

Класифікація електричних машин
Оснач. Товарознавство промислове обладнання, прилади, інструменти
Електричні машини класифікують за такими ознаками: ♦ принципом дії і призначенням - на генератори, двигуни, перетворювачі й електромеханічні перетворювачі сигналів; ♦ характером виконання функцій - виконавчі двигуни, тахогенератори, поворотні трансформатори, електромашини синхронного зв'язку (сельсини), лінійні двигуни, електромашини подвійного живлення, мікродвигуни загального застосування та ін.; ♦ родом струму, що генерується або споживається - постійного (колекторні, вентильні) і змінного (асинхронні та синхронні); ♦ потужністю - мікромашини (до 500 Вт), малої (0,5-10 кВт), середньої (10-200 кВт) і великої потужності (200 кВт і більше); ♦ конструкцією - із фазовим і короткозамкнутим ротором; ♦ формою виконання і побудовою з позначенням: Е - без підшипників і вала, Щ - із щитовими підшипниками, ЩС - із щитовими і стояковими, С - із стояковими, Ф -із фланцевим кріпленням, В - із вертикальним валом, А -спарені машини, О - машини, що обдуваються, П - із підвищеним пусковим моментом, С - із підвищеним ковзанням, В - машини, що вбудовуються, К - з фазовим ротором, Т - для текстильної промисловості, Л - полегшені; ♦ характером зміни навантаження і режимом роботи тривалого, короткочасного і повторно - короткочасного; ♦ способом збудження - із незалежним і самозбудженням (паралельним, послідовним і змішаним); ♦ залежно від вимог до захисту машин від впливу зовнішнього середовища - відкриті, захищені, водозахищені, закриті, вибухобезпечні, герметичні. До підгрупи електротехнічних машин відносяться також статичні електромагнітні пристрої - електричні трансформатори, оскільки фізичні явища, що протікають у них, відповідають природі електромагнітних процесів. На рис. 2.1 наведена класифікація електричних машин за різними ознаками.
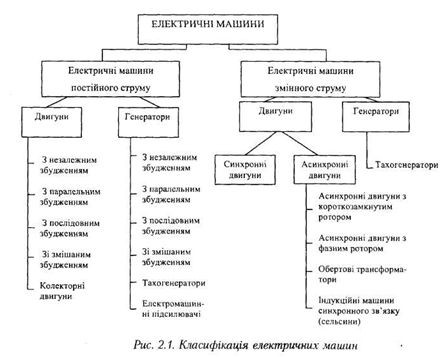
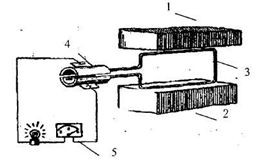
Рис. 2. 2. Генератор постійного струму 1 - північний полюс магніту, 2 - південний полюс магніту, З - рамка, 4 - колектор, 5 - зовнішнє коло
Коефіцієнт потужності – це фазовий кут між напругою та струмом (cosφ)
cos phi (φ) використовується (окрім іншого обчислень) для обчислення енергії, яку споживає електродвигун.
Споживання енергії насправді є дуже важливим фактором коли йдеться про насосні системи та насоси. Для насосів зі стандартними електродвигунами змінного струму, споживана потужність визначається шляхом вимірювання вхідної напруги вхідного струму, а також на основі значення величини cosφ при повному навантаженні згідно з даними заводської таблички електродвигуна. Cosφ – це фазовий кут між напругою та струмом. Cosφ також називають коефіцієнтом потужності (КП). Споживання енергії P1 можна обчислити за формулами, які зазначені нижче, враховуючи тип електродвигуна: однофазний чи трифазний.
Однофазний електродвигун змінного струму, наприклад, 1 x 230 В
P1 = U * I * cosφ
Трифазний електродвигун змінного струму, наприклад, 3 x 400 В
P1 = * U * I * cosφ
Електричні потужності струму
У колах постійного струму існує тільки активна потужність, її розраховують за однією з формул:
 .
(2.90)
.
(2.90)
У колах змінного струму потрібно розрізняти три потужності: активну, реактивну, повну (у колах несинусоїдного струму ще є потужність спотворень).
Отже, розглянемо однофазне коло змінного струму (рис.2.33). Нехай при напрузі.
 (2.91)
(2.91)
в колі протікає струм:
 (2.92)
(2.92)
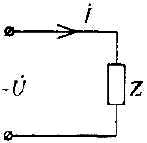
Рис 2.33
Спряжений комплекс струму очевидно буде:
 (2.93)
(2.93)
Розглянемо добуток комплексу напруги на спряжений комплекс струму, позначивши добуток буквою S.
