

Билет №1
Регрессионные модели идентификации: понятия о регрессии, парная и множественная регрессия, ошибка идентификации.
Объект считается статическим, если находится в установившемся (стационарном) состоянии. Модель статического объекта связывается установившимися значениями входных и выходных сигналов.
Регрессионные модели идентификации
 ,
,
 .
.
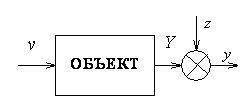
Рассматривается
объект с n
– наблюдаемыми входами
 и одним выходом. Кроме того, на выход
объекта оказывают влияние ненаблюдаемые
входы z.
Нельзя говорить о функциональной
зависимости между выходом и наблюдаемыми
входами, а можно говорить о стохастичности
или вероятностной связи.
и одним выходом. Кроме того, на выход
объекта оказывают влияние ненаблюдаемые
входы z.
Нельзя говорить о функциональной
зависимости между выходом и наблюдаемыми
входами, а можно говорить о стохастичности
или вероятностной связи.

 Упростим
задачу, рассматривая объект одним входом
Упростим
задачу, рассматривая объект одним входом
 и одним выходом
.
Будем задавать случайный вход и
фиксировать выход.
и одним выходом
.
Будем задавать случайный вход и
фиксировать выход.
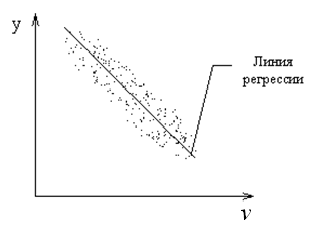
Получаем множество
точек с координатами
 – корреляционное поле. Для одного и
того же значения входа – множество
выходов (выход подвержен влиянию
ненаблюдаемых входов). Действие
ненаблюдаемых входов z
можно интерпретировать как влияние
помехи.
– корреляционное поле. Для одного и
того же значения входа – множество
выходов (выход подвержен влиянию
ненаблюдаемых входов). Действие
ненаблюдаемых входов z
можно интерпретировать как влияние
помехи.
Для того, чтобы установить связь между выходом и входом рассмотрим рисунок
Множество выходов можно заменить средним значением
 (1) где
(1) где
 - условная
плотность вероятности выхода при данном
значении
.
- условная
плотность вероятности выхода при данном
значении
.
Зависимость
называется регрессионной:
Соединяя
средние точки кривой, получим регрессию
 .
Регрессионная зависимость
.
Регрессионная зависимость
 представляет собой статическую
характеристику ОУ.
представляет собой статическую
характеристику ОУ.
Если ОУ имеет один
вход и один выход, то его характеристикой
является простая или парная регрессия:
 .
Если математическое ожидание выхода
связно n
– входами, то регрессия множественная:
.
Если математическое ожидание выхода
связно n
– входами, то регрессия множественная:
 В литературе вектор входов
В литературе вектор входов
 называют точкой в факторном пространстве,
а
называют точкой в факторном пространстве,
а
 – поверхность отклика в факторном
пространстве.
– поверхность отклика в факторном
пространстве.
К ак
простая регрессия, так и множественная,
являются моделями статического объекта
(с одним и n
– входами).
ак
простая регрессия, так и множественная,
являются моделями статического объекта
(с одним и n
– входами).
Значение выхода: (2) где
(2) где
 – фактическое значение результативного
признака (выхода ОУ);
– теоретическое значение выхода ОУ,
найденное из уравнения регрессии;
– фактическое значение результативного
признака (выхода ОУ);
– теоретическое значение выхода ОУ,
найденное из уравнения регрессии;
 – случайная величина, обусловленная
действием ненаблюдаемых факторов ОУ.
– случайная величина, обусловленная
действием ненаблюдаемых факторов ОУ.
Графически (2) представлено в виде схемы на рис выше.
Мера
близости модели и объекта определяется
некоторым функционалом ошибки:
 который зависит от структуры модели
который зависит от структуры модели вектора параметров.
вектора параметров.
Оценка
модели выполняется на основе минимизации
или снижения до определенного уровня
значения
 .
Одним из критерия идентификации является
критерий качества (4):
.
Одним из критерия идентификации является
критерий качества (4):
 (4)
Согласно которому оператор
(4)
Согласно которому оператор
 можно принять за модель объекта, если
максимальное значение модуля ошибки
идентификации на интервале наблюдений
можно принять за модель объекта, если
максимальное значение модуля ошибки
идентификации на интервале наблюдений
 стремится к минимальной величине.
Критерий (4) используется, если входы и
выход объекта являются детерминированными
функциями(неслучайными). Но, как правило,
входные воздействия являются случайными
сигналами, поэтому используется критерий
(5):
стремится к минимальной величине.
Критерий (4) используется, если входы и
выход объекта являются детерминированными
функциями(неслучайными). Но, как правило,
входные воздействия являются случайными
сигналами, поэтому используется критерий
(5):
 (5)
(5)
Выбирается та модель, которая приводит математическое ожидание в минимум. Для практики используется квадратичный критерий качества, значения которых всегда неотрицательны. Для детерминированных сигналов – критерий (6), для аналоговых – критерий (4).
 ,
(6)
,
(6)
Для случайных сигналов – критерий (7):
 .
(7)
.
(7)
 .
(8)
.
(8)

