

27. Доказательство принципа максимума было проведено без учета ограничений на вектор состояния. Рассмотрим теперь следующую постановку задача. Дана автономная динамическая система
 ,
,
,
,
 ,
,
,
,
где
- вектор
,
- вектор
,
- вектор-функция
,
а множество
задано в виде
 ,
где
,
где
![]() - вектор-функция
- вектор-функция
 ,
причем
,
причем
 .
.
Рассмотрим задачу Лагранжа при свободном :
 .
.
Исследуем оптимальные траектории, которые можно разбить на конечное число участков, каждый из которых лежит либо на границе множества , либо внутри него (рис. 3.6).
Пусть
дуга
 траектории полностью лежит на границе
,
а управляемая система автономна. Чтобы
принадлежала границе, необходимо и
достаточно, чтобы
траектории полностью лежит на границе
,
а управляемая система автономна. Чтобы
принадлежала границе, необходимо и
достаточно, чтобы
 ,
(3.81)
,
(3.81)
т.е.
вектор фазовой скорости
должен быть ортогонален нормали к
поверхности
 .
Здесь
.
Здесь
 - вектор размерности
,
.
- вектор размерности
,
.
Введем
в рассмотрение расширенный вектор
 ,
где
,
где
 ,
,
 .
Тогда задача Лагранжа принимает частный
вид задачи Майера:
.
Тогда задача Лагранжа принимает частный
вид задачи Майера:
 ,
,
,
,
,
,
 ,
,
. (3.82)
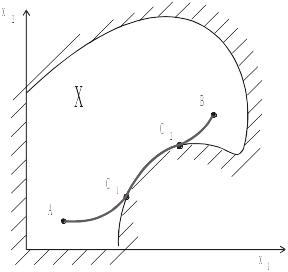
Рис. 3.6. Оптимальная траектория с учетом ограничений на фазовые координаты
Получим
необходимые условия оптимальности.
Пусть известно оптимальное управление
.
Дадим оптимальному управлению
игольчатую вариацию при
 .
Вариация траектории при
.
Вариация траектории при
 определяется из уравнения
определяется из уравнения
 (3.83)
(3.83)
с
начальным условием
 .
.
Связь
вариаций
 и
определим, продифференцировав уравнение
:
и
определим, продифференцировав уравнение
:
 .
(3.84)
.
(3.84)
Исключим
из уравнения для вариации траектории.
Умножим последнее уравнение слева на
некоторую матрицу

 и прибавим к уравнению для вариации
траектории:
и прибавим к уравнению для вариации
траектории:
 .
(3.85)
.
(3.85)
Потребуем,
чтобы матрица
обеспечивала равенство
 для всех
для всех
 .
.
Тогда
 .
(3.86)
.
(3.86)
Введем вектор , такой, чтобы
 (3.87)
(3.87)
для всех . Отсюда следует, что при
,
 .
(3.88)
.
(3.88)
Дифференцируя
(3.87) по времени и учитывая выражение для
производной
 (3.86), получим следующее уравнение для
сопряженных множителей
(3.86), получим следующее уравнение для
сопряженных множителей
 .
(3.89)
.
(3.89)
Определив
вектор
согласно последним выражениям и введя
функцию Гамильтона
 ,
получим для момента
,
получим для момента

 ,
,
или
 ,
(3.90)
,
(3.90)
где
 ,
,
 соответствует оптимальному режиму.
соответствует оптимальному режиму.
Так
как
может быть любым из
,
то окончательно
 для всех
.
для всех
.
Каноническая система уравнений имеет вид
 ,
,
 ,
,
 ,
(3.91)
,
(3.91)
 ,
,
 .
.
Кроме
того, должно выполняться условие
 .
.
Определим матрицу . По условию
.
Пусть
 и
и
 - составляющие вектора
,
такие, что
имеет размеры
,
а
-
- составляющие вектора
,
такие, что
имеет размеры
,
а
-
 ,
а матрица
,
а матрица
 - неособенная с размерами
- неособенная с размерами
 .
Вариации
и
связаны
соотношениями
.
Вариации
и
связаны
соотношениями
 :
.
:
.
Поэтому
 компонентов
,
например,
компонентов
,
например,
 ,
можно считать свободными. Зададим
,
можно считать свободными. Зададим
 ,
тогда
,
тогда

