

22.Обработка результатов измерений при многократных наблюдениях.
Результаты многократных наблюдений, полученные при прямых измерениях величины А называются равноточными(равнорассеянными), если они являются независимыми, одинаково распределёнными случайными величинами. Измерения проводятся одним наблюдателем в одинаковых условиях внешней среды и с помощью одного и того же средства измерения.
Тогда статистическая обработка группы результатов наблюдений при равноточных измерениях, нормальном распределении выполняется в строгой последовательности ГОСТ 8.207-76
1.Исключается из результатов систематическая погрешность
2.Вычисляется среднее арифметическое исправленных результатов наблюдений, которое принимается за результат измерения; случайное отклонение Vi результатов отдельных наблюдений от ср.арифм значения результатов(по числовому значению и по знаку), вычислить оценку СКО(S) результатов наблюдений.
3.Проверяется гипотеза о том, что результаты наблюдений принадлежат к нормальному распределению.
4.Вычисляется оценка среднеквадратичного отклонения результатов наблюдений-S( ) и доверительные границы -1)случайной погрешности( ),2)неисключенных остатков систематической погрешности ( ),3)погрешности результата измерения(Δ)
5.Записывается результат измерения.
Среднеарифметическое исправленных результатов наблюдений, принимаемое за результат измерения вычисляется по формуле:
=

 , где n-число
равноточных наблюдений,
, где n-число
равноточных наблюдений,
 -
i-ый
результат наблюдения.
-
i-ый
результат наблюдения.
Случайные отклонения Vi результата отд наблюдения от среднего арифметического принимают за остаточные погрешности: Vi = Хi - .
Обладает свойствами:
1)сумма остаточных погрешностей =0.
2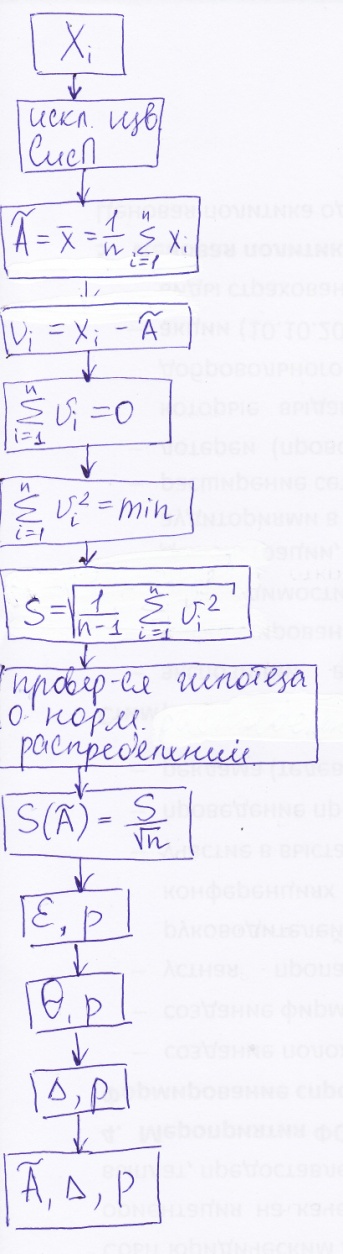 )сумма
квадратов остаточных погрешностей
принимают за мин величину
)сумма
квадратов остаточных погрешностей
принимают за мин величину
 =min
=min
Эти свойства исп-ся при обработке результатов измерений для контроля правильности вычисления. Свойство 2 вытекает из принципа Лежандра и положено в основу метода наим квадратов(МНК)
Оценка
СКО результата наблюдений(Бессель): S
= . Эта оценка явл-ся несмещенной,
самостоятельной и эффективной. Деление
суммы на (n-i)
вместо n
приближает значение S
к его теоретическому значению и чем
больше n,
тем это приближение лучше. Оценка S
характеризует степень рассеивания
результатов наблюдений относительно
ср арифм значения и определяется
совокупностью условий измерений(св-ва
прибора, кач-ва экспериментатора, разл
факторы, влияющие на процесс эксперимента).
Гипотеза о том, что результаты наблюдений
принадлежат нормальному распределению,
проверяется по уровню значимости в
пределах от 10 до 2 % Если результаты
наблюдений можно считать принадлежащими
к нормальному распределению, то из
результатов наблюдений искл грубые
погрешности, т.к. ср арифм значение
обладает некотрой случайной погрешностью,
то вводится понятие оценки СКО ср арифм
от результатов измерений.
