

3. Назначение, классификация, область применения и основные характеристики датчиков угловых и линейных перемещений и размеров.
Преобразователь с вращающимся
п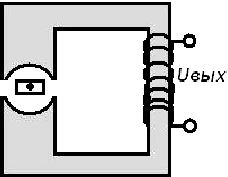 остоянным
магнитом. При вращении
остоянным
магнитом. При вращении
постоянного магнита в зазоре провода в
последнем изменяется магнитный поток. В
следствии чего в обмотке индуцируется ЭДС
![]()
От частоты и скорости вращения
м агнита
зависти не только амплитуда выходного
агнита
зависти не только амплитуда выходного
напряжения, но и его частота. Следовательно и амплитуда и частота
являются информативными параметрами, однозначно связанными со
скоростью вращения.
Измерение амплитудного (действующего) значения напряжения
осуществляется технически проще.
Однако если объект измерения с преобразователем значительно
удалён и передача информации происходит по достаточно длинной линии
связи в качестве информативного параметра целесообразно выбирать
частоту. Это обусловлено тем, что при измерении напряжения неизбежны
потери из-за падения напряжения в линиях связи.
Достоинство – отсутствие источника
питания
Недостаток - невозможность измерения
малых скоростей менее десятков оборотов в мин.
Данного недостатка лишена
конструкция с вращающимся ферромагнитным
сердечником.
В измерительной обмотке индуцируется ЭДС, частота которой такая
же как у напряжения питания, а амплитуда зависит от положения сердечника
в зазоре магнитопровода т.к. оно влияет на величину магнитного
сопротивления магнитопровода.
Билет № 9
1. Автоматическая коррекция погрешностей.
Автокоррекция систематических и прогрессирующих погрешностей
Во время автоматической коррекции необходимо иметь в наличие или создавать величину, с помощью которой можно было бы реализовать корректирующее действие СИ. Этой величиной может быть влияющий фактор, неинформативный параметр входного сигнала или величина, пропорциональная погрешности СИ. Поэтому автоматические методы коррекции для этой группы погрешностей делят на:
методы с использованием разомкнутых структур, в которых корректирующее влияние создаётся влияющим фактором z и (или) неинформативным параметром входного сигнала Pk (рис. 1.1, а).
методы с использованием замкнутых структур, в которых корректирующее влияние создаётся величиной Q, которая пропорциональна погрешности (рис. 1.1, б).
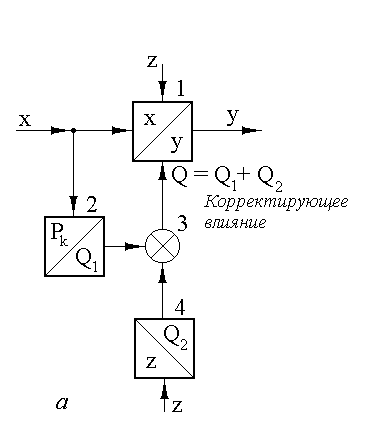
Рисунок 1.1 Коррекция с использованием разомкнутой структуры (а) и замкнутой структуры (б)
Корректирующее влияние может создаваться по принципу обеспечения инвариантности автоматической коррекции за счёт введения дополнительного канала или дополнительного цикла преобразования, используя пространственное или временное разделение. Структурные методы автоматической коррекции как с пространственным, так и с временным разделением делятся по способу введения сформированного корректирующего влияния в основной канал на аддитивные и мультипликативные.
Автоматическая аддитивная коррекция выполняется путём прибавления к выходной или входной величине, пропорциональной погрешности, которая образуется автоматически в корректирующем преобразователе. При аддитивных методах наиболее удобно корректировать мгновенные значения сигналов, потому что звенья, которые выполняют аддитивную коррекцию, обладают большой скоростью.
Автоматическая мультипликативная коррекция осуществляется изменением коэффициента преобразования измерительного преобразователя корректирующей величиной, которая пропорциональна погрешности. При этом используются звенья умножения или управляющие звенья. Мультипликативную коррекцию наиболее удобно использовать в измерительных преобразователях интегральных значений величин, которые медленно изменяются.