Критерий (8) используется, если выходы объекта и модели являются непрерывными функциями (функциями с непрерывным временем), если измерение осуществляется дискретно, то используется критерий (9):
 (9)
(9)
В случаях 4-9 минимизация осуществляется по оператору . Изменяем структуру и параметры операторов и выбирается с минимальной ошибкой.
2Диагностирование линейных ОУ методом комплементарного сигнала. Процедуры диагностирования, оценка работоспособности ОУ, локализация дефектов по годографу неисправностей.
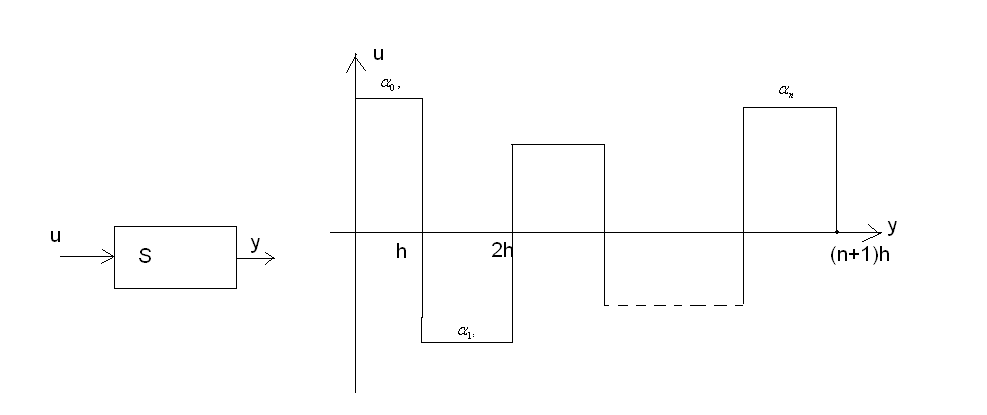
Объект
диагностики представляет собой линейную
непрерывную систему, которая заданна
описанием в пространстве состояний
вида (1). Объект имеет один вход и один
выход.
 (1) Управляющий сигнал представляет
собой последовательность разнополярных
импульсов длительностью
(1) Управляющий сигнал представляет
собой последовательность разнополярных
импульсов длительностью
 :
:
 (2) где
(2) где
 – импульсы.
– импульсы.
 – амплитуды импульсов.
– амплитуды импульсов.
 Управляющий
сигнал имеет вид: - комплементарного
сигнала
Управляющий
сигнал имеет вид: - комплементарного
сигнала
Требуется составить алгоритмы оценки работоспособности объекта и поиска неисправностей.
Процедура диагностики содержит два этапа:
синтез комплементарного сигнала (КС);
обнаружение и локализация дефектов.
Аналитический расчет КС
Синтез КС заключается
в оценке амплитуд импульсов. Чтобы можно
было сигнал использовать для диагностики
амплитуда должна быть выбрана таким
образом. Чтобы с момента
 амплитуда
амплитуда
 .
Cостояние
объекта, начиная с этого момента,
обращается в нулевой вектор.
.
Cостояние
объекта, начиная с этого момента,
обращается в нулевой вектор.

