

4.4. Описание используемых расчетов.
Поверхностные свойства целлюлозных волокон имеет большое теоретическое значение, а их взаимодействие – технологическое. Это связано с вопросами устойчивости волокнистых дисперсных систем в технологическом процессе.
Так, на начальных стадиях производства бумаги необходимо обеспечить минимальное сцепление с последующим его усилением на стадии фильтрации до максимального в готовом материале.
Устойчивость волокнистой
суспензии связана с наличием на
поверхности волокна двойного электрического
слоя (ДЭС) на границе жидкой и твердой
фазами, а взаимодействие волокон
обусловлено теорией ДЛФО. Взаимодействие
двух целлюлозных волокон и наполнителя
зависит от величины поте нциальных
кривых – зависимость суммарной энергии
взаимодействии от расстояния, которые
определяются статически энергией
притяженияUm
и отталкивания Ui
частиц
нциальных
кривых – зависимость суммарной энергии
взаимодействии от расстояния, которые
определяются статически энергией
притяженияUm
и отталкивания Ui
частиц
U = Um + Ui.
Для экспериментальных
исследований, моделирования взаимодействия
индивидуальных волокон между собой и
расчета величины взаимодействия удобно
определять через их работу, воспользовавшись
теорий потенциальных полей. Для этого
покажем, что в потенциальном
поле работа сил поля на любом замкнутом
пути равна нулю.
Действительно, любой замкнутый путь
(рис. 4.6) можно разбить произвольно на
две части: 1а2
и 2b1.
Пользуясь известными рассуждениями,
запишем — поле потенциально
![]() ,
поэтому сумма работ в стационарных
силовых полях не зависит от пути
,
поэтому сумма работ в стационарных
силовых полях не зависит от пути
![]() .
.
Таким образом, равенство работы сил поля на любом замкнутом пути равное нулю есть необходимое и достаточное условие работы не зависит от формы пути.

Рис. 4.6. Работа в потенциальном поле сил
Центральную силу, действующую на волокна 1 со стороны волокна 2, можно представить в общем виде:
![]() ,
(4.1)
,
(4.1)
где f(r)
— функция, зависящая при данном характере
взаимодействия только от r;
r —
расстояния меж ду
частицами;
ду
частицами;![]() — единичный вектор, задающий направление
радиус-вектора точки1
относительно 2.
— единичный вектор, задающий направление
радиус-вектора точки1
относительно 2.
Волокна целлюлозы соприкасаются
друг с другом отдельными точками при
выходе на сеточный стол, то в дальнейшем
рассмотрим задачу в соответствии с рис.
4.7, где обозначим эти точки буквами А
и В. Здесь
работа силы
![]() пропорциональна радиус-вектору
пропорциональна радиус-вектору![]() точкиА
относительно точки В.
точкиА
относительно точки В.
 Рис.
4.7. Работа в поле потенциальных сил
Рис.
4.7. Работа в поле потенциальных сил
Для этого достаточно найти
работу центральных сил, если силовое
поле вызвано наличием одного неподвижного
волокна B,
а затем обобщим результат на любой
произвольный случай. Элементарная
работа силы
![]() на перемещение
на перемещение![]() есть
есть![]() .
Так как
.
Так как![]() ,
то проекция вектора
,
то проекция вектора![]() на вектор
на вектор![]() ,
или на соответствующий радиус-вектор
,
или на соответствующий радиус-вектор![]() (рис. 4.7), можно записать
(рис. 4.7), можно записать![]() .
При этом работа этой силы на произвольном
пути от точкиА
до точки В
.
При этом работа этой силы на произвольном
пути от точкиА
до точки В
![]() .
.
Полученное выражение зависит
только от вида функции
![]() ,
т. е. от характера взаимодействия и от
значений иr
— начального и конечного расстояний
между частицами A
и B.
,
т. е. от характера взаимодействия и от
значений иr
— начального и конечного расстояний
между частицами A
и B.
Полученный результат в
стационарном силовом поле показывает
действие на частицу A
с силами
![]() ,
,![]() .
В этом случае работа результирующей
силы при перемещении волокна с точкойA
из одной точки
в другую равна алгебраической сумме
работ отдельных сил.
.
В этом случае работа результирующей
силы при перемещении волокна с точкойA
из одной точки
в другую равна алгебраической сумме
работ отдельных сил.
Работа сил потенциального
поля зависит только от начального и
конечного положений рассматриваемой
точки, дает возможность ввести чрезвычайно
важ ное
понятие потенциала илипотенциальной
энергии.
ное
понятие потенциала илипотенциальной
энергии.
