

Системы управления (курсовой проект) / Задание на курсовое проектирование СУ_2015
.pdfгде: - постоянная интегрирования, определяющаяся начальными условиями и возмущением; - корни характеристического уравнения являются комплексными:
|
|
|
|
|
|
|
|
|
, +1 |
= |
± |
|
|
|
|
|
(3) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Каждая пара корней дает в выражении (2) составляющую переходного |
||||||||||||||||||||||
процесса, равную: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Сi e |
i j i t |
Ci 1e |
i j i t |
e |
it |
Ci e |
j it |
Ci 1e |
j it |
/ |
e |
it |
sin it i |
(4) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
||||||||||
|
C |
|
|
|
|
|
|
arctg |
Ci 1 |
. |
|
|
|
|
|
|
|
|
|||||
где: |
|
C 2 |
C 2 |
, |
|
i |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
i |
|
i |
|
i 1 |
|
|
|
|
|
|
Ci |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Как видно соотношение (4) представляет собой синусоиду (частота i) с изменяющейся экспоненциально амплитудой. Если i <0, то составляющая затухает. Если хотя бы одна составляющая из всех n, где n - порядок дифференциальной системы уравнений, будет иметь i >0, система неустойчива. В частном случае, при i =0 , i= i+1=ai переходный процесс носит апериодический характер. В соответствии с этим, для линейных систем будем различать апериодическую и колебательную устойчивость.
Таким образом, суть принятого критерия качества заключается в следующем, чем левее расположен самый правый из комплексных корней (т.е. m отрицательное и максимальное по модулю), тем выше скорость затухания суммарного переходного процесса.
Вернемся к определениям односвязаности и многосвязности системы.
На рис. 5 представлены две одноконтурные структурные схемы регулирования двух разных параметров на некотором, например, тепловом объекте.
а) |
б) |
Рис. 5 Одноконтурные структурные схемы регулирования двух разных параметров.
11
Предположим для схемы на рис.5.а известны передаточная функция (ПФ) разомкнутой системы Wt (s) от регулирующего воздействия D (например, изменение расхода топлива) к регулируемому параметру T (изменение температуры теплоносителя), а также передаточная функция регулятора в обратной связи t (s). Пусть ПФ и закон регулирования будут простейшими:
Wt |
|
|
At |
; |
t k0 , |
т.е. D k0 T . |
(5) |
|
|
||||||
|
sTt |
||||||
|
1 |
|
|
|
|
||
Корень характеристического полинома нерегулируемой системы λ (знаменателя ПФ разомкнутой системы Wt (p)) полностью определен величиной постоянной времени Tt и не может быть изменен:
W |
|
|
At |
p 1 . |
(6) |
|
|
||||
t ( раз) |
1 |
sTt |
Tt |
|
|
|
|
||||
Очевидно, λ имеет отрицательное действительное значение и определяет вид переходного процесса после возмущения как апериодически затухающий по экспоненциальному закону e t . При этом интенсивность затухания зависит от величины λ. Соответственно при замыкании контура регулирования характеристический корень будет определяться из полинома знаменателя замкнутой передаточной функции:
|
|
|
|
|
|
|
|
|
|
|
At |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wt (s) |
|
|
|
|
|
|
|
|
At |
|
|
At |
|
s |
1 Atk0 |
. |
|
||
W |
|
|
|
|
|
|
|
1 sTt |
|
|
|
|
(7) |
||||||||||
t ( зам) |
|
W (s) |
|
|
|
|
1 st Atk |
|
(1 Atk |
|
) sT |
|
|||||||||||
|
1 |
|
(s) |
|
|
|
|
At t (s) |
|
|
|
|
|
Tt |
|
||||||||
|
|
t |
|
|
|
|
0 |
|
0 |
|
|
||||||||||||
|
|
|
|
t |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 sTt |
|
|
|
|
|
|
|
|
|
|
|
|||||
В данном случае, знак и модуль вещественного характеристического корня λ зависят от величины и знака выбранного коэффициента усиления пропорционального регулятора k0. При этом существует однозначная связь: чем больше по модулю отрицательный k0 , тем выше значение функционала качества – степени устойчивости системы. Тем самым представлен простейший пример односвязной системы.
Рассуждения относительно другого автономного (не связанного с первым) контуром регулирования рис.5.б) приводят к аналогичным выводам об односвязности соответствующей ему системы.
Заметим, что при незначительных усложнениях передаточной функции объекта и закона регулирования, при отсутствии взаимного влияния
12
нескольких параметров (или сознательном не учете его) система может сохранять свойство односвязности при управлении или регулировании.
Однако реальные системы управления и их динамические состояния характеризуются вектором взаимозависимых переменных, что часто приводит к противоречивости влияния на них одного и того же управляющего воздействия.
Рассмотрим более реальный пример регулирования рассмотренного теплового объекта, когда учитывается взаимное влияние выходных параметров T (изменение температуры теплоносителя) и P (изменение давления теплоносителя). На рисунке 6 представлен регулируемый объект с параллельным воздействием двух контуров.
Рис.6 Регулируемый объект с параллельным воздействием двух контуров Двухконтурную схему (рис.6) можно представить в виде
одноконтурной (рис.7).
13

