Кинематическая пара
Кинематическая пара - это соединение двух звеньев, обеспечивающее перемещение одного звена относительно другого.
Кинематические пары передают нагрузку и движение и часто определяют работоспособность и надежность механизма и машины в целом. Поэтому правильный выбор вида пары, ее формы и размеров, а также конструкционных материалов и условий смазывания имеет большое значение при проектировании и эксплуатации машин.
Кинематические пары классифицируются по следующим признакам:
А).По числу степеней подвижности н
Возможные независимые движения одного звена относительно другого называются степенями подвижности кинематической пары H.
Ограничения, накладываемые на относительные движения звеньев, называются условиями связи в кинематических парах.
Число степеней подвижности кинематической пары определяется зависимостью
H=6-S (1.1)
где 6-максимальное число степеней свободы твердого тела в пространстве (3 поступательных и 3 вращательных движения относительно осей координат XYZ);
S-число условий связи, наложенных кинематической парой на относительное движение каждого звена.
Кинематические пары делятся на: одноподвижные (поступательные, вращательные, винтовые), двухподвижные, (кулачек-толкатель, зуб-зуб), трехподвижные, (сферические), четырёхподвижные, (цилиндр-плоскость), пятиподвижные (шар-плоскость). Примеры приведены в таблице1.1.
Б).По характеру соприкосновения звеньев
кинематические пары делятся на низшие и высшие
Низшими кинематическими парами называются такие, в которых соприкосновение звеньев происходит по поверхности.
Например, одноподвижные поступательная и вращательная кинематические пары,
Высшими называются такие кинематические пары, у которых соприкосновение звеньев происходит по линии или точке.
Например, кинематические пары зуб-зуб, кулачек-толкатель (рис.1.2, 1.3).
Так как в низших кинематических парах звенья соприкасаются по поверхностям, то удельное давление в них невелико, вследствие чего износ в низших кинематических парах невелик.
В местах контакта высших кинематических пар удельное давление очень велико, что вызывает их повышенный износ. Это большой недостаток высших кинематических пар по сравнению с низшими.
Однако они имеют и большое преимущество: если количество низших пар ограничено, то высших пар большое разнообразие, их количество практически не ограничено. Поэтому при помощи высших кинематических пар значительно проще создать механизмы, обеспечивающие заданный закон движения.
В).По характеру относительного движения
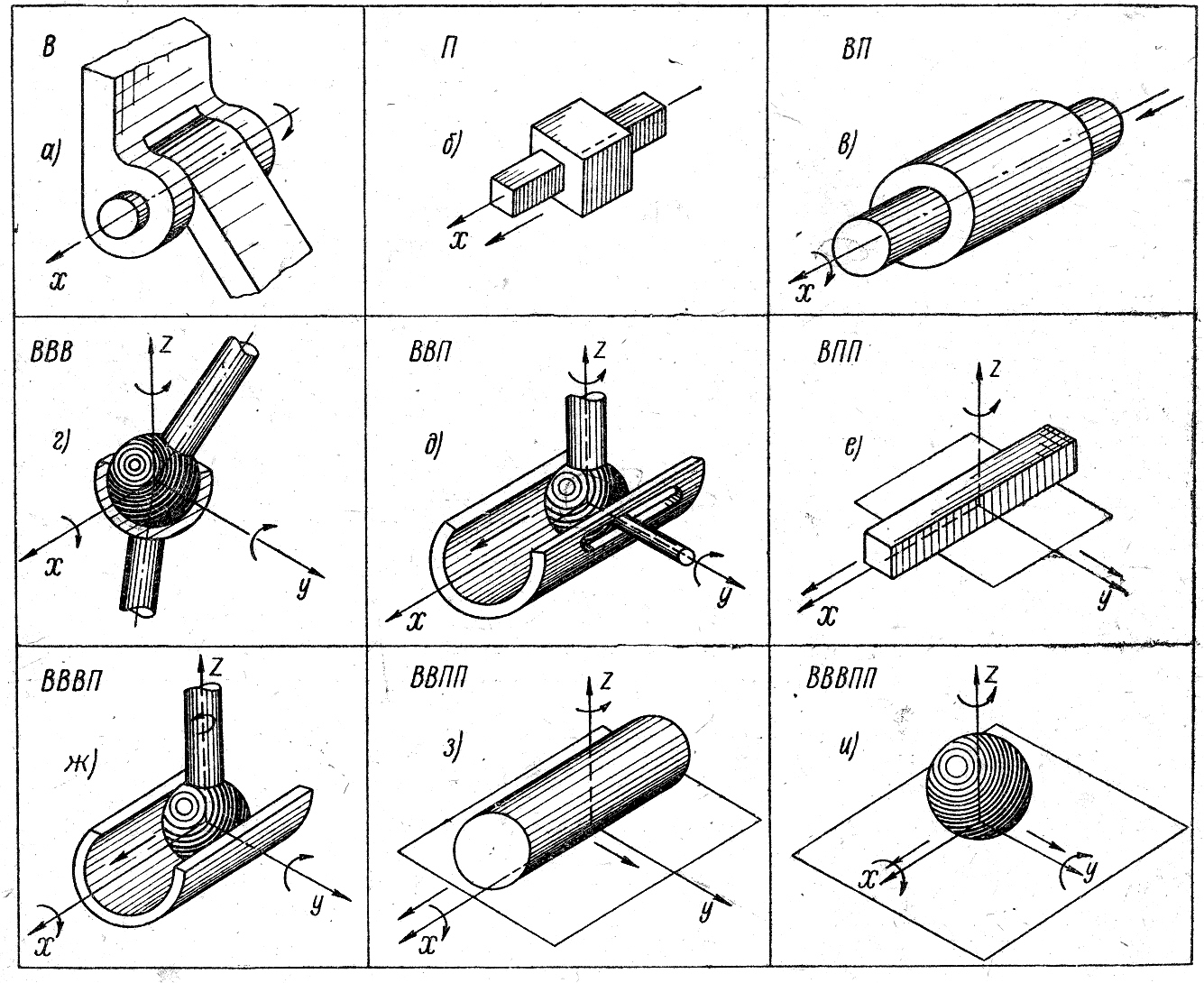
Виды кинематических пар приведены в таблице 1.1.
В – вращательная (Н=1), П – поступательная (Н=1), ВП – цилиндрическая (Н=2); ВВВ – сферическая (Н=3), ВВП – шар-цилиндр с прорезью (Н=3), ВПП – плоскостная (Н=3), ВВВП – шар-цилиндр (Н=4), ВВПП – цилиндр-плоскость (Н=4), ВВВПП – шар-плоскость (Н=5). Здесь буква «В» обозначает возможное вращательное движение, «П» -возможное поступательное движение.
Таблица 1.1