

6 Вопрос
Равноускоренное движение — движение, при котором ненулевой вектор ускорения остаётся неизменным по модулю и направлению.
Примером
такого движения является движение тела,
брошенного под углом ![]() к
горизонту в однородном поле силы
тяжести — тело движется с постоянным
ускорением
к
горизонту в однородном поле силы
тяжести — тело движется с постоянным
ускорением ![]() ,
направленным вертикально вниз.
,
направленным вертикально вниз.
При равноускоренном движении по прямой скорость тела определяется формулой:
![]()
Зная,
что ![]() ,
найдём формулу для определения координаты
x:
,
найдём формулу для определения координаты
x:
![]()
Примечание. Равнозамедленным можно
назвать движение, при котором модуль
скорости равномерно уменьшается со
временем (если вектора ![]() и
и ![]() противонаправлены).
Равнозамедленное движение также является
равноускоренным.
противонаправлены).
Равнозамедленное движение также является
равноускоренным.
Перемещение в случае одномерного равноускоренного движения
В случае одномерного равноускоренного движения вдоль координаты x имеет место формула:
![]() ,
,
Скорость
Для характеристики движения материальной точки вводится векторная величина — скорость, которой определяется как быстрота движения, так и его направление в данный момент времени.
Пусть материальная точка движется по какой-либо криволинейной траектории так, что в момент времени t ей соответствует радиус-вектор г0 (рис. 3). В течение малого промежутка времени Dt точка пройдет путь Ds и получит элементарное (бесконечно малое) перемещение Dг.
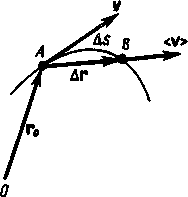
Рис. 3
Вектором средней скорости <v> называется отношение приращения Dг радиуса-вектора точки к промежутку времени Dt:
(2.1)
Направление вектора средней скорости совпадает с направлением Dг. При неограниченном уменьшении Dt средняя скорость стремится к предельному значению, которое называется мгновенной скоростью v:
Мгновенная скорость v, таким образом, есть векторная величина, равная первой производной радиуса-вектора движущейся точки по времени. Так как секущая совпадает с касательной, то вектор скорости v направлен по касательной к траектории в сторону движения (рис. 3). По мере уменьшения Dt путь Ds все больше будет приближаться к |Dг|, поэтому модуль мгновенной скорости

Таким образом, модуль мгновенной скорости равен первой производной пути по времени:
 (2.2)
(2.2)
При неравномерном движении модуль мгновенной скорости с течением времени изменяется. В данном случае пользуются скалярной величиной <v> — средней скоростью неравномерного движения:
Из рис. 3 вытекает, что <v> > |<r>|, так как Ds >|Dг|, и только в случае прямолинейного движения
![]()
Если выражение ds=vdt (см. формулу (2.2)) проинтегрировать по времени в пределах от t до t+Dt, то найдем длину пути, пройденного точкой за время Dt:
(2.3)
В случае равномерного движения числовое значение мгновенной скорости постоянно; тогда выражение (2.3) примет вид
Длина пути, пройденного точкой за промежуток времени от t\ до fa, дается интегралом
Ускорение и его составляющие
Ускорение – характеризует быстроту изменения скорости по величине и направлению.
-
полное ускорение = геометрической сумме
(векторной) нормального и тангенсуального
ускорения.
=а![]() +а
+а![]()
Рассмотрим плоское движение, т. е. движение, при котором все участки траектории точки лежат в одной плоскости. Пусть вектор v задает скорость точки А в момент времени t. За время Dt движущаяся точка перешла в положение В и приобрела скорость, отличную от v как по модулю, так и направлению и равную v1 = v + Dv. Перенесем вектор v1 в точку А и найдем Dv (рис. 4).
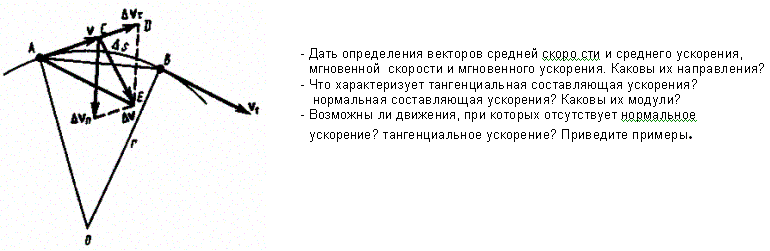
Рис. 4
Средним ускорением неравномерного движения в интервале от t до t+Dr называется векторная величина, равная отношению изменения скорости Ду к интервалу времени Dг:

Мгиовеивым ускорением а (ускорением) материальной точки в момент време ни t будет предел среднего ускорения:

Таким образом, ускорение а есть векторная величина, равная первой производной скорости по времени.
Разложим
вектор Dv
на две составляющие. Для этого из точки
А
(рис.
4) по направлению скорости v
отложим вектор
 ,
по
модулю равный v1.
Очевидно, что вектор
,
по
модулю равный v1.
Очевидно, что вектор
 ,
равный
Dvt,
определяет изменение скорости за время
Dt
по
модулю: Dvt
= v1
- v.
Вторая
же составляющая Dvn
вектора Dv
характеризует изменение скорости за
время Dt
по
направлению.
,
равный
Dvt,
определяет изменение скорости за время
Dt
по
модулю: Dvt
= v1
- v.
Вторая
же составляющая Dvn
вектора Dv
характеризует изменение скорости за
время Dt
по
направлению.
Тангенциальная составляющая ускорения – составляющая полного ускорения тела криволинейного движения материальной точки, которая характеризует численное изменение скорости и направленно по касательной в сторону отправления движения.
- нормальное и тангенсуальное ускорение взаимоперпендикулярны.
т. е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю.
Найдем
вторую составляющую ускорения. Допустим,
что точка В
достаточно
близка к точке А,
поэтому
Ds
можно считать дугой окружности некоторого
радиуса г, мало отличающейся от хорды
АВ.
Тогда
из подобия треугольников АОВ
и
EAD
следует
 ,
но
так как AB=vDt,
то
,
но
так как AB=vDt,
то
В пределе при Dt ® 0 получим v1 ® v.
Поскольку v1 = v, угол EAD стремится к нулю, а так как треугольник EAD равнобедренный, то угол ADE между v и Dvn стремится к прямому. Следовательно, при Dt ® 0 векторы Dvn и v оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории, то вектор Dvn, перпендикулярный вектору скорости, направлен к центру ее кривизны. Вторая составляющая ускорения, равная
называется нормальной составляющей ускорения (составляющая полного ускорения тела (центростремительного) криволинейного движения материальной точки, которая характеризует быстроту изменения скорости по направлению и направлена по главной нормали траектории движения в сторону центра кривизны) поэтому ее называют также центростремительным ускорением). Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис. 5):
Формула пути при равномерном движении.. Скоростью равномерного прямолинейного движения называют векторную величину, равную отношению перемещения тела к промежутку времени, в течение которого было совершено это перемещение: v=s/t.
Формула перемещения при равноускоренном движении используется при доказательстве теоремы о кинетической энергии. Для этого необходимо перенести ускорение в левую часть и домножить обе части на массу тела:
![]() .
.
Записав аналогичные соотношения для координат y и z и просуммировав все три равенства получим соотношение:
![]() .
.
Слева
стоит работа постоянной равнодействующей силы ![]() ,
а справа — разность кинетических
энергий в
конечный и начальный момент движения.
,
а справа — разность кинетических
энергий в
конечный и начальный момент движения.