 (2.94)
(2.94)
Тут
зсув за фазою між вектором напруги т а
спряженим комплексом струму позначений
 .
.
Переведемо в алгебраїчну форму отриманий вираз (2.94):
 .
(2.95)
.
(2.95)
Активна потужність:
 (2.96)
(2.96)
Реактивна потужність:
 (2.97)
(2.97)
Повна потужність
 (2.98)
(2.98)
Отримані
формули для розрахунку потужностей
справедливі для випадку, коли
 ,
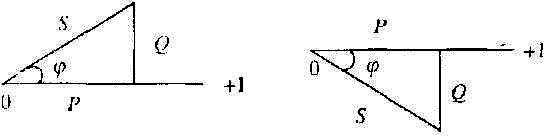
тобто коло активно індуктивне. На рис.
2.34, а наведений трикутник потужностей,
який відповідає формулі (2.95).
,
тобто коло активно індуктивне. На рис.
2.34, а наведений трикутник потужностей,
який відповідає формулі (2.95).
 а) б)
а) б)
Рис. 2.34
Якщо ж характер кола буде R, C, то тоді:
 (2.99)
(2.99)
і трикутник потужностей буде «перевернутий» (рис. 2.34, б).
Відмітимо, що при розрахунку потужностей за наведеними формулами потрібно підставляти не комплекси, а модулі діючих значень напруги і струму. При побудові трикутника потужностей не слід їх позначати стрілками, бо потужності — величини скалярні. Як бачимо, трикутники потужностей подібні до трикутників опорів для відповідних кіл. Із цих прямокутних трикутників за формулами тригонометрії можна брати необхідні співвідношення, наприклад:

 тощо.
тощо.
Декілька слів про фізичну сутність потужностей. Активна потужність Р — це енергія за одиницю часу, яка виділяється у вигляді тепла при протіканні струму по активному опору або потужність, яка витрачається па виконання роботи, наприклад, обертання електродвигуна, підйом вантажу електромагнітом і т.п. Одиниця вимірювання активної потужності — Ват (Вт).
Реактивна потужність Q — це та потужність, яка віддається джерелом на створення електромагнітного поля індуктивності (без чого не можуть працювати трансформатори, електричні машини) або електричного поля ємності. Одиниця вимірювання реактивної потужності — вольт-ампер реактивний (ВАр).
Повна
потужність
S
— це та найбільша потужність, яка буде
забиратися від джерела, коли
 .
Потужність трансформатора вимірюється
в вольт-амперах, тобто в одиницях повної
потужності S
та
характеризує максимально допустиму
потужність по нагріву обмоток
трансформатора.
.
Потужність трансформатора вимірюється
в вольт-амперах, тобто в одиницях повної
потужності S
та
характеризує максимально допустиму
потужність по нагріву обмоток
трансформатора.
Для кіл змінного струму також, як і для кіл постійного струм)- (див. 1.9) застосовується перевірка розрахунків за балансом потужностей. Але у колах змінного струму потрібно перевіряти окремо баланс за активною і реактивною потужностями:
 (2.100)
(2.100)
причому потужність Pдж розраховується за формулою:

Потужність Pспож розраховується за формулою:
Для реактивних потужностей:
 (2.101)
(2.101)
причому
потужність
 розраховується за формулою:
розраховується за формулою:
 ,
,
а при розрахунку реактивних потужностей споживачів
 (2.102)
(2.102)
тобто реактивну потужність, яка виділяється на ємнісному споживачеві, потрібно брати з мінусом.
