

76. Навигационные системы отсчета и способы решения навигационных задач
Навигационные системы отсчета.
Местные системы координат, начало которых связывается с Землей, используются в качестве систем отсчета при сравнительно небольших перемещениях, когда кривизной Земли можно пренебречь. Находят широкое применение при счислениях пути на расстояниях порядка десятков и сотен километров.
Глобальные системы координат жестко связаны с Землей и применяются для навигации, охватывающей всю земную поверхность или значительную её часть. Наиболее распространенными являются: географическая (или геодезическая), геоцентрическая, а также левая и правая ортодромическая системы координат.
Космическая система координат используется в спутниковых радионавигационных системах (СРНС). Она является пространственной прямолинейной системой координат OXYZ, начало которой связано с центром Земли.
Например, угломерно-дальномерной системе соответствует полярная система координат; разностно-дальномерной - гиперболическая система координат с фокусами в местах расположения наземных станций.
В географической системе координат в качестве формы Земли принимают эллипсоид вращения. Положение точек на поверхности эллипсоида вращения определяется географической широтой В и географической долготой L (рис. 3). Географической широтой точки С называется угол между нормалью к поверхности эллипсоида в этой точке и плоскостью экватора. Географической долготой называется двугранный угол, заключенный между плоскостями начального меридиана и меридиана данной точки. Поверхность эллипсоида вращения имеет строгое математическое описание и позволяет вывести формулы, необходимые для решения задач воздушной навигации. Однако основные аналитические зависимости при этом оказываются сложными и практически могут быть реализованы только с использованием БЦВМ, но не с помощью аналоговых вычислителей. В ряде случаев это вынуждает прибегать к упрощению модели поверхности Земли.
В геоцентрической (сферической) системе координат Земля принимается за шар, радиус которого равен: R = 6371110 м. Эта система координат отличается от географической только способом отсчета широты. Отсчет геоцентрической широты (φ) производится между плоскостью экватора и направлением радиус-вектора (рис. 4). Способ отсчета геоцентрической долготы (λ) совпадает со способом отсчета географической долготы.
Для районов Земли, удаленных от экватора, применяют произвольную сферическую систему координат, называемую ортодромической (рисунок 5).
Ось X направлена на север вдоль географического меридиана, проходящего через начало координат (т.О). Ось Y направлена на восток по дуге большого круга и является условным экватором (ортодромическим экватором).
Место положения ЛА в точке С определяется в виде длины дуги Хс и длины дуги Ус условных меридиана и параллели, проходящих через точку С. ∆ - угол сходимости меридианов.
Способы решения навигационных задач
1) Способы определения местоположения ла.
Для определения местоположения ЛА в навигации применяются различные способы, которые можно разделить на три группы:
а) Обзорно - сравнительный способ (визуальная ориентировка; сравнение телевизионных, радиотепловых, радиолокационных и других изображений местности с соответствующими картами).
Недостатки способа:
- невозможность в ряде случаев определения места ЛА в плохих метеоусловиях и безориентированной местности (море, пустыня, тайга и т.п.);
- трудность полной автоматизации, и, вследствие этого, необходимость участия оператора;
- демаскировка ЛА в случае применения РЛС и других визирных систем с излучением.
б) Способ линий (поверхностей) положения с использованием радиотехнических и т.п. систем. Основан на определении местоположения ЛА путем засечек, т.е. линий положения относительно известных ориентиров.
Линией положения называется геометрическое место точек на поверхности, соответствующих одному значению навигационного параметра (расстояние, сумма или разность расстояний, угол, скорость полета ЛА и т.п.). Навигационные параметры являются функцией от координат местоположения ЛА.
Линией положения ЛА при пеленгации наземных радиостанций с использованием бортового радиопеленгатора является линия равных пеленгов. На плоскости это прямая, проходящая через точку расположения радиомаяка, на сфере это дуга большого круга - ортодромия (рис. 7).
Способы полета ЛА по заданной траектории.
Для обеспечения полета ЛА по заданной траектории необходимо непрерывно или дискретно управлять его движением. Различают следующие способы вывода ЛА в заданную точку:
- маршрутный (траекторный);
- путевой;
- курсовой.
При маршрутном способе задача навигации решается с использованием ортодромической системы координат, одной из осей которой служит линия заданного пути (рис. 10). Для осуществления управления полетом этим способом необходимо знать линейное боковое уклонение - Z ЛА от маршрута (или его производную dZ/dt), оставшееся расстояние - S и назначенное время выхода в заданную точку - ТH.
Задача управления ЛА сводится к выполнению следующих отношений:
Z = 0; (dZ/dt=0); и VПФ = VTP; где VTP = |dS/dt| - требуемое значение путевой скорости; VПФ – её фактическое значение.
Достоинством способа является высокая точность полета по заданной траектории. Недостатком является то, что между параметрами управления движением ЛА по маршруту и курсом полета отсутствует прямая связь.
Маршрутный способ применяется при ведении разведки, осуществлении посадки по курсоглиссадным радиомаякам, в системах РСБН и РСДН.
