

Синтез структуры регулятора
Структурная схема регулирования представлена на Рис. 5 .8. Система имеет два канала управления: модулем вектора потокосцепления и угловой скоростью ротора. Двухканальная система управления дает возможность осуществить независимое регулирование модуля вектора потокосцепления ротора и скорости ротора при сохранении прямой пропорциональности между моментом, развиваемым двигателем, и составляющей намагничивающей силы статора, находящейся в квадратуре с волной потокосцепления ротора.
Измерение текущих значений переменных производится в неподвижной системе координат с помощью датчика потока (ДПТ) и датчика тока статора (ДТ). Датчик потока измеряет составляющие ψmx, ψmy в воздушном зазоре двигателя при помощи датчиков Холла, установленных в расточке статора по осям x-y, причем ось х совмещается с магнитной осью обмотки фазы а. Кроме того датчик потока осуществляет преобразование составляющих потокосцепления ротора на основании полученных значений токов. Датчик тока измеряет мгновенные значения токов в трех фазах статора и преобразует их в двух фазную систему переменного тока. Для пересчета переменных из неподвижной системы координат в систему координат, связанную с потокосцеплением ротора, используется вектор-фильтр (ВФ) и координатный преобразователь КП2.
Блок компенсации (БК) осуществляет объединение выходных значений регуляторов тока двух каналов. Координатный преобразователь КП1 осуществляет преобразования составляющих напряжения статора (представленных в осях, жестко связанных с вектором потокосцепления ротора) в составляющие неподвижных осей, которые, в свою очередь, преобразователь фаз (ПФ) трансформирует в трехфазную систему переменных напряжений, используемых для управления амплитудой и частотой автономного инвертора напряжения (АИН) [1, с. 120].
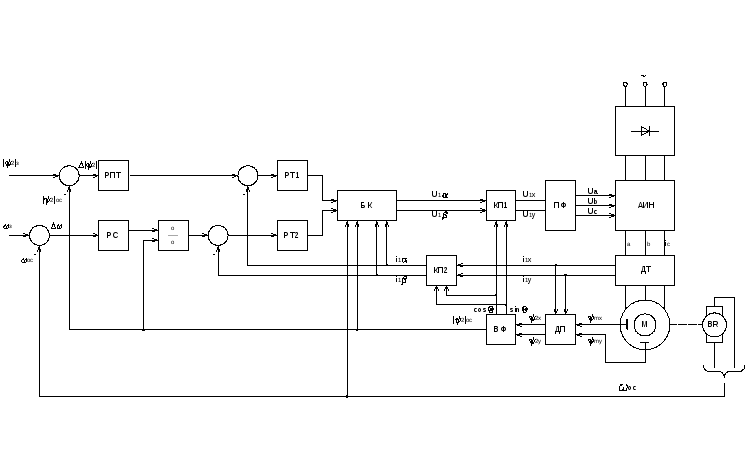
Рис. 5.8 Структура регулирования
В соответствии с рекомендациями [1, с.124] выбираем пропорционально-интегральные регуляторы потока, скорости и тока.
Рассмотрим передаточные функции этих регуляторов. Они будут идентичными и отличаются только значениями коэффициентов Т1 и Т2.
Дискретный аналог
заданной непрерывной функции представлен
на рисунке, где передаточная функция
экстраполятора нулевого порядка:![]() ,
а заданная передаточная функция
регулятора:
,
а заданная передаточная функция
регулятора:![]() .
.
Рис.
5.9
 Дискретный
аналог непрерывной функции
Дискретный
аналог непрерывной функции
Найдем соответствующую
ей дискретную передаточную функцию:
![]()




Для функции вида:
![]() имеем формулу:
имеем формулу:
Для функции
![]() имеем:
имеем:![]()

Получаем:
![]()
Для функции вида:
![]() имеем формулу:
имеем формулу:![]()
Для функции
![]() имеем:
имеем:![]()
![]()
![]()

![]()


![]()
![]()
Перейдем к решетчатой
функции:![]()
Получаем рекуррентное выражение:
![]()
![]()
Соответствующая структура прямого программирования, учитывающая формирование входного сигнала регулятора как разности заданного значения Nз и значения обратной связи Nос, приведена далее. Структура также учитывает ограничение входного и выходного сигналов.
Рис.
5.10
 Структура
прямого программирования регуляторов
Структура
прямого программирования регуляторов
Программное обеспечение
Программное обеспечение микроконтроллера включает в себя следующие основные подпрограммы:
подпрограмма инициализации (после сброса);
подпрограмма вызова расчетов регуляторов по прерыванию от ТС2;
подпрограмма приращения угла по прерыванию от ТС3, задающего скорость вращения двигателя.