

Переключательные ациклические структуры алгоритмов
// с условными переходами
Циклические структуры алгоритмов
// традиционные дизъюнктивные циклы
// конъюнктивные циклы
математическаялогика
Логико-временные модели параллельных алгоритмов
Аппаратная реализация алгоритмов и математические модели
2.1.0 Исходные положения
Виртуальная аппаратная реализация алгоритмов
Принимается за основу виртуальная модельная аппаратная реализация структурных схем (блок-схем) параллельных алгоритмов по потоку управления (управление порядком выполнения команд).
// Как будто бы структурные схемы алгоритмов реализуются аппаратно
// Используется метод прямого структурного моделирования
Основные компоненты модельного представления алгоритмов:
блоки на блок-схеме алгоритмов условно представляют некоторые аппаратные блоки;
связи блоков условно представляют линии сигналов передачи управления.
Это обеспечивает возможность точного математического описания модельных структур управления на основе временных булевых функций (функций выходов блоков управления для принятой модельной реализации):
это операторная форма параметрических булевых функций с их интерпретацией в метрической и, на этой основе, в топологической логике времени.
Далее используются простые первичные метрические логико-временные модельные представления параллельных алгоритмов.
Два вида аппаратных моделей
Принимаются два вида моделей по видам сигналов передачи управления:
а) Потенциальные моделиалгоритмов – используются потенциальные сигналы передачи управления ступенчатого типа (с единственным переходом состояний: 01).
1) Основной недостаток:
модели пригодны только для ациклических структур алгоритмов (без контуров и петель) – без обратной связи организации повторной отработки циклов и т.п.
2) Основные достоинства:
простая схемная реализация и простое математическое описание моделей;
обеспечивается строгое обоснование базисных отношений для методов структурного описания и алгебры структурных преобразований алгоритмов.
б) Импульсные модели– используются импульсные сигналы передачи управления (прямоугольного типа – с двумя переходами: 01, 10):
модели пригодны для реализации любых структур алгоритмов, но существенно сложнее в математическом описании.
Далее используются предельно простые потенциальные (метрические) модели управляющих структур параллельных алгоритмов.
Неявные и явные полюсники
Концептуальная модель команды
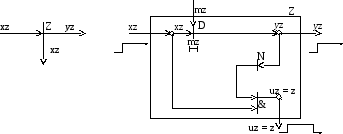
Схема модели команды
Вводится простейшая потенциальная модель команды Z:
явный полюсник сводится к элементу задержки D (Delay), включенному между его полюсами xz, yz цепи передачи управления;
параметр задержки mz определяет длительность исполнения команды.
МПМК: Метрическая потенциальная модель команды
ССО: Структурная схема объекта / ГИ: Горизонтальное исполнение
БСО: Блок схема объекта
Неявный полюсник Явный полюсник
Z mz
xz yz D yz xz
mz

N











& uz = z





uz = z
ШСО: Штрих-схема объекта
 Неявный
полюсник Явный полюсник
Неявный
полюсник Явный полюсник
Сигналы на полюсах модели команды (рисунок 4):
xz = xz – сигнал передачи управления на модуль команды Z из предшествующих цепей потока управления (ступенчатого типа);
yz = yz – сигнал передачи управления от модуля Z в последующие цепи (ступенчатого типа);
uz = z – вспомогательный сигнал индикации рабочего состояния объекта (прямоугольного типа);
может использоваться как сигнал на выполнение команды Z с заданной длительностью команды (для управления исполнительным объектом команды).
Примечание. Обозначения концов связей совпадает с обозначениями соответствующих им полюсов.