. Эта оценка явл-ся несмещенной,
самостоятельной и эффективной. Деление
суммы на (n-i)
вместо n
приближает значение S
к его теоретическому значению и чем
больше n,
тем это приближение лучше. Оценка S
характеризует степень рассеивания
результатов наблюдений относительно
ср арифм значения и определяется
совокупностью условий измерений(св-ва
прибора, кач-ва экспериментатора, разл
факторы, влияющие на процесс эксперимента).
Гипотеза о том, что результаты наблюдений
принадлежат нормальному распределению,
проверяется по уровню значимости в
пределах от 10 до 2 % Если результаты
наблюдений можно считать принадлежащими
к нормальному распределению, то из
результатов наблюдений искл грубые
погрешности, т.к. ср арифм значение
обладает некотрой случайной погрешностью,
то вводится понятие оценки СКО ср арифм
от результатов измерений.
Доверительный
границы случайной погрешности( (без учета знака):
(без учета знака):
 , где t-коэф
распределения Стьюдента(зависит от
заданной доверительной вероятности р
и числа измерений n)
, где t-коэф
распределения Стьюдента(зависит от
заданной доверительной вероятности р
и числа измерений n)
Доверительные
границы неисключенной систематической
погрешности (
)
вычисляются путем построения композиции
неисключенных систематических
погрешностей средств измерений, метода
и погрешностей, вызванных другими
источниками. При равномерном распределении
неисключенных систематических
погрешностей эти границы (без учета
знака) можно вычислить по формуле:
 , k
–коэф, определяемый принятой доверительной
вероятностью. k
для P
определяется из практических графиков.
Доверительные границы погрешности
результата измерений зависят от отношения
, k
–коэф, определяемый принятой доверительной
вероятностью. k
для P
определяется из практических графиков.
Доверительные границы погрешности
результата измерений зависят от отношения
 < 0,8 – неисключенной систематической
погрешностью по сравнению со случайной
можно пренебречь. Если > 0,8 ,то случайная
по сравнению с систематической –мала.
< 0,8 – неисключенной систематической
погрешностью по сравнению со случайной
можно пренебречь. Если > 0,8 ,то случайная
по сравнению с систематической –мала.
Погрешность,
возникающая из-за пренебрежения одной
из составляющих погрешности результата
измерения при выполнении указанных
неравенств, не превышает 15 %. Если эти
неравенства не выполняются, то границу
погрешности результата измерения
находят путем построения композиции
распределений случайных и неисключенных
систематических погрешностей. Находят
оценку СКО результатов: 
Правила
округления:1)результат округляется в
соотв с его погрешностью одновременнос
с округлением результата должна
оцениваться и его погрешность.2)погрешность-две
значащие цифры, если первая=1 или 2, и
одна, если первая =3 и более.3)округление
лишь в окончательном ответе, а все
промежуточные результаты не менее чем
с двумя и более лишними разрядами.
одновременнос
с округлением результата должна
оцениваться и его погрешность.2)погрешность-две
значащие цифры, если первая=1 или 2, и
одна, если первая =3 и более.3)округление
лишь в окончательном ответе, а все
промежуточные результаты не менее чем
с двумя и более лишними разрядами.
23.АНАЛОГОВЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ(АЭИП). ОБОБЩЕННОЕ УРАВНЕНИЕ ШКАЛЫ.
АЭИП применяют для измерения тока, напряжения, мощности, сопротивлений и др электрических величин на постоянном и переменном токах преимущественно промышленной частоты 50Гц.
Эти приборы-приборы прямого действия. Они состоят из электрического преобразователя(измерительной цепи), электромеханического преобразователя(измерительный механизм) и отсчетного устройства.
 Измерительная
цепь обеспечивает преобразование
электрической измеряемой величины в
промежуточную величину У(ток, напряжение),
функционально связанную с Х.(У
непосредственно воздействует на
механизм)
Измерительная
цепь обеспечивает преобразование
электрической измеряемой величины в
промежуточную величину У(ток, напряжение),
функционально связанную с Х.(У
непосредственно воздействует на
механизм)
По
характеру преобразований измерительная
цепь может представлять собой совокупность
элементов(резисторы, конденсаторы..).
