

30. Резистивные преобразователи перемещений и скоростей.


 +:
простота конструкции, линейная хар-ка
преобразований, широкий диапазон
измерений.
+:
простота конструкции, линейная хар-ка
преобразований, широкий диапазон
измерений.
-: ухудшение при износе/загрязнении, ограничение по областям применения из-за наличия искрящего подвижного контакта.
 На
основе резистивного преобразователя
перемещений строятся преобразователи
скоростей, поэтому для получения эл.
сигнала, пропорц. скорости перемещения
достаточно продифференцировать выходной
сигнал преобразователя перемещения.
На
основе резистивного преобразователя
перемещений строятся преобразователи
скоростей, поэтому для получения эл.
сигнала, пропорц. скорости перемещения
достаточно продифференцировать выходной
сигнал преобразователя перемещения.
31. Емкостные и и трансформаторные преобразователи перемещений.
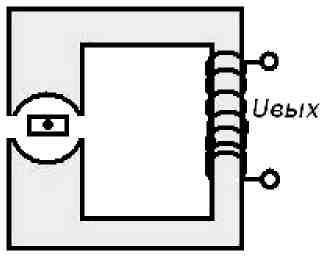
 Трансформаторные
преобразователи перемещений состоят
и: 1) первичная обмотка, 2) магнитопровод,
3) вторичная обмотка, 4) подвижный
сердечник, Ф – магн. поток В зависимости
от положения сердечника изменяется
количество задействованных витков
вторичной (измерительной) обмотки. Чем
меньше витков используется тем меньше
Uвых.
Хар-ка преобразования линейная,
искровзрывобезопасен.
Трансформаторные
преобразователи перемещений состоят
и: 1) первичная обмотка, 2) магнитопровод,
3) вторичная обмотка, 4) подвижный
сердечник, Ф – магн. поток В зависимости
от положения сердечника изменяется
количество задействованных витков
вторичной (измерительной) обмотки. Чем
меньше витков используется тем меньше
Uвых.
Хар-ка преобразования линейная,
искровзрывобезопасен.
 Емкостные
преобразователи перемещений строятся
на основе конденсаторов с подвижными
пластинами или подвижным диэлектриком.
1) линейная хар-ка преобразования 2)
высокая чувствит, малый диапазон
измерений 2) высокая чувствит., погрешность
чем у 2, что обусловлено временной и
температурной нестабильностью параметров
диэлектрика.
Емкостные
преобразователи перемещений строятся
на основе конденсаторов с подвижными
пластинами или подвижным диэлектриком.
1) линейная хар-ка преобразования 2)
высокая чувствит, малый диапазон
измерений 2) высокая чувствит., погрешность
чем у 2, что обусловлено временной и
температурной нестабильностью параметров
диэлектрика.
32. Преобразователи угловых скоростей.
 Преобразователи
с вращающимся постоянным магнитом. При
его вращении в зазорах магнитопровода
изменяется магн. поток, из-за чего в
измерительной обмотке индуцируется
ЭДС, причем от числа оборотов зависит
амплитуда и частота выходного напряжения
это информативные параметры. Измерение
амплитудного или действующего значения
напряжения осущ. технически проще.
Однако, если объект измерения с
преобразователем значительно удален
и передача информации производится по
достаточно длинной линии связи, то
вкач-вн информативного параметра нужно
выбирать частоту, из-за падения напряжения
на линии связи.
Преобразователи
с вращающимся постоянным магнитом. При
его вращении в зазорах магнитопровода
изменяется магн. поток, из-за чего в
измерительной обмотке индуцируется
ЭДС, причем от числа оборотов зависит
амплитуда и частота выходного напряжения
это информативные параметры. Измерение
амплитудного или действующего значения
напряжения осущ. технически проще.
Однако, если объект измерения с
преобразователем значительно удален
и передача информации производится по
достаточно длинной линии связи, то
вкач-вн информативного параметра нужно
выбирать частоту, из-за падения напряжения
на линии связи.
 +:
нет источника питания -: нельзя мерить
малые скорости.
+:
нет источника питания -: нельзя мерить
малые скорости.
Без этих недостатков конструкция с вращ. феромагнитным сердечником. Обмотка переменного возбуждения подключается к источнику переменного напряжения. В измерительной обмотке индуцируется ЭДС, с частотой = напряжению питания, а амплитуда зависит от положения сердечника в зазоре. Информативный параметр – частота огибающей.
33. Индуктивные преобразователи перемещения
 Конструктивно
представляет собой катушку индуктивности
с подвижным сердечником, механически
соединённым с объектом измерения.
Конструктивно
представляет собой катушку индуктивности
с подвижным сердечником, механически
соединённым с объектом измерения.
Сердечник изготовлен из материала с относительной магнитной проницаемостью отличной от 1. Индуктивность катушки зависит от положения сердечника. Следовательно задача измерения перемещения сводится к измерению индуктивности катушки, которое можно произвести любым из ранее рассматриваемых способов.
Достоинства – искро-взрывобезопасность, отсутствие подвижных контактов, подверженных износу и загрязнению.
Недостатки – влияние преобразователя на объект измерения. Т.к. преобразователь конструктивно представляет из себя электромагнит и при изменении его индуктивности на сердечник действует сила, втягивающая его в катушку. Нелинейная характеристика преобразования.