

2.2. Прилади електромагнітної системи
Принцип дії приладів електромагнітної системи заснований на явищі втягування феромагнітного осердя 1 всередину нерухомої котушки 2, магнітне поле якої створює вимірюваний струм і (рис. 2.2).
Припустимо, що у котушці протікає постійний струм I. Цей струм створює магнітне поле, яке намагається пересунути рухоме осердя 1 всередину котушки так, щоби магнітний опір шляхів замикання ліній магнітного поля став мінімальним.
Зменшення
енергії магнітного поля
![]() WM
у
повітряному проміжку при переміщенні
рухомого осердя від положення 1
до положення 2 дорівнює роботі, що була
виконана при переміщенні цього осердя,
тобто
WM
у
повітряному проміжку при переміщенні
рухомого осердя від положення 1
до положення 2 дорівнює роботі, що була
виконана при переміщенні цього осердя,
тобто
W1-W2= WM = F x. (2.5)
Тут F — електромагнітна сила, х — довжина шляху переміщення рухомого осердя.
При
повороті рухомої частини на кут
і радіусі повороту r
довжина
шляху переміщення рухомого осердя
![]() х
= r
.
Тут
r
—
у метрах,
—
у радіанах. Обертальний момент:
х
= r
.
Тут
r
—
у метрах,
—
у радіанах. Обертальний момент:
![]() .
.
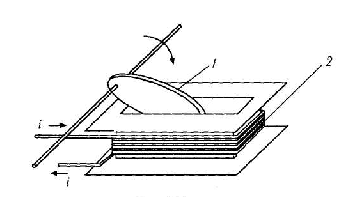
Рис. 2.2. Конструкція механізму приладу
Енергія,
накопичена у магнітному полі котушки
![]() .
При
повертанні феромагнітного осердя
індуктивність котушки L
змінюється,
тому:
.
При
повертанні феромагнітного осердя
індуктивність котушки L
змінюється,
тому:
|
(2.6) |
Протидіючий момент пружин МПР = СЖ. В стані зрівноваженості МОБ = МПР, звідси кут повороту рухомої частини приладу:
|
(2.7) |
З (2.7) видно, що кут а повороту рухомої частини приладу електромагнітної системи пропорційний квадрату вимірюваного струму та зміні індуктивності вимірювальної котушки внаслідок переміщення рухомого осердя.
Якщо через котушку тече змінний струм, то із зміною напряму струму одночасно змінюються на протилежні магнітні полюси феромагнітного рухомого осердя, внаслідок чого прикладені до нього сили не змінюють свого напряму.
Основні переваги приладів електромагнітної системи — простота і надійність, висока перевантажувальна здатність (переріз проводу котушки можна обрати з запасом), невисока ціна та можливість використання для вимірювань у колах як постійного, так і змінного струму.
До недоліків приладів електромагнітної системи можна віднести невисокий клас точності вимірів, звичайно не вищий 1,0 внаслідок впливу гістерезису в рухомому осерді, відносно велику споживану потужність (до 3-5 Вт у вольтметрах), нерівномірність шкали, низьку чутливість особливо при малих струмах у котушці. Внаслідок цього початкова частина шкали (до 25%) таких приладів не має поділок і не може бути використана для вимірів.
2.3. Прилади електродинамічної системи
Принцип дії приладів електродинамічної системи полягає у силовій взаємодії провідників із струмами. Відомо, що два провідники із струмами однакового напрямку притягуються і взаємно відштовхуються, якщо струми мають протилежний напрям.
Прилад
такої системи (рис. 2.3) має дві котушки:
нерухому 2 і рухому З, яка закріплена на
осі та повертається разом із нею відносно
котушки 2.
Струм
I2,
до рухомої котушки 3
підводять
тонкими гнучкими проводами через
закріплені ізольовано на осі спіральні
пружини 1,
які створюють протидіючий момент МПР.
На
осі рухомої котушки закріплено також
стрілку 4
та
повітряний заспокоювач 5.
Обертальний
момент електродинамічного вимірювального
механізму визначають так само, як і в
електромагнітному механізмі:
![]() .
В
електродинамічному механізмі енергія
магнітного поля WM
змінюється
внаслідок повороту рухомої котушки,
тобто внаслідок зміни взаємної
індуктивності котушок М.
Енергія
магнітного поля взаємної індуктивності
двох котушок
.
В
електродинамічному механізмі енергія
магнітного поля WM
змінюється
внаслідок повороту рухомої котушки,
тобто внаслідок зміни взаємної
індуктивності котушок М.
