

Вариант 3. Сложение вращений относительно параллельных осей
Рассмотрим на следующем рисунке тело, участвующее в двух вращениях относительно параллельных осей. Оно будет совершать плоское движение, и , следовательно, в каждый момент времени мгновенно вращательное. Выделив в движении тела его относительное вращение с угловой скоростью относительно оси О1 и переносное вращение относительно неподвижной оси Oz с угловой скоростью , найдем мгновенную угловую скорость и положение мгновенной оси вращения.
 Сделаем
это сначала для случая, когда направления
относительного и переносного вращений
совпадают. Определим абсолютные
скорости двух точек тела. Легче всего
это сделать для точек А и В, находящихся
на оси относительного и над осью
переносного вращения.
Сделаем
это сначала для случая, когда направления
относительного и переносного вращений
совпадают. Определим абсолютные
скорости двух точек тела. Легче всего
это сделать для точек А и В, находящихся
на оси относительного и над осью
переносного вращения.

Покажем плоскость, в которой находятся рассматриваемые точки, и векторы скоростей точек А и В. Векторы скоростей точек параллельны между собой и перпендикулярны отрезку АВ.
Зная типовые случаи определения М.Ц.С., найдем положение мгновенной оси вращения и мгновенную угловую скорость вращения тела.

 Сохранив
для определенности, что
Сохранив
для определенности, что
![]() >
>
![]() ,
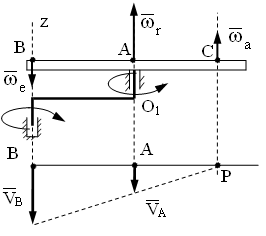
изменим на следующем рисунке
направление переносного вращения на
противоположное. В этом случае скорости
точек А и В параллельны,
перпендикулярны АВ и направлены в одну
сторону.
,
изменим на следующем рисунке
направление переносного вращения на
противоположное. В этом случае скорости
точек А и В параллельны,
перпендикулярны АВ и направлены в одну
сторону.
М.Ц.С. находится на продолжении отрезка АВ. Угловая скорость в мгновенном вращении равна

Из отношений скоростей точек А и В к их расстояниям до М.Ц.С.
выясняем также, что

Если же ввести в рассмотрение векторы угловых скоростей в относительном и переносном вращении, то для каждого из рассмотренных случаев можно записать изложенное выше более кратко.

И в заключение сделаем выводы.
Если тело участвует в двух вращениях относительно параллельных осей, то:
1.
В каждый момент, кроме случая ,
когда
![]() ,
движение тела является мгновенно
вращательным. Мгновенная ось вращения
находится в плоскости, проходящей через
оси относительного и переносного
вращений, на расстояниях от этих
осей, обратно пропорциональных
угловым скоростям в каждом из
вращений.
,
движение тела является мгновенно
вращательным. Мгновенная ось вращения
находится в плоскости, проходящей через
оси относительного и переносного
вращений, на расстояниях от этих
осей, обратно пропорциональных
угловым скоростям в каждом из
вращений.
2. Мгновенная угловая скорость равна векторной сумме параллельных векторов угловых скоростей в каждом из вращений.
3. Абсолютное движение тела является плоским.
4. Случай, когда , должен рассматриваться как особый случай поступательного движения тела.
Вариант 4. Пара вращений
Этот
случай мы и рассмотрим,
представив, что на последнем рисунке
скорости точек А и В равны между
собой. В плоском движении вариант,
когда были равны скорости двух точек
отрезка, нами рассматривался. Но
для случая, когда векторы скоростей
точек были не перпендикулярны к отрезку,
соединяющему точки. Тогда
говорилось о мгновенно поступательном
движении. В случае сложения
вращений относительно параллельных
осей с равными угловыми скоростями
и при противоположном направлении
вращений тело движется не мгновенно
поступательно, а просто поступательно.
Здесь можно доказать, что в любой
момент движения тела равны не только
скорости, но и ускорения точек. Случай
этот называется - пара
вращений.
В действительности с такой парой вращений можно встретиться, наблюдая движение кабины колеса обозрения.
При вращении колеса кабина поворачивается относительно оси подвески с той же угловой скоростью, что и колесо, но в противоположном направлении, В результате - кабина движется поступательно.
В технических устройствах иногда поступательное движение деталей механизмов получают, заставляя эти детали участвовать в паре вращений.
Вектор скорости поступательного движения тела, участвующего в паре вращений, определяется с помощью векторного произведения вектора угловой скорости переносного вращения на радиус-вектор, соединяющий оси переносного и относительного вращений тела.
![]() =
=
![]() .
.
По аналогии с вектором-моментом пары сил в статике вектор скорости поступательного движения тела в паре вращений называют вектором-моментом пары вращений. Расстояние между осями в этом случае называют плечом пары вращений.
Интересна аналогия между сложением векторов угловых скоростей в кинематике и сложением векторов сил в статике.

И в заключение к варианту 4. Как вектор-момент пары сил в статике на чертеже всегда можно заменить парой сил, так вектор скорости поступательного движения тела можно рассматривать как результат участия тела в паре вращений. Последнее утверждение используем, рассматривая следующие варианты сложения движений.