При путевом способе задача навигации решается в подвижной полярной системе координат, начало которой (точка 0) совпадает с центром масс ЛА, а полярной осью является линия, соединяющая точку 0 с заданной точкой О1 (рис. 11), где ЗПУ - заданный путевой угол. При угле рассогласования ∆ = 0, полет ЛА происходит по кратчайшему расстоянию, если ∆≠0 (|∆|<π/2), то полет происходит по логарифмической спирали на плоскости.
Путевой способ широко применяется на практике, когда известны координаты местонахождения ЛА и заданной точки, а также курс и угол сноса. При известных координатах ЛА можно определить расстояние S и ЗПУ и найти величину ∆ = ЗПУ - ИК - α.
Зная назначенное время выхода ЛА в заданную точку - ТН, можно определить, при полете с постоянной скоростью, требуемое значение путевой скорости: VпТР = S/(TH-T), где Т - текущее время.
Достоинством способа является возможность выхода ЛА на цель по кратчайшему пути в назначенное время, а недостатком - неточное следование по маршруту и выход на цель не строго с заданного направления.
Путевой способ применяется в доплеровских навигационных системах.
Курсовой способ применяется при неизвестных значениях координат, угла сноса и путевой скорости ЛА. Система координат связана с ЛА, причем полярная ось совпадает с продольной осью ЛА (рис. 12). Для выхода в заданную точку необходимо выполнять условие ∆ = const (|∆|<π/2). В этом случае при наличии ветра (W - вектор скорости ветра), траектория полета будет представлять радиодромию, названную так вследствие того, что по такой траектории осуществляется полет на радиостанцию с углом ∆ = 0, например, при пользовании радиокомпаса.
Достоинством способа является его простота. Недостатком - низкая точность полета по заданной траектории и низкая точность вывода в заданную точку.
Определение всех навигационных параметров осуществляется с помощью разнообразных технических средств. В зависимости от первичного источника навигационной информации технические средства делятся на четыре основные группы:
- геотехнические средства, использующие геофизические поля Земли, к которым относятся магнитные компасы, барометрические высотомеры, гироскопические приборы, инерциальные системы и т.п.
- радиотехнические средства, использующие радиосигналы, излучаемые радиотехническими устройствами, к которым относятся дальномерные, угломерные, угломерно-дальномерные, разностно-дальномерные, БРЛС, ДИСС и т.п.
- астрономические средства, использующие световое или радиоизлучение небесных тел, к которым относятся астрокомпасы, секстанты и т.п.
- светотехнические средства, к которым относятся светомаяки и другие искусственные источники света,
77. Гониометрическая система АРК
Гониометрическая система – это бесконтактный преобразователь сигнала.
Состоит из двух взаимно-перпендикулярных рамочных антенн, плоскость одной из которых совпадает с продольной осью самолета, а плоскость второй перпендикулярна первой, и гониометра состоящего из двух взаимно-перпендикулярных полевых, соединенных с рамочными антеннами, и искательной катушек.

I и II – полевые катушки гониометра
III – искательная катушка гониометра
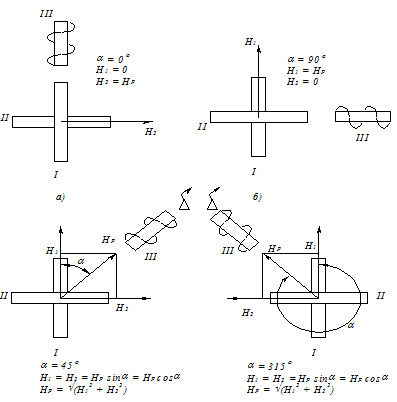
Искательная катушка – это обмотка, лежащая в плоскости оси гониометра. Напряжение на ее зажимах определяется ориентацией этой катушки относительно результирующего вектора поля HР в пространстве полевых обмоток гониометра, так же как ЭДС на зажимах обмотки рамки зависит от ориентации последней относительно результирующего вектора электромагнитного поля радиостанции
78. Радиодевиация
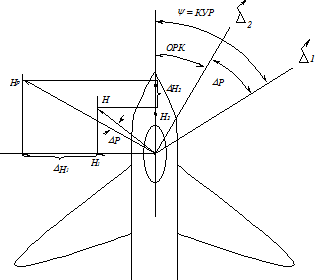
Ошибка в измерении направления на радиостанцию, вызываемая действием вторичного поля от металлического фюзеляжа самолета, называется радиодевиацией.
P = КУР – ОРК, где Р – радиодевиация;
КУР – курсовой угол радиостанции;
ОРК – отсчет радиокомпаса.
Радиокомпас работает в диапазоне 150 – 1 300 кГц, т.е. длина волны 2 000 – 230 м, поэтому отраженный сигнал от поверхности самолета (вторичное поле) по фазе практически совпадает с полем приходящей волны. Для компенсации ошибок, возникающих от радиодевиации, рамочные антенны выполняются различными по действующей высоте (hд). Продольная рамка имеет меньшую действующую высоту, за счет размеров ферритового сердечника на котором размещены обмотки. За счет разных hд вводится поправка, т.е. ошибку уменьшаем до величин менее 15 – остаточная девиация, которая затем компенсируется механическим компенсатором.