Енергія
магнітного поля взаємної індуктивності
двох котушок
![]() ,
а обертальний момент:
,
а обертальний момент:
|
(2.8) |
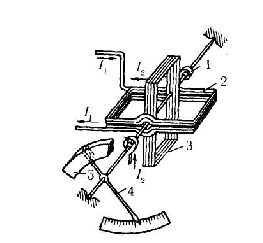
Рис. 2.3. Конструкція механізму приладу
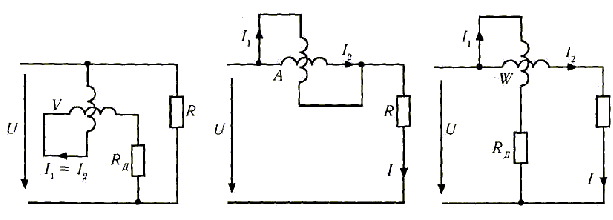
У вольтметрі електродинамічної системи обидві котушки виготовляють з великою кількістю витків і з'єднують послідовно між собою та з додатковим резистором RД (рис. 2.4, а). Таким чином струм в електродинамічному вольтметрі:
![]() ,
,
де U - вимірювана напруга, RК - омічний опір двох котушок приладу, RV - сумарний опір вимірювального кола вольтметра. Підставивши значення I1= I2 до (2.8), отримаємо:
|
(2.9) |
Отже, шкала електродинамічного вольтметра квадратична, як і в електромагнітного. Для виправлення цього недоліку можна впливати на залежність взаємоіндуктивності М від положення рухомої котушки зміною форми котушки та початкового положення котушок.
а б в
Рис. 2.4. Схеми приладів електродинамічної системи
Звичайно рухому котушку приладу електродинамічної системи виготовляють з тонкого проводу на струм не більший 0,5 А. Тому послідовне з'єднання котушок 1 та 2 в амперметрах електродинамічної системи можна застосовувати лише при вимірюваних струмах до 0,5 А. В амперметрах електродинамічної системи на більші струми рухому та нерухому обмотки з'єднують паралельно (рис. 2.4, б), причому нерухому обмотку 1 виконують на більший струм з проводу більшого перерізу. У такому випадку струм рухомої котушки I2, є тільки частинкою струму нерухомої котушки I1, I2 = k2I а струм нерухомої котушки — частинкою вимірюваного струму I, I1 = k2I. Тоді, з врахуванням (2.8):
|
(2.10) |
Тобто обертальний момент амперметра — квадратична функція від вимірюваного струму. Внаслідок цього шкала амперметра електродинамічної системи так само нелінійна, як і у вольтметра.
У ватметрах електродинамічної системи (рис. 2.4, в), ввімкнених до кола постійного струму, струм у нерухомій обмотці дорівнює вимірюваному струму, тобто I2 = 1. До кола ж рухомої обмотки 1 з додатковим опором RД прикладемо напругу U на ділянці кола, де вимірюють потужність. Струм у рухомій обмотці I1=U/RV, де RV - сумарний опір кола обмотки напруги ватметра. Підставивши значення струмів до (2.10), отримаємо:
|
(2.11) |
де P — вимірювана потужність.
Отже,
обертальний момент ватметра
електродинамічної системи є пропорційний
значенню вимірюваної потужності. Щоби
зробити шкалу такого ватметра рівномірною,
достатньо лише виконати умову М
= км,
де
км
-
постійний коефіцієнт. У такому випадку
![]() буде
постійною величиною. Практично це
забезпечують при конструюванні ватметрів,
тому більшість ватметрів має лінійну
шкалу. Якщо ватметр, зображений на рис.
7.7, в,
ввімкнути
до кола змінного струму, то внаслідок
інерційності рухомої частини її
відхилення буде визначатися середнім
значенням обертального моменту за
період:
буде
постійною величиною. Практично це
забезпечують при конструюванні ватметрів,
тому більшість ватметрів має лінійну
шкалу. Якщо ватметр, зображений на рис.
7.7, в,
ввімкнути
до кола змінного струму, то внаслідок
інерційності рухомої частини її
відхилення буде визначатися середнім
значенням обертального моменту за
період:
![]() ,
,
де
р
—
миттєве значення потужності, а
![]() - середнє значення потужності в колі,
тобто активна потужність;
- середнє значення потужності в колі,
тобто активна потужність;
![]() .
.
Отже, у колі змінного струму середнє значення обертального моменту ватметра:
![]() .
.
Таким чином, прилади електродинамічної системи придатні для проведення вимірів у колах як постійного, так і змінного струму, причому в обох випадках шкала у приладів одна й та сама. Прилади електродинамічної системи створюють магнітне поле у повітрі, тому для отримання потрібного обертального моменту обмотки повинні мати велику кількість витків і споживана ними потужність відносно велика. Ці прилади чутливі також до зовнішніх магнітних полів і відносно дорогі. Але завдяки відсутності феромагнітних осердь з нелінійними властивостями електродинамічні прилади можуть мати клас точності 0,1.
Чутливість електродинамічних приладів до зовнішніх полів послаблюють застосуванням феромагнітних осердь для підсилення власних магнітних полів котушок. Одночасно цим підсилюють і обертальний момент приладів, але одночасно зменшується їх точність завдяки явищу гістерезису та вихровим струмам у осерді. Такі прилади називають феродинамічними. їх застосовують головним чином як щитові ватметри невисокої точності.