Разл измерительные цепи позволяют
использовать один и тот же измерительный
механизм(ИМ) при измерении разнородных
величин(I,U,R).
В ИМ электромагнитная энергия преобразуется
в поворот подвижной части на некоторый
угол
 .
.

При установившихся показаниях прибора, т.е. постоянном отклонении подвижной части, система характеризуется равенством вращающего момента М и противодействующего момента Мα, т.е. Мα=М. Вращающий момент М определяется для всех ЭИП скоростью изменения энергии электромагнитного поля ω, сосредоточенной в механизме, по углу отклонения α подвижной части: М = (∂ω/∂α). Противодействующий момент Мα создается механически с помощь пружин, растяжек, подводящих проводов и пропорционален углу отклонения α подвижной части: Мα = - W∗α, где W – удельный противодействующий момент на единицу угла закручивания пружины. Он зависит от материала пружины и ее геометрических размеров.
При подстановке в равенство Мα=М аналитических выражений моментов получают уравнение шкалы прибора, показывающее зависимость угла α подвижной части от значения измеряемой величины и параметров измерительного механизма. В зависимости от способа преобразования электромагнитной энергии в механическое угловое перемещение подвижной части ИМ приборы делят на магнитоэлектрические, электродинамические, ферромагнитные, электромагнитные, электростатические и др. Отсчетное устройство аналоговых ЭИП чаще всего состоит из указателя, жестко связанного с подвижной частью ИМ, и неподвижной шкалы. Шкала представляет собой совокупность отметок (штрихов, черточек), которые расположены вдоль какой-либо линии и изображают ряд последовательных чисел, соответствующих значениям измеряемой величины. Указатели бывают стрелочные (механические) и световые. По начертанию шкалы бывают прямолинейные (горизонтальные или вертикальные), дуговые (при дуге до 180° включительно) и круговые ( при дуге более 180°). По характеру расположения отметок различают шкалы равномерные и неравномерные, односторонние относительно нуля, двухсторонние и безнулевые. Шкалы градуируются либо в единицах измеряемой величины (именованная шкала), либо в делениях (неименованная шкала). По именованной шкале можно произвести непосредственный отсчет, для снятия показаний с неименованной шкалы используют градуировочный график – зависимость измеряемой величины от числа делений (например, в термопарных вакуумметрах типа ВИТ-2). Числовое значение измеряемой величины равно произведению числа делений, прочитанных на шкале на цену деления прибора (если последняя постоянна). Цена деления – значение измеряемой величины, соответствующее одному делению шкалы.
24.ОБЩИЕ
УЗЛЫ И ДЕТАЛИ ЭЛЕКТРОМЕХАНИЧЕСКИХ
ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ Для
большинства электромеханических
измерительных приборов, несмотря на
разнообразие измерительных механизмов(ИМ),
можно выделить общие узлы и детали –
устройства для установки подвижной
части ИМ, создания противодействующего
момента, уравновешивания; успокоители.
Так как любой ИМ электромеханического
прибора состоит из подвижной и неподвижной
частей, то для обеспечения свободного
перемещения подвижной части последнюю
устанавливают на опорах, растяжках или
подвесе.
