

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«Тюменский государственный нефтегазовый университет»
ИНСТИТУТ НЕФТИ И ГАЗА
Кафедра «Автоматизация и управление»
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
по дисциплине «АПП в бурении»
для выполнения лабораторной работы
для студентов направлений:
«Нефтяное бурение»
всех форм обучения
ЛАБОРТОРНАЯ РАБОТА № 5
«Исследование динамических характеристик типовых звеньев САР»
Председатель РИС Зам.директора ИНиГ по учебно-
___________ Пашкин Д.А. методической работе
___________ Ефремова В.В.
«___»__________2008г
Подписи и телефоны Зав. Кафедрой « АиУ»
Авторов ______________Мусихин С.А.
___________ Мусихин С.А.
тел. 20-30-28 Протокол №___
от «__»_______ 2008
Председатель учебно-методического
совета ИНиГ
__________Сорокина М.Р.
«___»_________ 2008г
Тюмень – 2008г
Утверждено методическим советом Тюменского государственного нефтегазового университета
Составители: С.А.Мусихин
.
©Тюменский государственный нефтегазовый университет, 2008
ЛАБОРАТОРНАЯ РАБОТА N 5
Исследование динамических характеристик типовых звеньев систем автоматического регулирования
ЦЕЛЬ РАБОТЫ. Снять осциллограммы переходных процессов на выходе типовых звеньев. Экспериментально определить параметры динамических звеньев по полученным переходным характеристикам.
Общие положения
Системы автоматического регулирования технологических процессов представляют собой совокупность элементов определенным образом соединенных между собой, где каждый элемент выполняет те или иные функции.
Элементы автоматики чрезвычайно разнообразны по конструкции, принципам действия, характеристикам, физической природе преобразуемых сигналов, функциям выполняемых в устройствах автоматического управления технологическими процессами.
По выполняемым функциям элементы системы автоматики делятся на датчики, усилители, вычислительные элементы, согласующие и вспомогательные элементы, объекты управления и т.д.
Основное влияние на функционирование систем автоматического регулирования (САР) оказывают динамические свойства элементов, входящих в структуру системы, которые описываются дифференциальными уравнениями, выражающими зависимость между входными и выходными величинами во времени. Эти уравнения (математические модели) составляются на основании физических законов, связанные, как правило, с физическими процессами в реальных устройствах.
Зная дифференциальные уравнения всех элементов, входящих в систему и связи между элементами, можно составить дифференциальное уравнение САР в целом. В результате решения дифференциального уравнения получают выражение изменения регулируемой величины во времени при изменении входной величины по некоторому закону, график которой называется переходной характеристикой системы или просто - переходным процессом.
График переходного процесса позволяет проанализировать работу системы регулирования или отдельного звена системы. По графику переходного процесса можно определить следующую информацию:
что произойдет в системе под действием возмущающих воздействий;
будет ли система устойчивой;
будет ли отклонение регулируемой величины длительным или кратковременным в переходном режиме;
как точно будет поддерживаться ее заданное значение;
какие изменения в системе регулирования могут уменьшить влияние возмущений.
При математическом описании элементов систем автоматического регулирования не имеют значение принципы построения самого элемента, так как элементы самой различной физической природы могут быть представлены в виде одинаковых динамических звеньев, если их динамические свойства описываются одинаковыми дифференциальными уравнениями. Поэтому при решении задач синтеза и анализа автоматических систем все многообразие элементов автоматики сводится к нескольким типовым динамическим звеньям.
Например, в качестве простейшего апериодического звена можно привести: электронный усилитель с индуктивной нагрузкой, магнитный усилитель, термодатчик, исполнительный двигатель постоянного тока.
Все приведенные выше объекты описываются одним и тем же дифференциальным уравнением (1), хотя имеют различную физическую природу, назначение, конструкцию и прочее.
![]() (1)
(1)
где X(t) - изменение входного сигнала;
Y(t) - изменение выходного сигнала;
Т - постоянная времени звена, с ;
К - коэффициент передачи (усиления) звена.
Для упрощения записи и решения дифференциальных уравнений в теории регулирования используют функциональное преобразование Лапласа, которое приводит исходное уравнение к уравнению в операторном виде (алгебраическому). Преобразование Лапласа представляет собой функциональное преобразование, при котором функция времени преобразуется в функцию комплексного переменного. В общем виде для функции времени f(t) изображение по Лапласу F(p) определяется по формуле:
![]() (2)
(2)
где
s =
![]() .
.
Преобразование Лапласа позволяет находить решение дифференциального уравнения без непосредственного его интегрирования.
Например, дифференциальное уравнение (1) в операторной форме записывается следующим образом:
(Ts+1) Y(s) = KX(s) (3)
При анализе САР удобнее пользоваться не дифференциальным уравнением, а передаточной функцией системы.
Передаточная функция звена ( системы) - это отношение изображения по Лапласу выходной величины к изображению по Лапласу входной величины при нулевых начальных условиях.