Перемещение точки А в новую точку А через фиксированную точку В есть работа сил поля, которая не зависит от формы пути, а это значит, что данная работа будет некоторой функцией радиус-вектора r точки А.
Обозначив эту функцию
![]() ,
запишем
,
запишем
![]() .
(4.2)
.
(4.2)
Функция
![]() естьпотенциальная
энергия точки
на поверхности волокна в данном поле.
естьпотенциальная
энергия точки
на поверхности волокна в данном поле.
Тогда найденную работу на пути АВА представим в виде
ААА = ААВ + АВА = ААВ – ААВ,
или с учетом (2) и рис. 1 и 2
![]() и
и
![]() . (4.3)
. (4.3)
Из полученного выражения видно, что энергия по мере удаления уменьшается. Таким образом, работа сил поля на пути А—А (1—2) равна убыли потенциальной энергии точки А поверхности волокна в данном поле.
Выражение (4.3) дает возможность
найти функцию
![]() для любого потенциального поля сил. Для
этого достаточно вычислить работу,
совершаемую силами поля на любом пути
между двумя точками, и представить ее
в виде убыли некоторой функции
для любого потенциального поля сил. Для
этого достаточно вычислить работу,
совершаемую силами поля на любом пути
между двумя точками, и представить ее
в виде убыли некоторой функции![]() (потенциальная энергия).
Это позволяет представить и вычислить
работу точки в потенциальных
полях как упругую
или гравитационную
(кулоновской) силу.
Тогда для сравнения запишем выражения
потенциальной энергии волокна для
различных силовых полей:
(потенциальная энергия).
Это позволяет представить и вычислить
работу точки в потенциальных
полях как упругую
или гравитационную
(кулоновской) силу.
Тогда для сравнения запишем выражения
потенциальной энергии волокна для
различных силовых полей:
1) в поле упругой силы —
![]() ;
;
2) в поле точе чной
массы (заряда) —
чной
массы (заряда) —
![]() ;
;
где
= –Gm1m2
для гравитационного
взаимодействия и
![]() для кулоновского взаимодействия;
для кулоновского взаимодействия;
3) в однородном поле сил тяжести
—
![]() .
.
Для определения связи потенциальной энергии с силами поля взаимодействия волокна, а точнее потенциальной точки на поверхности, с окружающими телами можно описывать двумя способами: с помощью сил или с помощью потенциальной энергии. В классической механике оба способа используют одинаково широко. Однако, первый способ обладает несколько большей общностью, ибо он применим и к таким силам, для которых нельзя ввести потенциальную энергию (например, к силам трения). Второй же способ применим только в случае консервативных сил.
Задача предлагаемого метода
— установить связь между потенциальной
энергией и силой поля, точнее, определить
поле сил
![]() по заданной потенциальной энергии
по заданной потенциальной энергии![]() как функции положения точки на поверхности
волокна в поле.
как функции положения точки на поверхности
волокна в поле.
При перемещении точки из
одного положения потенциального поля
в другое, работу, которую произведут
силы поля можно представить как убыль
потенциальной
энергии точки, т. е. А12
= U1
– U2
= –U.
Это относится и к элементарному
перемещению
![]() :А
= –dU,
или
:А
= –dU,
или
![]() .
(4.4) Учитывая, что
.
(4.4) Учитывая, что![]() ,
гдеds
— элементарный путь, тогда перепишем
уравнение (4.4) в виде
,
гдеds
— элементарный путь, тогда перепишем
уравнение (4.4) в виде
![]() ,
,
где –dU
— это убыль потенциальной энергии в
направлении перемещения
![]() .
Отсюда
.
Отсюда
![]() ,
(4.5)
,
(4.5)
т.е. проекция
силы поля-вектора
![]() в данной точке на направление перемещения
в данной точке на направление перемещения![]() равн
равн а
с обратным знаком производной потенциальной
энергииU
по данному направлению. Символ частной
производной
подчеркивает, что производная берется
по определенному
направлению между
отдельными точками поверхности
целлюлозного волокна.
а
с обратным знаком производной потенциальной
энергииU
по данному направлению. Символ частной
производной
подчеркивает, что производная берется
по определенному
направлению между
отдельными точками поверхности
целлюлозного волокна.
Перемещение
![]() можно взять в любом направлении, в
частности вдоль координат осей х, у, z.
Например, если перемещение
можно взять в любом направлении, в
частности вдоль координат осей х, у, z.
