

2.3 Погрузчики
Для внутрицехового и межцехового транспорта, а также для погрузочно-разгрузочных работ на складах, железных дорогах и в портах широко применяют погрузчики (рис.1.3). Они выполняют операции захватывания, вертикального перемещения груза и укладки его в штабель или на транспортные средства. Отечественная промышленность выпускает погрузчики с приводом от двигателя внутреннего сгорания или с электроприводом, питающимся от аккумуляторной батареи. При работе в закрытых помещениях и цехах применяют аккумуляторные погрузчики. Отечественные аккумуляторные погрузчики выпускают грузоподъемностью не более 5т, погрузчики с двигателем внутреннего сгорания - грузоподъемностью 3,2т и более.
В зависимости от назначения погрузчики выполняют в виде самоходных тележек, имеющих подвижную платформу с подъемным грузозахватным устройством, или в виде тягачей для буксирования прицепных тележек. В зависимости от характера выполняемой работы и вида груза погрузчики оборудуют различными специальными приспособлениями для захватывания штучных грузов и укладки их в штабеля или на стеллажи.
Универсальность погрузчика и возможность его использования определяются числом и конструкцией сменных грузозахватных приспособлений, основным их которых является вилочный захват. Для работы с некоторыми грузами (бочки, рулоны, ящики и т.п.) на каретке грузоподъемного устройства устанавливают захват с челюстями плоской или полукруглой формы, которые можно поворачивать на угол 90 ... 3600. Это позволяет установить его на требуемом положении. Для удобства захватывания, транспортирования и укладки· грузов рама погрузчика может отклоняться вперед на угол 3 ... 6° (рис.1.2) и назад на угол 10 ... 15°. Наклон рамы вперед, про изводимый при помощи гидроцилиндра, облегчает сталкивание груза с вилочного захвата при штабелировании, наклон назад увеличивает устойчивость погрузчика при пере возке груза.
Отечественные погрузчики имеют гидравлический или механический привод грузоподъемного устройства. Преимуществом гидравлического привода является плавность подъема и опускания каретки, широкий диапазон регулирования скорости и простота конструктивной схемы. Механический привод требует применения специального редуктора и весьма длинной грузовой цепи.
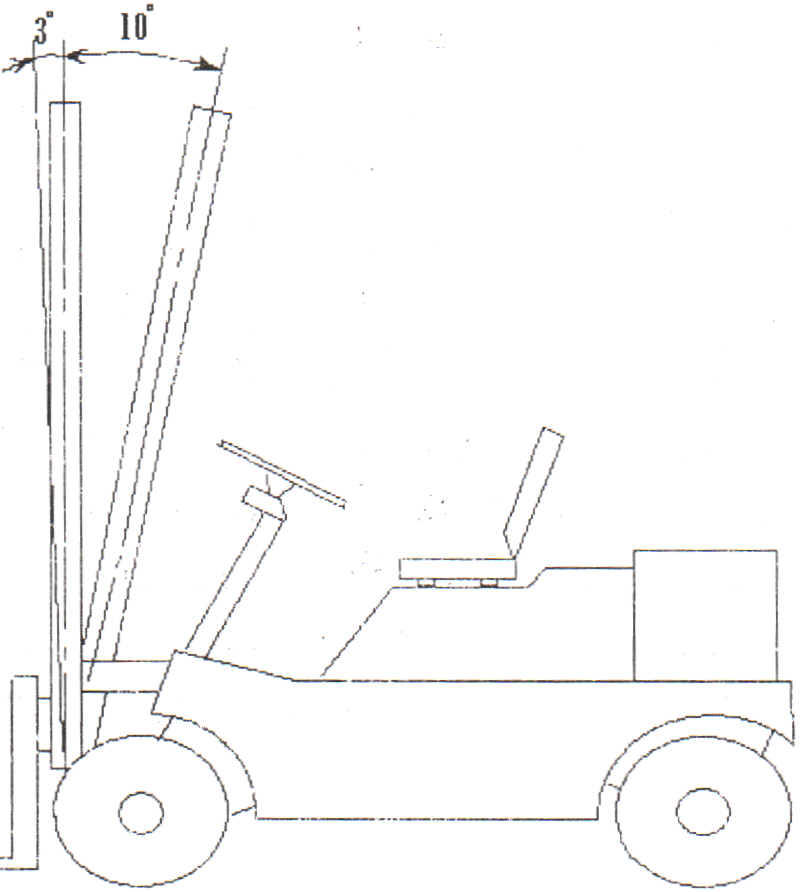
Рис. 2.3
3. Приводы машин
3.1 Гидровлический привод
Под гидроприводам понимают гидравлическую систему (система машин и гидроагрегатов), служащую для передачи посредством жидкости механической энергии на расстояние и преобразования ее в кинетическую энергию на выходе из системы с одновременным выполнением функции регулирования и реверсирования скорости выходного звена, а также преобразования одного вида движения в другой.
Основными преимуществами гидравлических приводов являются малые габариты и малый вес, приходящийся на единицу передаваемой мощности в частности весовая отдача насоса, работающего при числах оборотов 2500 3000 в минуту и давлениях 200-250 кг/см2, не превышает 02 - 03 кг на 1 кВт отдаваемой мощности.

Рис 3.1
На рис.3.1 показана упрощенная схема гидропривода с гидродвигателем прямолинейного возвратно - поступательного движения. На рисунке изображен предохранительный клапан 5 и бак для рабочей жидкости 6. Реверсирование гидродвигателя гидропередачи вращательного движения осуществляется либо с помощью распределительного устройства 3, либо изменением направления потока жидкости подаваемой насосом 1.
При условии герметичности гидроагрегатов и практической несжимаемости жидкости выходное звено гидродвигателя должно перемещаться с определенной скорости для того, чтобы про пустить через свои рабочие камеры жидкость, подаваемую насосом.
3.2Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности. Функциональная схема
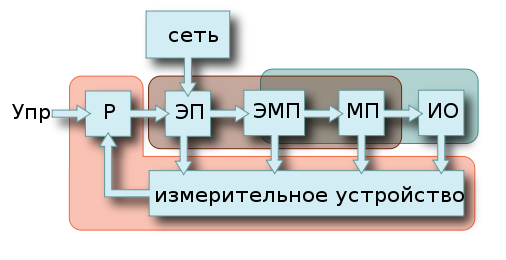
Рисунок 3.2
Функциональные элементы:
Регуляторы (Р) предназначен для управления процессами, протекающими в электроприводе.
Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
Механический преобразователь (МП) может изменять скорость вращения двигателя, а ткаже характер движения (с вращательного на вращательное или с вращательного на поступательное).
Упр — управляющие воздействие.
ИО — исполнительный орган.
Функциональные части:
Силовая часть или электропривод с разомкнутой системой регулирования;
Механическая часть;
Система управления электропривода.