Для приведенного выше дифференциального уравнения передаточная функция будет иметь вид:
![]() (4)
(4)
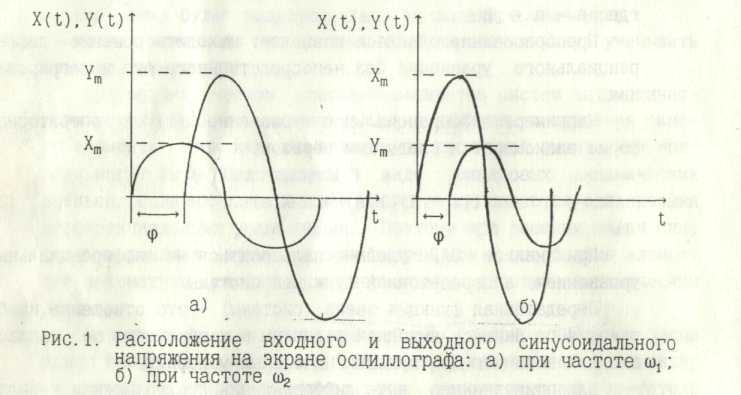
Возможна и иная форма записи передаточной функции. Предположим, что на вход звена подано синусоидальное воздействие с частотой ω и амплитудой Хm:
X(t) = Хm sin(ωt).
Тогда на выходе звена получим также синусоидальный сигнал той же частоты, так как звено линейное, но с измененной амплитудой Ym и сдвинутый по фазе на угол φ:
Y(t) = Ym sin(ωt + φ).
Одновременно входной и выходной процесс можно наблюдать на экране двухлучевого осциллографа. На рисунке1 показаны сигналы X(t) и Y(t) при различных значениях частоты входного сигнала.
Запишем комплексные выражения для входного и выходного воздействия в показательной форме для частоты ω1. Фазовый сдвиг входного сигнала X(t) равен нулю, тогда как фазовый сдвиг выходного сигнала относительно входного составляет φ. Тогда получим:
X (jω1)=Xm*ejo,
Y(jω1)=Ym*ejφ.
Найдем отношение этих выражений:
![]() (5)
(5)
где К - коэффициент передачи звена на частоте ω1;
φ - фазовый сдвиг на частоте ω1.
Функция
W(jω), полученная из выражения для
передаточной функции заменой s на j ω
называется амплитудно-фазовой
характеристикой (АФХ) или частотной
передаточной функцией динамического
звена. Физический смысл функции W(j ω)
заключается в том. что амплитуда и фаза
выходного сигнала зависят от частоты
входного синусоидального сигнала при
изменении частоты ω от 0 до
![]() .
.
Для апериодического звена выражение АФХ будет иметь вид:
![]() (6)
(6)
Как и любую комплексную величину W(jω) можно представить в алгебраической форме в виде суммы вещественной и мнимой частей:
W(jω) = Re (ω) + jIm(ω). (7)
Для выделения мнимой и вещественной части W(jω) апериодического звена необходимо числитель и знаменатель этой функции умножить на комплексно-сопряженное число знаменателя:
![]()
где
Re (![]() )
=
)
=![]() ;
;
Im(
)=![]()
Модуль функции W(j ) представляет собой зависимость коэффициента передачи от частоты, то есть является амплитудно-частотной характеристикой звена (АЧХ) (рис.2) и описывается выражением:
![]() (8)
(8)
Для апериодического звена получим:
![]()
В свою очередь аргумент частотной передаточной функции, представляющий собой зависимость угла сдвига фаз между выходными и входными воздействиями от частоты, является фазо-частотной характеристикой звена (ФЧХ) (рис.3):
![]() (9)
(9)
Для апериодического звена ФЧХ определяется выражением:
![]()
На комплексной плоскости для какой-либо конкретной частоты 1 передаточную функцию можно представить в виде вектора длинной А( 1), повернутого относительно положительного направления вещественной оси на угол φ(ω1). На рис.4 приведен пример амплитудно-фазовой характеристики апериодического звена .
При изменении частоты от 0 до конец этого вектора в соответствии с изменением его модуля А( ) и аргумента φ( ) опишет на комплексной плоскости кривую, называемую годографом амплитудно-фазовой характеристики.

Помимо частотных, другим широко используемым для описания динамических звеньев типом характеристик является переходная характеристика.
Переходная функция h(t) - это реакция звена (системы) при подаче на вход единичного ступенчатого воздействия (единичной функции).
Такая функция, обозначаемая 1(t), мгновенно возрастает от О до 1 и затем остается постоянной (рис.5).
![]()
Чтобы получить график переходного процесса необходимо решить дифференциальное уравнение звена (системы) или снять его экспериментально.
Переходные и частотные характеристики однозначно связаны между собой и с уравнением звена. Они широко применяются в теории регулирования для описания как отдельных звеньев, так и систем в целом. Частотные и переходные характеристики звеньев или системы автоматического регулирования можно легко снять экспериментально.