Например, если перемещение![]() ,
параллельно оси х, то его можно представить
так:
,
параллельно оси х, то его можно представить
так:![]() гдеi —
орт оси x;
dx —
приращение координаты x. Тогда работа
силы
гдеi —
орт оси x;
dx —
приращение координаты x. Тогда работа
силы
![]() на перемещении
на перемещении![]() ,
параллельном оси x,
,
параллельном оси x,
![]()
где Fx
— проекция вектора
![]() на орт
на орт![]() ,
а не на перемещение
,
а не на перемещение![]() ,
как в случаеFs.
,
как в случаеFs.
Подставив последнее выражение в уравнение (4.4), получим
![]() ,
,
где символ частной производной означает, что потенциальная энергия U(x,y,z) при дифференцировании необходимо рассматривать как функцию одного аргумента х, остальные же аргументы должны оставаться при этом постоянными. Ясно, что для проекций Fy и Fz уравнения рассматриваются аналогично уравнению для Fx. [16]
Выше сказанное позволяет моделировать напряженно-деформированное состояние в волокнистой структуре (рис. 4.8) с использованием итерационного алгоритма Папковича-Найбера.
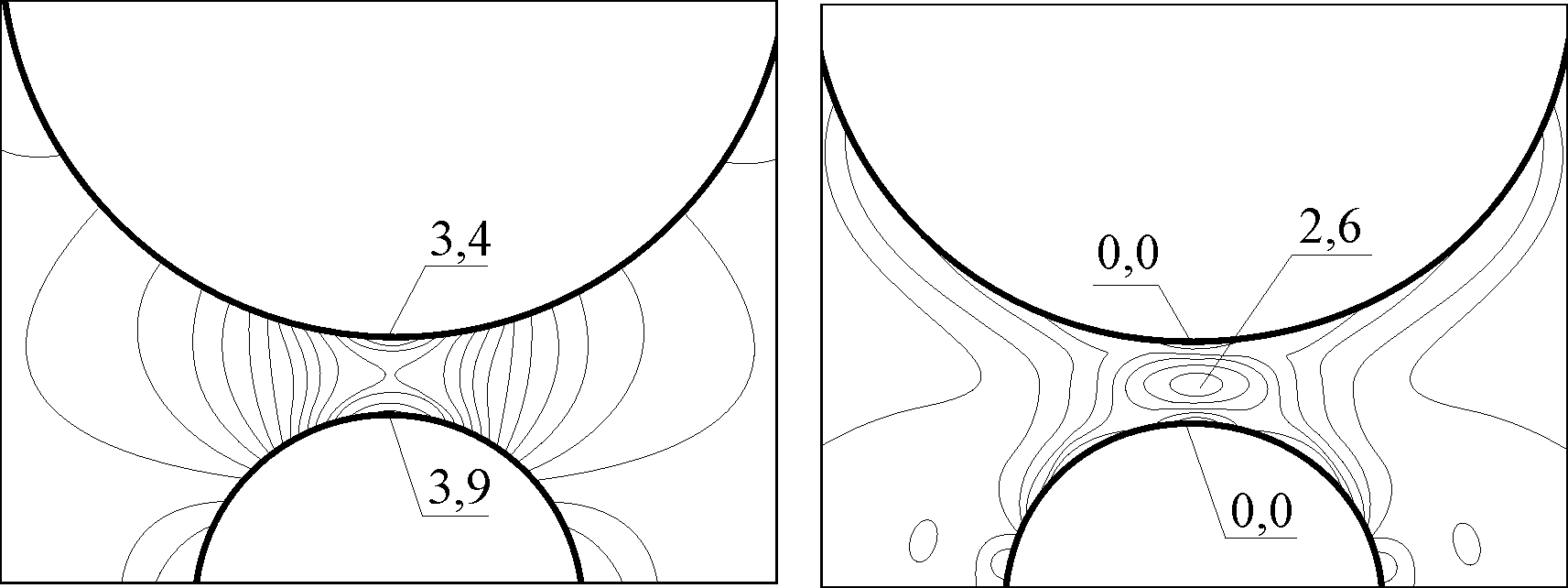
а б
Рис. 4.8. Распределение гидростатических полей напряжений (а) и их интенсивности (б)
Метод заключается в представлении
энергии взаимодействия Ui(n)
путем перемещения чере з
гармонические потенциалыφ0i,
φ1i,
φ2i,
φ3i,
в которых вектор Ui
имеет вид
з
гармонические потенциалыφ0i,
φ1i,
φ2i,
φ3i,
в которых вектор Ui
имеет вид
 ,
,
где е1, е2, е3, — базисные векторы прямоугольной Декартовой системы координат;
μ — модуль сдвига;
ν — коэффициент Пуассона;
φ0i, φ1i, φ2i, φ3i — потенциалы (скалярные функции);
r — радиус-вектор точки среды;
ri — радиус-вектор точки, лежащей внутри i-го включения. [15]