Рис.7 – Неявное представление внутренних контуров в системе
При этом |
Wtз |
|
|
Wt |
. |
|
Wt t |
||||
|
|
1 |
|
||
Если в системе управления имеется несколько замкнутых контуров с более сложными законами регулирования, например пропорционально –
дифференцирующий, |
D (k0 k1s) T , |
то |
многопараметрический |
|||||||||
характеристический полином включает в качестве искомых настроечных |
||||||||||||
параметров регуляторов несколько пар коэффициентов |
k0i k1i . |
|
|
|
||||||||
Тогда характеристический полином можно записать: |
|
|
|
|||||||||
A s n |
A |
s n 1 f |
n 1 |
(k |
0i |
, k |
) A |
|
s n 2 f |
n 2 |
(k |
k ) ... |
n |
n 1 |
|
|
1i |
n 2 |
|
|
0 1 |
||||
|
|
(8) |
|
|
|
|
|
|
|
|
|
|
Очевидно, установить однозначные зависимости между направлением изменения коэффициентов регуляторов, входящих в выражение (8) нелинейно и критерием – степенью устойчивости в полиноме высокого порядка невозможно. Это утверждение является обоснованием и трактовкой свойства многосвязности систем управления.
Под многосвязностью понимается противоречивое взаимное влияние параметров каждого регулятора и регулирующих воздействий различных регуляторов на критерии качества системы (на динамические свойства, степень устойчивости в нашем случае).
Существуют две основные схемы учета многосвязности:
1.Представление структурно объекта в виде системы с вложенными контурами регулирования, как это предложено в рассмотренном примере
14

(рис.6-7). В более общем виде многосвязную систему с множеством вложенных контуров можно представить следующим образом (рис.8):
Рис.8 Многосвязная система с множеством вложенных контуров Передаточная функция замкнутой по всем контурам системы по
любому из параметров (в частности по ) вычисляется согласно соотношению (9):
Wз |
|
W |
|
. |
(9) |
|
W W WE E |
|
|||
1 |
WU U |
|
|||
Вторая схема представление объекта предполагает структуру многомерного объекта, имеющего несколько входных и несколько выходных
переменных, через частные передаточные функции, отражающие
15
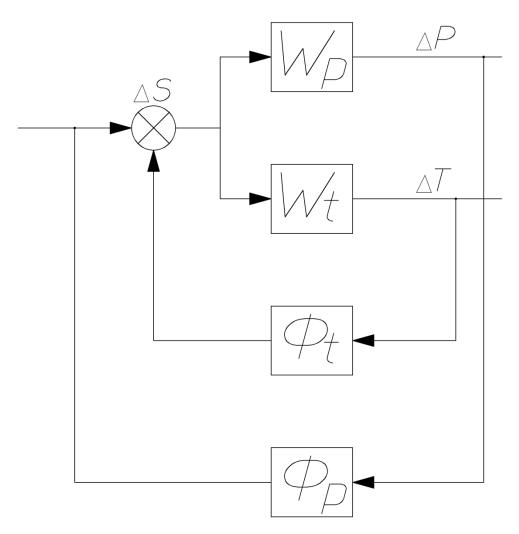
собственное и взаимное влияние параметров и контуров регулирования (рис.8). На этом рисунке, в качестве примера, приведен двухконтурный тепловой объект, где:
T - изменение температуры теплоносителя - выходной параметр первого контура;
-S - изменение расхода топлива - входной параметр первого контура;
-P -изменение давления теплоносителя - выходной параметр второго
контура;
- C - изменение температуры наружного воздуха - входной параметр второго контура;
-1 , 2 - передаточные функции регуляторов первого и второго контуров;
-Wij (p) собственные и взаимные передаточные функции параметров первого
и второго контуров регулирования
16

а)
Рис. 9 – а) структурная схема многосвязной системы с использованием собственных и взаимных передаточных функций. б) структурная схема эквивалентной одноконтурной системы
17

