

-
Описание применяемых методов.
-
Вычисление координат точек при аксонометрическом проецировании.
Инициализация.
-
Задаем координаты точки T.
-
Задаем координаты камеры, то есть точки C.
-
Получаем смещение Cx, Cy центра окна отображения.
-
Поворот системы координат на угол ψ вокруг оси X:
Для этого нужно:
-
Рассчитать угол поворота φ вокруг оси X:
Если (a
= 0 и b
= 0), то cosφ
= 1 и sinφ
= 0, иначе
![]() и
и
![]() .
.
Результирующая матрица поворота вокруг оси Х:

-
Рассчитать угол поворота ψ вокруг оси:
-
Если (a = 0 и b = 0 и c = 0), то cosψ = 1 и sinψ = 0, иначе
![]() и
и
![]() .
.
Результирующая матрица поворота вокруг оси Х:

-
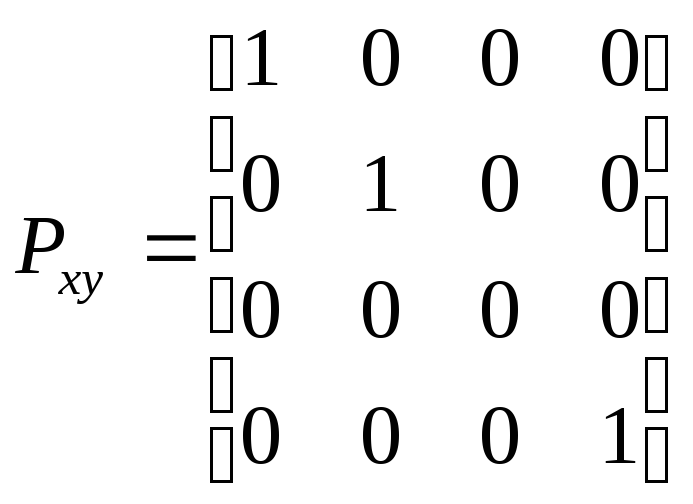
Проецирование на плоскость xOy:
Результирующая матрица проецирования на плоскость xOy:
Осуществить операцию умножения координат точки Т и ее проекций на транспонированные матрицы полученные на этапах 1), 2), 3) проецирования.
Приведение координаты точки Т и ее проекций к экранным.
Рассмотрим данную операцию для точки Т (для проекций будет аналогично).
X’ = X + Сx;
Y’ = Y + Сy.
/*Имеются трехмерные координаты точек T, Т1, Т2, Т3, Tx, Ty, Tz, C, xu, xd, yu, yd, zu, zd, где Т1, Т2, Т3, Tx, Ty, Tz – проекции точки Т, С – камера, а остальные точки используются при рисовании осей. Все эти точки мы поместим в массив: Точки типа Точка, который в свою содержит поля для хранения координат.*/
// А – матрица проецирования
//ТочкиВид – этот массив будет содержать результирующие видовые координаты точек.
нач
Матрица.Новая() //«загоняем» в А единичную матрицу
Матрица.Повернуть(Точка C) //Функция состоящая из 2-x последовательных аффинных преобразований, необходимых для поворота к камере
//Преобразуем в новые точки
нц от i:=0 до Точки.Длина
ТочкиВид[i] := Точки[i] * Матрица
кц
кон
На данном этапе мы получаем видовые координаты необходимые для изображения при аксонометрическом преобразовании.
-
Вычисление координат точек при перспективном проецировании.
Чтобы вычислить координаты точек при перспективном преобразовании, нужно взять точки, полученные после преобразования (умножение на матрицу поворота) и провести следующие манипуляции:
-
Высчитываем значение переменной:
![]()
-
Далее для каждой точки:
 ;
;
 .
.
/*Имеются трехмерные координаты точек T, Т1, Т2, Т3, Tx, Ty, Tz, C, xu, xd, yu, yd, zu, zd, где Т1, Т2, Т3, Tx, Ty, Tz – проекции точки Т, С – камера, а остальные точки используются при рисовании осей. Все эти точки мы поместим в массив: Точки типа Точка, который в свою содержит поля для хранения координат.*/
// А – матрица проецирования
//ТочкиВид – этот массив будет содержать результирующие видовые координаты точек.
нач
Матрица.Новая() //«загоняем» в А единичную матрицу
Матрица.Повернуть(Точка C) //Функция состоящая из 2-x последовательных аффинных преобразований, необходимых для поворота к камере
//Преобразуем в новые точки
нц от i:=0 до Точки.Длина
ТочкиВид[i] := Точки[i] * Матрица
кц
d = кореньиз(C.X*С.Х+C.Y*C.Y+C.Z*C.Z)
//Преобразуем в новые точки(перспективные)
нц от i:=0 до ТочкиВид.Длина
если (d-ТочкиВид[i].Z) > 1
нач
ТочкиВид[i].X:=ТочкиВид[i].X*(d/(d-ТочкиВид[i].Z))
ТочкиВид[i].Y:=ТочкиВид[i].Y*(d/(d-ТочкиВид[i].Z))
кон
иначе
нач
ТочкиВид[i].X:=ТочкиВид[i].X*d
ТочкиВид[i].Y:=ТочкиВид[i].Y*d
кон
кц
кон
И вот тут-то мы можем использовать полученные точки для прорисовки. Прорисовка уже освещалась в первой лабораторной работе, стоит добавить лишь проверку на выход элементов чертежа за границу и расположение камеры внутри объекта, выводя соответствующие сообщения:
если (P.x>C.x и P.y>C.y и P.z>C.z)
состояние=камера внутри
если (X<0 или Х>ширина_области или Y<0 или Y>высота_области)
состояние=выход за границы