ІІ. Актуалізація опорних знань. На попередніх уроках ми з вами вивчили закон Ома для ділянки кола. Хто з вас мені його нагадає? (Учні дають відповідь). Сила струму в ділянці кола прямо пропорційна напрузі на кінцях цієї ділянки і обернено пропорційна її опору: . ІІІ. Вивчення нового матеріалу. Електричні кола, з якими доводиться мати справу на практиці, звичайно складаються не з одного приймача електричного струму, а з кількох різних, які можуть бути з'єднані між собою по-різному. Знаючи опір кожного і спосіб їх з'єднання, можна розрахувати загальний опір кола. На малюнку 78, а зображено коло послідовного з'єднання двох електричних ламп, а на малюнку 78, б – схему такого з’єднання. Якщо вимкнути одну лампу, то коло розімкнеться і друга лампа погасне. Послідовно з'єднані, наприклад, акумулятор, лампочка, два амперметри і ключ у колі, зображеному на малюнку 61 (див. § 38). Ми вже знаємо, що при послідовному з'єднанні провідників сила струму в будь-яких частинах кола однакова, тобто А чому дорівнює опір послідовно з'єднаних провідників? З'єднуючи провідники послідовно, ми ніби збільшуємо довжину провідника. Тому опір кола стає більшим за опір одного провідника. Загальний опір кола при послідовному з'єднанні дорівнює сумі опорів окремих провідників (або окремих ділянок кола): Напругу на кінцях окремих ділянок кола визначають на основі закону Ома: , Звідси видно, що напруга буде більша на провіднику з найбільшим опором, оскільки сила струму скрізь однакова. Повна напруга в колі при послідовному з'єднанні, або напруга на полюсах джерела струму, дорівнює сумі напруг на окремих ділянках кола: Ця рівність випливає із закону збереження енергії. Адже електрична напруга на ділянці кола вимірюється роботою електричного струму, яка виконується при проходженні по цій ділянці кола електричного заряду в 1 Кл. Ця робота виконується за рахунок енергії електричного поля, і енергія, затрачена на всій ділянці кола, дорівнює сумі енергій, які затрачаються на окремих провідниках, що утворюють ділянку цього кола. ; ; Усі розглянуті закономірності справедливі для будь-якої кількості послідовно з'єднаних провідників. Інший спосіб з'єднання проводів, який застосовують на пактиці, називають паралельним з'єднанням. На малюнку 79, а зображено паралельне з'єднання двох електричних ламп, а на малюнку 79, б – схему цього з'єднання. Зверніть увагу на важливі особливості такого з'єднання. При паралельному з'єднанні всі його провідники одним своїм кінцем приєднуються до однієї точки кола А, а другим кінцем до другої точки В (див. мал. 79, б). Тому напруга на ділянці кола АВ і на кінцях усіх паралельно з'єднаних провідників однакова Тому в побуті і в техніці дуже зручно застосовувати паралельне з'єднання споживачів, оскільки всі споживачі в цьому разі виготовляють у розрахунку на однакову напругу. Крім того, при вимиканні одного споживача інші продовжують діяти, струм у них не переривається, бо коло замкнене. При паралельному з'єднанні струм у точці В (мал. 79, б) розгалужується на два струми і , які сходяться знову в точці А, подібно до того, як зображений на малюнку 80 потік води в річці розподіляється на два канали, що сходяться потім знову. Зрозуміло, що тобто сила струму в нерозгалуженій частині кола дорівнює сумі сил струмів в окремих паралельно з'єднаних провідниках. При паралельному з'єднанні ніби збільшується площа поперечного перерізу провідника. Тому загальний опір кола зменшується і стає меншим від опору кожного з провідників, увімкнених у коло. Так, наприклад, опір кола R, яке складається з двох однакових ламп опором R1 кожна, в два рази менший від опору однієї лампи: . ; У те саме електричне коло паралельно можна ввімкнути найрізноманітніші споживачі електричної енергії. На малюнку 81 зображено паралельне вмикання електричних ламп, нагрівальних приладів і електродвигуна. Таку схему з'єднання споживачів струму використовують, наприклад, у жилих приміщеннях; у точках а і б проводи освітлювальної мережі вводять у квартиру. Споживачі, які паралельно вмикають у цю мережу, мають бути розраховані на однакову напругу, що дорівнює напрузі в мережі. Напруга в мережі, яку використовують для освітлення і в побутових приладах, буває 127 і 220 В. Тому електричні лампи і різні побутові електроприлади виготовляють на 127 і 220 В. На практиці часто застосовують мішане (послідовне і паралельне) з'єднання провідників. Знаючи опір провідників, з'єднаних паралельно, напругу на цій ділянці кола, можна визначити багато інших електричних величин кола. Для цього треба використати формули: ; а також закон Ома для ділянки кола.
Послідовне та паралельне з’єднання провідників
Споживачі електричного струму можна поєднати двома способами: послідовно та паралельно.
Закономірності послідовного з’єднання провідників:
- сила струму на будь-яких ділянках кола однакова;
- повна напруга в колі дорівнює сумі напруг на окремих ділянках;
- загальний опір кола дорівнює сумі опорів окремих провідників.
Закономірності паралельного з’єднання провідників:
- сила струму в колі дорівнює сумі сил струмів на окремих провідниках;
- напруга в колі така ж сама, як і на кінцях окремих провідників;
- величина, обернена до загального опору провідників, дорівнює сумі величин, обернених до опорів окремих провідників.