Для перехода к одноконтурной системе необходимо записать выражение для передаточной функции части схемы L11 ,выделенной на рисунке пунктиром:
L11 |
|
|
|
W11 (1 W22 2 ) W12 |
2W21 |
|
. |
(10) |
|||
|
|
|
|
|
|
|
|||||
W11 1 |
W22 2 W12 2W21 1 |
W11 1W22 |
|||||||||
|
1 |
2 |
|
|
|||||||
2 Методы определения свойств объекта.
Динамические свойства объекта полностью описываются системой дифференциальных уравнений. Математический аппарат преобразования Лапласа связывает систему дифференциальных уравнений с другими способами описания динамики объекта - переходной функцией и частотной характеристикой. Причем, переходную функцию и частотную характеристику можно снять экспериментально. Таким образом, возможны два метода определения свойств объекта - аналитический, через систему дифференциальных уравнений и экспериментальный, путем снятия переходных функций и частотных характеристик.
1. Аналитическое описание объекта.
Процесс составления системы дифференциальных уравнений, описывающих динамику объекта, сводится к следующему. Находят уравнение материального или энергетического баланса объекта, выявляя кинетические закономерности, гидродинамические условия и т.д. Далее, от абсолютных значений входных и выходных величин переходят к приращениям в безразмерном виде. Полученные уравнения приводят к каноническому виду.
Составим дифференциальное уравнение системы, образованной двумя баками (рис.1), приняв в качестве входной величины изменение расхода жидкости на притоке G1, а выходной - изменение уровня h2 во втором по ходу жидкости баке. Площади поперечного сечения баков A1 и A
A1 h1 G1 G2 |
G3 |
|
|
||||
G1 G10 |
G1 |
|
|
|
|||
|
|
|
|||||
|
|
|
|
|
|
|
|
G2 G20 |
G2 |
|
|
(1.1) |
|||
G1 |
v1 |
|
|
|
, |
||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
G2 |
kv2 |
|
|
|
|||
G3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2gh1 |
|
|
|
|||
|
|
|
|
|
|
|
|
Где
18

1: Расход холодной воды.2: Расход горячей воды.
3: Расход воды от смесителя в втором баке.10: Начальная величина первого расхода.20: Начальная величина второго расхода.1: Изменине первого расхода.
2: Изменине втрового расхода.
К: Постоянная величина. h:Уровень жидкости.
h10:Желаемая величина уровня в смесителе.
Для линеаризации дифференциального уравнения воспользуемся рядом Тейлора:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2g |
|
|
h1 , |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
2gh1 |
|
2gh10 |
|
|
|
|
|
|
|
|
|
|
(1.2) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
h10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
h1 |
|
|
1 |
|
|
(G G |
|
G |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
t |
|
A1 |
1 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(1.3) |
||||||
|
|
h1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
h |
|
||||||||||||||
|
|
|
|
|
(G G G |
20 |
G |
2 |
2gh |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
t |
|
A1 |
10 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
10 |
|
|
1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2h10 |
|
||||||||
При ∆t→0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
dh1 |
= R − Ch , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.4) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
dt |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Где R = |
|
v1+kv2 |
, |
С = |
|
|
|
|
|
√g |
|
. |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
A1√2h10 |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Воспользовавшись дифференциальным уравнением для бака смешения и применив преобразование Лапласа, получим его передаточную функцию:
(s) = |
R |
, |
(1.5) |
|
|||
1 |
s+C |
|
|
|
|
|
Для второго бака аналогично получим:
19

|
A h |
|
|
G |
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
2 |
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.1.6) |
|||
G4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2gh2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Для |
|
|
|
линеаризации |
нелинейного |
|
|
|
дифференциального |
уравнения |
|||||||||||||||||||||||||||||
воспользуемся рядом Тейлора: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2g |
|
h2 , |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
2gh2 |
|
2gh20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.6) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
h20 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
h2 |
|
|
1 |
|
(G |
|
G |
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
t |
|
|
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
A2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(1.7) |
||||||
|
h2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
h |
|
|
|
|
g |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
( 2gh |
|
2gh |
20 |
|
h |
2 |
) |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
t |
|
|
|
A2 |
|
|
|
|
|
10 |
|
|
|
1 |
|
|
|
|
2h20 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2h10 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
При ∆t→0
dhdt2 = Dh1 − Eh2,
(1.1.8)
Где:
|
|
|
|
|
|
|
|
|
|
|
1 |
|
g |
|
√g |
||||||
D = |
|
√ |
|
,E = |
|
|
, |
|||
A2 |
2h10 |
|
|
|||||||
A2√2h20 |
|
|||||||||
Воспользовавшись дифференциальным уравнением для контрольного (второго) бака, и применяя преобразование Лапласа получим :
H2(s) |
E |
|
|
||||
|
= |
|
|
, |
|
(1.9) |
|
H1(s) |
s+D |
|
|||||
Передаточная функция объект регулирования является H2(s). |
|
||||||
H2(s) = |
|
|
E R |
, |
(1.10) |
||
|
|
|
|||||
|
(s+D)(s+C) |
||||||
|
|
|
|
|
|
||
Составим дифференциальное уравнение системы управления по температуре (рис 1.):
|
|
|
= |
(− + |
|
+ |
), |
(1.11) |
|
||||||||
|
|
|
|
1 |
1 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
= − + + , |
|
|
(1.12) |
|||
|
|
|
||||||
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
= , |
|
|
|
(1.13) |
||||
|
|
|
|
|
|
|
|
|
20