Расчет КС по измеренным значениям выходного сигнала
На вход объекта
подается единичный импульс
 длительностью
,
длительностью
,
 – реакция объекта на прямоугольный
импульс.
– реакция объекта на прямоугольный
импульс.
 – значения реакции в дискретные моменты
времени.
– значения реакции в дискретные моменты
времени.
 (7) Оценки должны
быть такими, чтобы с момента времени
реакция объекта
.
(7) Оценки должны
быть такими, чтобы с момента времени
реакция объекта
.
Процедуры диагностирования
Оценка работоспособности ОУ
-Проверка на равенство нулю реакции системы на номинальный КС при ;
-Сравнение экспериментально полученных коэффициентов КС с номинальными коэффициентами.
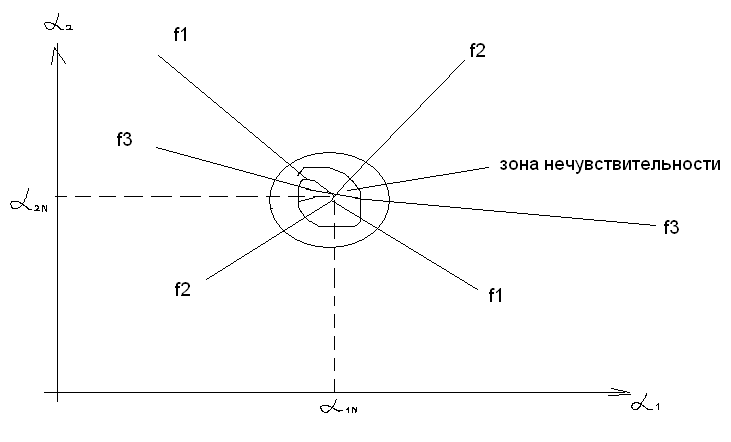
Локализация дефектов по годографу неисправностей (ГН)
Локализация неисправностей осуществляется путем сравнения фактических значений диагностических признаков с эталонными
КС исправного
объекта
 КС неисправного объекта
КС неисправного объекта

 – вектор параметров
объекта. Характеризующий его
работоспособность.
– вектор параметров
объекта. Характеризующий его
работоспособность.
Рассматривается
ситуация однократных дефектов. Под
действием вариаций параметров
изменяет и
 и
на плоскости (
и
на плоскости ( )
точка выписывает некую кривую, которая
называется годографом неисправностей.
Число годографов равно числу параметров
.
)
точка выписывает некую кривую, которая
называется годографом неисправностей.
Число годографов равно числу параметров
.
Анализ дефектов производится если объект неисправен.
 Экспериментально
определяется вектор коэффициентов
и точка в координатах
Экспериментально
определяется вектор коэффициентов
и точка в координатах
 .
Каждая должна попасть на годограф.
Попадание точки например на годограф
.
Каждая должна попасть на годограф.
Попадание точки например на годограф
 ,
который получается в результате вариации
параметра
,
который получается в результате вариации
параметра
 ,
то параметр
является недопустимым, то есть дефектным.
Если нашли точки
,
то параметр
является недопустимым, то есть дефектным.
Если нашли точки
 ,
которая является точкой пересечения
всех годографов, то этот говорит о
работоспособности объекта.
,
которая является точкой пересечения
всех годографов, то этот говорит о
работоспособности объекта.
Из формулы (6)
следует, что коэффициенты
КС определяются только собственными
числами матрицы динамики А. Эти собственные
числа
 – полюсы ОУ. То есть корни характеристического
многочлена ПФ. Изменение параметров,
определяющих работоспособность системы,
приводит к изменению коэффициентов
.
Но некоторые параметры объекта могут
влиять и на коэффициенты числителя. Но
коэффициенты числителя не используются
ни в оценке работоспособности, ни в
нахождении дефектов объекта. Поэтому,
дефекты, приводящие к изменению
коэффициентов числителя ПФ, не могут
быть обнаружены этим методом.
– полюсы ОУ. То есть корни характеристического
многочлена ПФ. Изменение параметров,
определяющих работоспособность системы,
приводит к изменению коэффициентов
.
Но некоторые параметры объекта могут
влиять и на коэффициенты числителя. Но
коэффициенты числителя не используются
ни в оценке работоспособности, ни в
нахождении дефектов объекта. Поэтому,
дефекты, приводящие к изменению
коэффициентов числителя ПФ, не могут
быть обнаружены этим методом.
3 Численные методы оптимизации, метод Ньютона, особенности метода.