Резонанс напруг
Резонанс напруг можливий у нерозгалуженій ділянці ланцюга, схема якого містить індуктивний L, ємнісний С и резистивный R елементи, тобто в послідовному коливальному контурі. Назва "резонанс напруг" відбиває рівність діючих значень напруг на ємнісному й індуктивному елементах при протилежних фазах, на якій обрана початкова фаза напруги. Величина має розмірність Ом і називається характеристичним опором коливального контуру. Відношення напруги на індуктивному або ємнісному елементах при резонансі до напруги U між висновками контуру, рівна відношенню характеристичного опору до опору резистивного елемента, визначає резонансні властивості коливального контуру й називається добротністю контуру Якщо при резонансі збільшити в однакове число раз індуктивний і ємнісний опори, то струм у ланцюзі не зміниться, а напруги на індуктивному і ємнісному елементах збільшаться в таке ж число раз. Можна необмежено збільшувати напруги на індуктивному і ємнісному елементах при незмінному струмі джерела. Фізичною причиною цього є коливання значної енергії, що запасається поперемінно в електричному полі ємнісного й у магнітному полі індуктивного елементів. При резонансі напруг малі кількості енергії, що надходить від джерела й втрати, що компенсує, енергії в активному опорі, достатні для підтримки незатухаючих коливань у ланцюзі щодо більших кількостей енергії магнітного й електричного полів. В електроенергетичних установках резонанс напруг - явище небажане, тому що при цьому напруги установок можуть у кілька разів перевищувати їхні робочі напруги. Але, наприклад, у радіотехніку, телефонії, автоматиці резонанс напруг застосовується для настроювання ланцюгів на задану частоту
Пуск, зупинка, реверсування і зміна частоти обертання електроприводу пов’язані з необхідністю переключення у ланцюгах живлення і керування електродвигуна. У найпростішому випадку ці переключення можуть бути виконані вручну. Проте сучасні процеси керування об’єктами, що рухаються, настільки швидкоплинні, що людина, в силу своїх обмежених фізичних і психічних можливостей, не в стані впоратись з ними з необхідною точністю і швидкістю. Це сприяло створенню систем автоматизованого керування електроприводами без особистої участі людини.
Ці системи керування поділяють на розімкнуті і замкнуті. У розімкнутій системі керування (рис.3.3.1,а) при виникненні відхилення вихідного параметра, наприклад швидкості переміщення регулюючого органу РО від заданого значення, керуючий сигнал U, на вході керуючого пристрою КП залишається незмінним. Іншими словами, розімкнуті системи не мають зворотнього зв’язку за контрольованим системою параметром. У замкнутій системі керування (рис.3.3.1,б) є ланцюги зворотніх зв’язків за одним або декількома параметрами. Наприклад, система містить давач швидкості ДШ (тахогенератор), що виробляє сигнал зворотнього зв’язку за швидкістю UЗЗШ регулюючого органу РО, і давач становища ДС (індуктивний давач), що виробляє сигнал зворотнього зв’язку за станом регулюючого органу РО. При відхиленні контрольованих параметрів від заданих значень на вхід керуючого пристрою КП надходять сигнали зворотнього зв’язку, що, взаємодіючи з керуючим сигналом Uk, корегують роботу системи керування.
Існують наступні види керування автоматизованими електроприводами: що стабілізує — підтримує якийсь параметр на заданому рівні; програмне — здійснює керування за заданою програмою; що стежить — відтворює зміну якогось параметру за визначеним законом: синхронне — забезпечує обертання з однаковою частотою декількох електродвигунів, які приводяться в рух діючи сумісно.
В залежності від виду комутуючих пристроїв, які керують роботою електроприводу, розрізняють автоматизовані електроприводи з релейно-контактним і безконтактним керуванням. У електроприводі з релейно-контактним керуванням всі переключення здійснюються за допомогою електромеханічних пристроїв дискретної дії: реле, контакторів, кнопок і т.д. Основні недоліки цих пристроїв – недовготривалість використання, обумовлена підгоранням контактів, що розмикаються, і значний час спрацьовування. Крім того, релейно-контакторна апаратура вимагає систематичного контролю і регулювання. У автоматизованих приводах, до яких ставиться вимога підвищеної надійності, застосовують безконтактні комутуючі пристрої. Керування струмом у цих пристроях відбувається за рахунок дискретної або аналогової (плавної) зміни їх параметрів. До безконтактних елементів відносяться: транзистори (напівпровідникові тріоди), тиристори (керовані діоди), фотодіоди, дроселі насичення і т.п., а також індуктивні і трансформаторні давачі, давачі ЕРС Хола, напівпровідникові і магнітні підсилювачі.

Рис.3.3.1. Структурні схеми АСУ розімкнута (а) і замкнута (б)
Автоматизоване керування електроприводом здійснюється у функції часу, швидкості (частоти обертання), струму або шляху, тобто в залежності від просторового становища регулюючого органу. Якщо електропривід працює в системі автоматичного керування яким-небудь технологічним процесом, то керування приводом здійснюється у функції якогось технологічного параметра: температури, тиску, розмірів оброблюваного виробу, його маси і т.д.