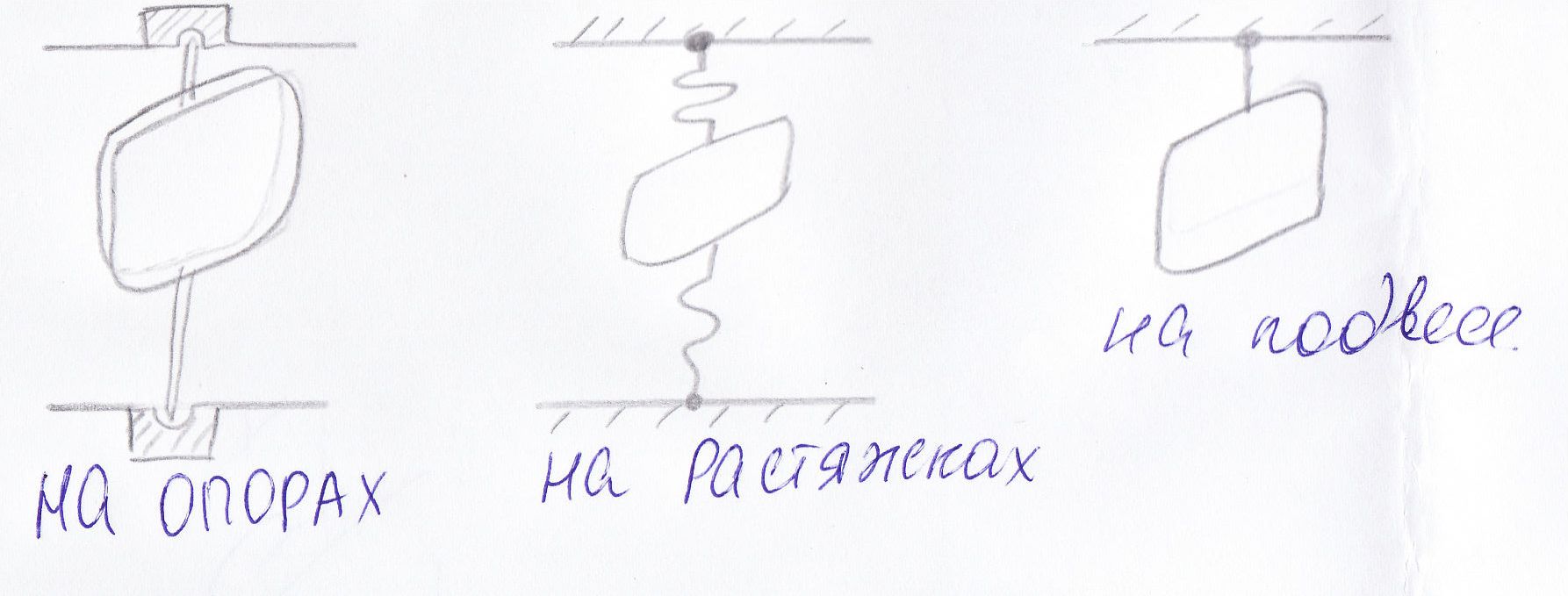 1)
При установке подвижной части ИМ на
опорах последние представляют собой
легкую алюминиевую трубку, в которую
запрессованы керны (стальные отрезки).
Концы кернов затачивают и шлифуют на
конус с закруглением. Опираются керны
на агатовые или корундовые подпятники.
При установке ИМ на опорах между керном
и подпятником возникает трение, что
вносит погрешность в показания прибора.
В приборах высокого класса точности
для уменьшения трения ось устанавливается
вертикально, чтобы нагрузка сосредоточивалась
в основном на нижней опоре. 2)Установка
подвижной части ИМ на растяжках наиболее
распространена в приборах. Растяжки
представляют собой две тонкие ленты из
бронзового сплава, на которых подвешивается
подвижная часть ИМ. Такая конструкция
обеспечивает отсутствие трения в опорах,
облегчает подвижную систему, повышает
виброустойчивость прибора в целом.
Растяжки используют также для подведения
тока к обмотке рамки и создания
противодействующего момента. 3)Установку
подвижной части ИМ на подвесе используют
в особо чувствительных приборах.
Подвижную часть ИМ подвешивают на тонкой
металлической (иногда кварцевой) нити.
Ток в рамку подводят через нить подвеса
и специальный безмоментный токоподвод
из золота или серебра. Противодействующий
момент в ИМ с установкой подвижной части
на опорах создается одной или двумя
плоскими спиральными пружинами,
выполненными из оловянно-цинковой
бронзы. Пружины используются также и в
качестве токоподводов к обмотке рамки
подвижной части. Для уравновешивания
подвижной части ИМ служат грузики-
противовесы. ИМ считается уравновешенным,
когда центр тяжести подвижной части
совпадает с осью вращения. Хорошо
уравновешенный ИМ показывает при
различных положениях одно и то же
значение измеряемой величины. Д
1)
При установке подвижной части ИМ на
опорах последние представляют собой
легкую алюминиевую трубку, в которую
запрессованы керны (стальные отрезки).
Концы кернов затачивают и шлифуют на
конус с закруглением. Опираются керны
на агатовые или корундовые подпятники.
При установке ИМ на опорах между керном
и подпятником возникает трение, что
вносит погрешность в показания прибора.
