

Функции модели
Временные булевы функция выходов модели команды:
а) Неявная параметрическая форма относительно параметра времени t:
yz = Fz(xz) = Fz xz: yz = D(mz)xz = Dmzxz yz = Dmzxz – функция выхода yz;
основная функция передачи управления (потенциальной модели команды Z),
где Fz = D(mz) = Dmz – функциональный объект модели команды Z;
общее обозначение и его конкретизация (метрическая потенциальная модель);
Dmz – оператор сдвига (задержки) во времени;
mz = mz – параметр сдвига (величина задержки) во времени;
z
 = xz
& Nyz
= xz
& yz
= xz
& yz
– функция индикации активного
состояния (блока модели) команды:
= xz
& Nyz
= xz
& yz
= xz
& yz
– функция индикации активного
состояния (блока модели) команды:
выход z = uz включен, если (пока) включен вход xz и не включен выход yz.
б) Явная параметрическая форма относительно параметра времени t:
yz(t) = Dtmzxz(t) = xz(t–mz) – разновременные соотношения;
последовательностная функция;
u z(t)
= xz(t)
& Nyz(t)
= xz(t)
& yz(t) –
одновременные соотношения;
z(t)
= xz(t)
& Nyz(t)
= xz(t)
& yz(t) –
одновременные соотношения;
комбинационная логическая функция.
Примечание. Оператор сдвига по параметру времени (оператор задержки):
Dm Dtm – явная и неявная формы записи оператора
(относительно параметра времени t).
Определяющее отношение оператора сдвига:
Dmf Dtm f(t) = f(t–m) – оператор подстановки (сдвинутого значения) пораметра t–m вместо (во все свободные вхождения) параметра t выражения f(t) (одновременные однократные подстановки во все вхождения).
Блок функций аппаратной модели команды
Общее оформление системы (блока) функций модели команды:
БФМК: Блок (система) функций модели команды // Общие обозначения
Заголовок блока (краткий и полный)
FZ = FZ(xz, mz / yz, z) = FZ(xz, mz / yz, z)
// xz, mz – входные параметры блока; yz, z – выходные параметры блока
Описание блока // Заголовок и тело блока
ГИ: Горизонтальное исполнение
FZ(xz, mz / yz, z): (yz = D(mz)xz; z = xz & Nyz)
ВИ: Вертикальное исполнение
FZ(xz, mz / yz, z): FZ(xz, mz / yz, z):
( (
yz = D(mz)xz; yz = Dmzxz;
z = xz & Nyz z = xz & Nyz
) )
Индексация обозначений
БФМК: Блок функций модели команды // Индексированные обозначения
Заголовок (краткий и полный)
FZi = FZi(xzi, mzi / yzi, zi) = FZi(xzi, mzi / yzi, zi)
Описание блока // Заголовок и тело блока
ГИ: Горизонтальное исполнение
FZi(xzi, mzi / yzi, zi): (yzi = D(mzi)xzi; zi = xzi & Nyzi)
ВИ: Вертикальное исполнение
FZi(xzi, mzi / yzi, zi): FZi(xzi, mzi / yzi, zi):
( (
yzi = D(mzi)xzi; yzi = Dmzixzi;
zi = xzi & Nyzi zi = xzi & Nyzi
) )
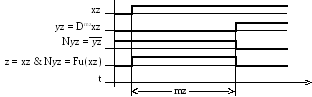
Работа модели
ДИК: Диаграмма исполнения команды / ГИ: Горизонтальное исполнение
Вариант 1: Ступенчатая форма
/ /
/
//
//
//
//
Вариант 2: Линейная форма
/ /
/
//
//
//
// Выход z = uz включен, если (пока) включен вход xz и не включен выход yz.
ДП: Диаграмма последовательностей / ВИ: Вертикальное исполнение
// Стандарт UML
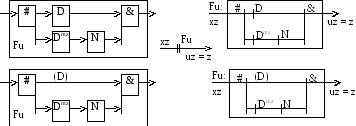
Уточнение функции индикации
Подстановкой выражения yz = Dmzxz получается уточнение содержания исходной функции выхода z индикации состояния (блока модели) команды Z:
z = uz = xz & Nyz = xz & NDmzxz = Dxz & NDmzxz = (Dx & NDmz)xz =
= Fu xz = Fuxz
где:
Fu = Fu = (D & NDmz) = (D #& NDmz) = (D #& NDmz) = #(D, NDmz)&
составной функциональный объект Fu функции z = Fu xz выхода z = uz;
оператор выработки (прямоугольного) сигнала z = uz заданной длительности mz в ответ на ступенчатый сигнал xz;
D = D0 Dt0 – оператор нулевой задержки.
БСО: Блок-схема объекта ШСО: Штрих-схема объекта
/ /
/
//
// // //
//
//
//
Примечание. Определяющее отношение оператора нулевой задержки:
Df(t) = Dt0f(t) = f(t–0) = f(t) D0f = f Df = Rf = f
откуда
D = R – оператор нулевого сдвига эквивалентен простому повторителю
(репитеру с определяющим отношением Rf = f);
оператор эквивалентен простой (непосредственной) связи – отсутствие всякого оператора в линии связи.
Явная (относительно параметра t) форма функции выхода индикации:
z(t) = xz(t) & Nyz(t) = xz(t) & NDtmzxz(t) =
 =xz(t)
& Nxz(t–mz)
= xz(t)
& xz(t–mz)
=xz(t)
& Nxz(t–mz)
= xz(t)
& xz(t–mz)
z (t)
= xz(t)
& Nxz(t–mz)
= xz(t)
& xz(t–mz)
(t)
= xz(t)
& Nxz(t–mz)
= xz(t)
& xz(t–mz)
Анализ:
синтаксис
семантика
прагматика – субъекты (автомат, персонал), присубъекты
Выводы