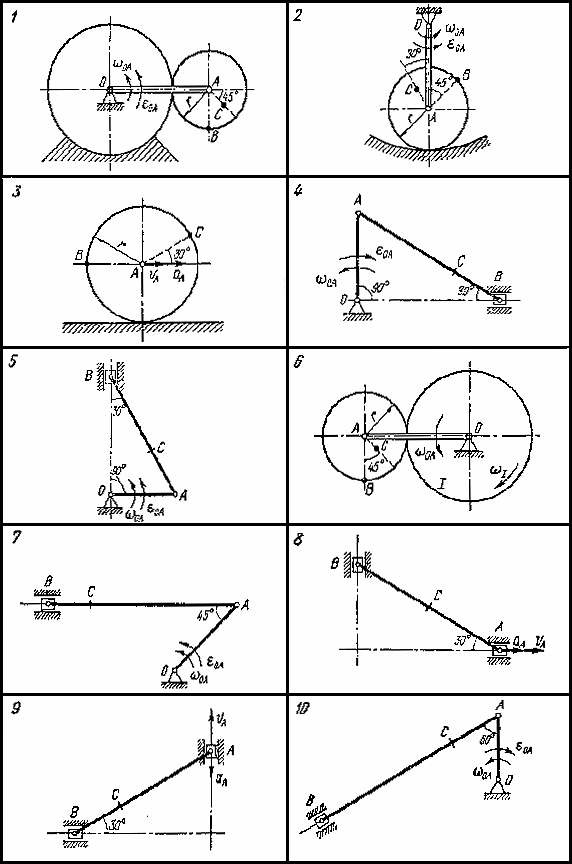
Рисунок 5