В приборах высокого класса точности
для уменьшения трения ось устанавливается
вертикально, чтобы нагрузка сосредоточивалась
в основном на нижней опоре. 2)Установка
подвижной части ИМ на растяжках наиболее
распространена в приборах. Растяжки
представляют собой две тонкие ленты из
бронзового сплава, на которых подвешивается
подвижная часть ИМ. Такая конструкция
обеспечивает отсутствие трения в опорах,
облегчает подвижную систему, повышает
виброустойчивость прибора в целом.
Растяжки используют также для подведения
тока к обмотке рамки и создания
противодействующего момента. 3)Установку
подвижной части ИМ на подвесе используют
в особо чувствительных приборах.
Подвижную часть ИМ подвешивают на тонкой
металлической (иногда кварцевой) нити.
Ток в рамку подводят через нить подвеса
и специальный безмоментный токоподвод
из золота или серебра. Противодействующий
момент в ИМ с установкой подвижной части
на опорах создается одной или двумя
плоскими спиральными пружинами,
выполненными из оловянно-цинковой
бронзы. Пружины используются также и в
качестве токоподводов к обмотке рамки
подвижной части. Для уравновешивания
подвижной части ИМ служат грузики-
противовесы. ИМ считается уравновешенным,
когда центр тяжести подвижной части
совпадает с осью вращения. Хорошо
уравновешенный ИМ показывает при
различных положениях одно и то же
значение измеряемой величины. Д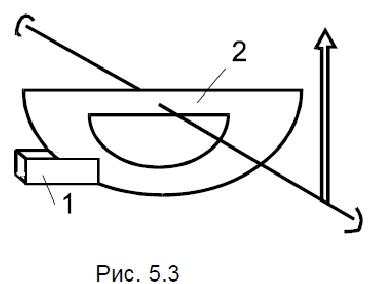 ля
создания необходимого успокоения ИМ
снабжают успокоителями, развивающими
момент, направленный навстречу движению
рамки (время успокоения должно быть не
более 4 с). В ИМ наиболее часто применяются
магнитоиндукционные, жидкостные или
масляные успокоители. Магнитоиндукционный
успокоитель (рис. 5.3.) состоит из постоянного
магнита 1 и алюминиевого диска 2, жестко
связанного с подвижной частью ИМ и
свободно перемежающегося в поле
постоянного магнита. Успокоение создается
за счет взаимодействия токов,
индуктированных в диске.
ля
создания необходимого успокоения ИМ
снабжают успокоителями, развивающими
момент, направленный навстречу движению
рамки (время успокоения должно быть не
более 4 с). В ИМ наиболее часто применяются
магнитоиндукционные, жидкостные или
масляные успокоители. Магнитоиндукционный
успокоитель (рис. 5.3.) состоит из постоянного
магнита 1 и алюминиевого диска 2, жестко
связанного с подвижной частью ИМ и
свободно перемежающегося в поле
постоянного магнита. Успокоение создается
за счет взаимодействия токов,
индуктированных в диске.
25.МАГНИТОЭЛЕКТРИЧЕСКИЕ
ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ(МИП) Работа
магнитоэлектрических измерительных
приборов основана на взаимодействии
катушки с током и магнитного потока
постоянного магнита. Один из
взаимодействующих элементов
подвижный(катушка, рамка с током) и др
неподвижный магнит, или наоборот но это
реже.