 .
(3.92)
.
(3.92)
Следовательно, достаточно задать следующим образом:
 .
(3.93)
.
(3.93)
Таким образом, для рассматриваемой задачи необходимые условия оптимальности и имеют вид
1.  ,
,
 ,
,
 ,
(3.94)
,
(3.94)
,
 ,
,
где
 ,
- вектор, составленный из любых
компонентов вектора
,
таких, что матрица
неособенная,
- размерность вектора
.
,
- вектор, составленный из любых
компонентов вектора
,
таких, что матрица
неособенная,
- размерность вектора
.
2.  для всех
,
для всех
,
при
условии
 .
.
3.  ,
если
фиксировано,
,
если
фиксировано,
 ,
если
свободно для всех
.
,
если
свободно для всех
.
Можно получить обобщения на другие случаи, в частности, для неавтономной системы.
Перейдем теперь к общему случаю. Оптимальная траектория обладает тем свойством, что каждый участок является оптимальным в смысле исходного критерия, а значит, на нем выполняются необходимые условия оптимальности. Это значит, что для участков, лежащих внутри области X имеет место принцип максимума в форме соотношений (3.16 – 3.18).
Получим теперь условия стыковки участков оптимальной траектории. Предположим, что оптимальная траектория состоит из конечного числа участков, каждый из которых лежит либо внутри области , либо на ее границе .
На
любом участке оптимальной траектории
выполняются необходимые условия
оптимальности. Определим условия,
которым должна удовлетворять оптимальная
траектория в точках стыка участков,
т.е. при переходе от одного участка к
другому. Рассмотрим переход от i-го
участка, лежащего внутри допустимой
области, на (i+1)-й участок,
лежащий на ее границе, т.е. отрезок
времени
 ,
где
,
где
 - сколь угодно малая величина, а
- сколь угодно малая величина, а
 - момент входа оптимальной траектории
на участок границы
,
описываемый уравнением
.
- момент входа оптимальной траектории
на участок границы
,
описываемый уравнением
.
Для
рассматриваемого бесконечно малого
участка оптимальной траектории
 справедливы соотношения, связывающие
величины до момента
и после него [2]:
справедливы соотношения, связывающие
величины до момента
и после него [2]:
 ,
(3.95)
,
(3.95)
 ,
(3.96)
,
(3.96)
где - вектор размерности . Эти соотношения называются условиями скачка.
Таким образом, если оптимальная траектория существует и содержит конечное число точек стыка, то каждый участок, лежащий внутри допустимой области , удовлетворяет принципу максимума без ограничений на фазовый вектор, каждый участок, лежащий на границе, удовлетворяет принципу максимума с ограничениями на фазовый вектор, а в каждой точке стыка выполняются условия скачка гамильтониана и сопряженных переменных.
28. В основе метода динамического программирования лежит принцип оптимальности, сформулированный Р.Беллманом. Одна из формулировок этого принципа звучит так: оптимальный процесс обладает тем свойством, что каким бы ни было начальное управление, последующее управление должно быть оптимальным по отношению к состоянию, происходящему от начального управления.
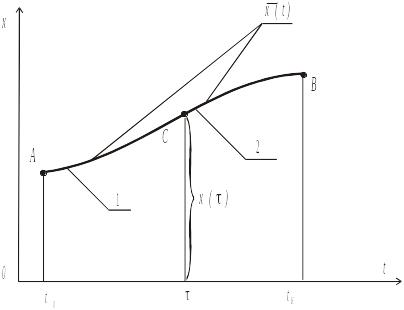
Рис. 4.1. Оптимальная траектория
Предположим,
что
- оптимальная траектория, приводящая
систему из начального состояния
в конечное
,
промежуточное состояние
соответствует моменту времени
 (рис. 4.1). Согласно принципу оптимальности
Беллмана, участок траектории
(рис. 4.1). Согласно принципу оптимальности
Беллмана, участок траектории
 представляет собой оптимальную траекторию
по отношению к его начальному состоянию
представляет собой оптимальную траекторию
по отношению к его начальному состоянию
 ,
т.е. оптимальное управление на участке
не зависит от того, каким образом система
приведена в состояние
.
,
т.е. оптимальное управление на участке
не зависит от того, каким образом система
приведена в состояние
.
Другими словами, каждый участок оптимальной траектории является оптимальной траекторией относительно своей начальной точки, оптимальное управление не зависит от предыстории движения системы и для будущих моментов времени определяется только состоянием в данный момент. Таким образом, всю траекторию движения системы можно разбить на части, двигаясь от ее конца к началу, и оптимизировать движение по частям.
Принцип оптимальности Беллмана дает достаточное условие минимума функционала. Разумеется, он справедлив не для всех классов управляемых процессов, а только для марковских, то есть процессов без предыстории.
Рассмотрим задачу оптимального управления непрерывной динамической системой:
 ,
,
,
,
,
,
,
,
,
,
 .
(4.1)
.
(4.1)
Требуется
синтезировать закон оптимального
управления в форме
 .
.
Пусть
поставленная задача решена. Введем
обозначение:
 - минимальное значение функционала для
участка траектории
- минимальное значение функционала для
участка траектории
 ,
тогда
,
тогда
 - есть минимальное значение функционала
для измененного относительно
состояния и времени. Очевидно, что
- есть минимальное значение функционала
для измененного относительно
состояния и времени. Очевидно, что
 .
Тогда в общем случае независимых
изменений состояния и времени получим
в соответствии с принципом оптимальности
Беллмана
.
Тогда в общем случае независимых
изменений состояния и времени получим
в соответствии с принципом оптимальности
Беллмана
 .
(4.2)
.
(4.2)
Введем допущения о том, что функция непрерывна и непрерывно дифференцируема (во многих задачах эти условия не выполняются). Разложим в ряд Тейлора, отбросив малые величины, получим
 .
(4.3)
.
(4.3)
Подставив в предыдущее выражение, получим
 .
.
Разделив
на
 ,
при
,
при
 получим, с учетом того, что
может быть произвольным моментом времени
получим, с учетом того, что
может быть произвольным моментом времени
 .
(4.4)
.
(4.4)
Полученное нелинейное дифференциальное уравнение в частных производных относительно функции называется уравнением Беллмана.
Функция
есть функция текущего состояния системы,
ее принято называть функцией будущих
потерь или функцией Беллмана. Она
является мерой стоимости перехода из
точки с координатами
 в точку с координатами
в точку с координатами
 .
В задаче Больца функция будущих потерь
в конечный момент времени равна
терминальному члену, т.е.
.
В задаче Больца функция будущих потерь
в конечный момент времени равна
терминальному члену, т.е.
 ,
в задаче Лагранжа
,
в задаче Лагранжа
 ,
следовательно,
,
следовательно,
 .
Эти выражения задают граничные условия
для уравнения Беллмана.
.
Эти выражения задают граничные условия
для уравнения Беллмана.