

Упрощенная схема замещения асинхронного двигателя.
Полная схема замещения асинхронного двигателя при вращающемся роторе отличается от схемы замещения асинхронного двигателя с заторможенным ротором только наличием в цепи ротора активного сопротивления, зависящего от нагрузки (рис. 1, а). Эту схему замещения называют Т-образной. Следовательно, и в этом случае удается свести теорию асинхронной машины к теории трансформатора.
Т-образная схема замещения асинхронного двигателя
Рис. 1
Сопротивления намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток холостого хода асинхронного двигателя гораздо больше, чем у трансформатора. Если при рассмотрении работы трансформатора часто можно пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной.
Сопротивление r2‘(1 – S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу двигателя, а следовательно, изменению скольжения S.
Г-образная схема замещения асинхронного двигателя
Можно упростить вычисления, преобразовав Т-образную схему замещения в Г-образную, как это показано на рисунке 2, позиции а. Для Г-образной схемы замещения имеем:
![]()
![]()
Г-образная схема замещения асинхронного двигателя
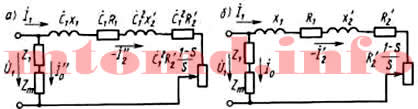
Рис. 2
При анализе электромагнитных процессов в машинах общего применения часто полагают С1≈1, что существенно облегчает расчеты и мало влияет на точность полученных результатов. Г-образную схему замещения при С1 = 1 называют упрощенной схемой замещения с вынесенным намагничивающим контуром (рис. 2, б).
Механическая характеристика ад – зависимость момента от скольжения.
Механическая характеристика АД – зависимость электромагнитного момента М от скольжения при U1=const. M(s) или M(n2).
M~U12 даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента АД.

Точка 0 – идеальный режим (х.х.) М=0, S=0.
Точка Н – номинальный режим М=Мн, S=Sн.
Точка П – точка пуска S=1.
Точка К – критическая точка М=Мm, S=Sk.
Sk≈R’k/xk не зависит от М, а определяется в основном R’a.
Hm≈m1U12P/(2πf1xk) пропорционален U2 и от R2 не зависит.
Характерные точки и участки механической характеристики ад.
См. вопрос 34
Способы регулирования частоты вращения асинхронного привода. Частотное регулирование.
Регулирование частоты вращения АД необходимо – это связано с требованиями оптимизации режимов работы технологического оборудования. Частота вращения АД: n2=n1(1-s)=60f1(1-s)/p.
Три метода регулирования частоты:
1 изменение числа пар полюсов (2р) Ul=var
2 частотное регулирование – изменение частоты питания (n1=var)
3 изменение скольжения (s=var) применяется редко