

1.Метод конечных разностей
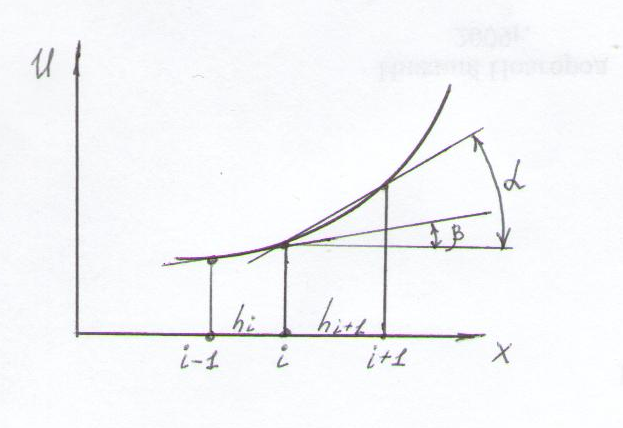
Для сведения дифференциального уравнения к разностному необходимо знать выражения для производных через искомые функции в точках регулярной или нерегулярной сетки.
Пусть задана
некоторая функция U(x),
область определения которой
![]() разбита произвольным образом на конечные
отрезки. Если hi=const,
то одномерная
сеточная область будет регулярной
(hi=h<<1).
разбита произвольным образом на конечные
отрезки. Если hi=const,
то одномерная
сеточная область будет регулярной
(hi=h<<1).
Запишем разложение
в ряд Тейлора функции
![]() в
области точки
в
области точки
![]() :
:
![]() (62)
(62)
Отсюда найдем:
![]() (63)
(63)
или
![]() (64)
(64)
где
![]() -
малая величина порядка
-
малая величина порядка
![]() .
.
Выражение
(64) есть разностное соотношение вперед
для первой производной с порядком
аппроксимации
и
равное
tg![]() .
.
Запишем
значение
![]() через
через
![]() и
через ряд Тейлора
и
через ряд Тейлора
![]() (65)
(65)
По аналогии с (63) и (64) найдем:
![]() (66)
(66)
или
![]() (67)
(67)
(67)- аналогично,
разностное соотношение назад
для первой производной с порядком
аппроксимации
![]() и
равное tg
и
равное tg![]() .
.
Сложим и разделим
на два выражения (63) и (66). Тогда получим
или
![]() –
центральное конечно-разностное
соотношение для первой производной с
порядком аппроксимации hi,
равное
–
центральное конечно-разностное
соотношение для первой производной с
порядком аппроксимации hi,
равное
![]() .
.
В случае
регулярной сетки (![]() i=
i=![]() i+1=
)
выражения (64), (67) и (68) запишутся:
i+1=
)
выражения (64), (67) и (68) запишутся:

![]() =
=![]() +
+![]() );
);
![]() =
=![]() +
);
(69)
+
);
(69)
=![]() +
+![]() );
);
Из (69) следует, что центральное конечно-разностное соотношение имеет более высокий порядок аппроксимации.
Конечно-разностное
соотношение для второй производной
получим, если из (63) вычтем (66) и выразим
отсюда ![]() .
В результате получим
.
В результате получим
![]() =
=![]() [
[![]() -
-![]() ]+0(h)
(70)
]+0(h)
(70)
В случае регулярной сетки (hi= hi+1=h)
![]() (71)
(71)
Используя
конечно-разностные соотношения для
![]() можно
получить соотношения для 3-й, 4-й и т.д.
производных. При hi=h=const
имеем:
можно
получить соотношения для 3-й, 4-й и т.д.
производных. При hi=h=const
имеем:
В случае многомерных областей уравнения векторной механики выражаются через дифференциальные уравнения в частных производных.
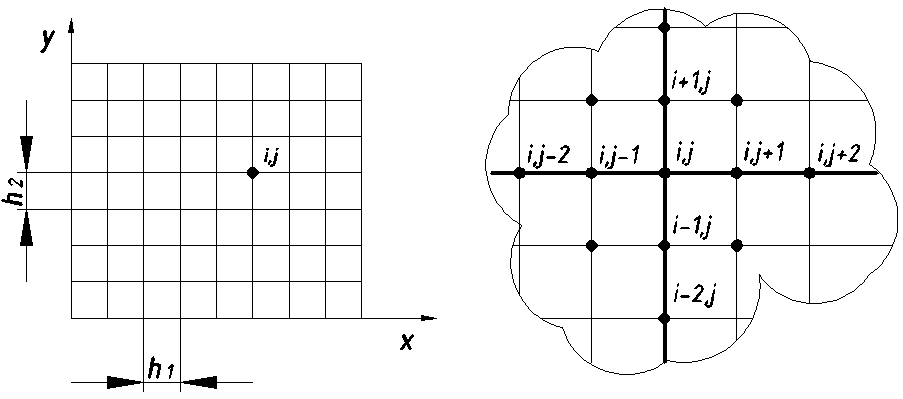
Для прямоугольной сетки с h1=const и h2=const конечно-разностные соотношения смешанных производных имеют вид:
![]()
Пример: Определить прогибы и изгибающие моменты в балке переменного поперечного сечения.
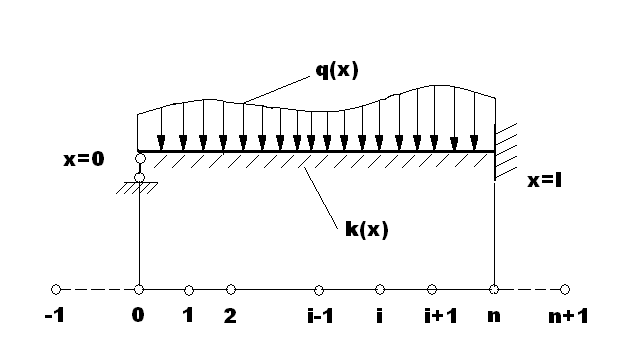
Дифференциальное уравнение изгиба балки имеет вид
![]() (72)
(72)
Граничные условия
при x=0
![]() при x=l
при x=l
![]()
Введем обозначение
![]() - изгибающий момент.
- изгибающий момент.
Тогда вместо (72) получим систему 2-х уравнений:
 (73)
(73)
Запишем эту систему для узлов сетки балки, в которых неизвестны М или W, используя конечно-разностные отношения.
![]()
![]()
Учтем граничные
условия:
![]()
и
![]() ,
что позволяет исключить из системы (74)
законтурное значение прогиба
,
что позволяет исключить из системы (74)
законтурное значение прогиба
![]() .
.
В матричной форме система (74) записывается:
![]()
![]() (75)
Где
(75)
Где ;
;
![]() ,
,
![]() -
диагональные матрицы.
-
диагональные матрицы.
Подставим второе уравнение (75) в первое. Получим:
![]() ,где
(76)
,где
(76)
![]() .
.
Выражение (76)
определяет систему линейных уравнений
относительно вектора перемещений![]() .Найдя
с
помощью второго уравнения (75) можно
определить вектор изгибающих моментов
.Найдя
с
помощью второго уравнения (75) можно
определить вектор изгибающих моментов
![]() .
.