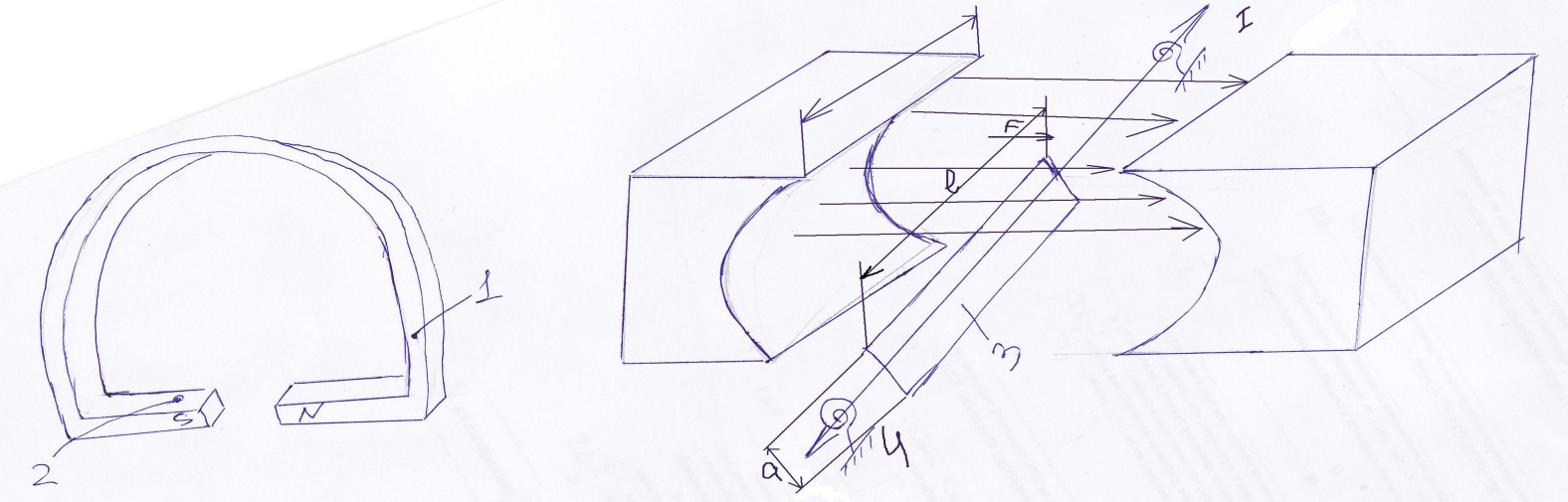 Конструктивно
прибор состоит из постоянного магнита
1(из магнитотвердого материала), полюсных
наконечников 3 и противодействующей
пружины 4. В воздушном зазоре между
полюсными наконечниками магнита и
цилиндрическим сердечником создается
практически равномерное радиальное
магнитное поле. В этот зазор помещается
рамка 3, выполненная из тонкого
изолированного медного провода,
намотанного на легкий бумажный или
алюминиевый каркас прямоугольной формы.
Рамка может поворачиваться вместе с
осью и стрелкой. Измеряемый ток I
пропускают в обмотку рамки через 2
спиральные пружины, создающие также
противодействующий момент. При протекании
по обмотке рамки постоянного тока на
активные стороны рамки действует пара
сил F,
создающие вращающий момент
Mвр=
Конструктивно
прибор состоит из постоянного магнита
1(из магнитотвердого материала), полюсных
наконечников 3 и противодействующей
пружины 4. В воздушном зазоре между
полюсными наконечниками магнита и
цилиндрическим сердечником создается
практически равномерное радиальное
магнитное поле. В этот зазор помещается
рамка 3, выполненная из тонкого
изолированного медного провода,
намотанного на легкий бумажный или
алюминиевый каркас прямоугольной формы.
Рамка может поворачиваться вместе с
осью и стрелкой. Измеряемый ток I
пропускают в обмотку рамки через 2
спиральные пружины, создающие также
противодействующий момент. При протекании
по обмотке рамки постоянного тока на
активные стороны рамки действует пара
сил F,
создающие вращающий момент
Mвр= =
=
 = 2F
= 2F =B
=B ,
,
 B-магн
индукция в воздушном зазоре,
B-магн
индукция в воздушном зазоре, S=
S= -активное
сопротивления рамки. Mвр=BSn
-активное
сопротивления рамки. Mвр=BSn =
= Вращающий момент с радиальным равномерным
магнитным полем в воздушном зазоре не
зависит от угла отклонения α подвижной
части. Под действием М подвижная часть
поворачивается вокруг оси подкручивая
пружины, создающие противодействующий
М. При отклонении рамки на некотрый угол
вращения и противодействующие М станут
равными по значению, дальнейшее отклонение
рамки прекратится и производят отсчет
значений ИВ. Из условия М =
Вращающий момент с радиальным равномерным
магнитным полем в воздушном зазоре не
зависит от угла отклонения α подвижной
части. Под действием М подвижная часть
поворачивается вокруг оси подкручивая
пружины, создающие противодействующий
М. При отклонении рамки на некотрый угол
вращения и противодействующие М станут
равными по значению, дальнейшее отклонение
рамки прекратится и производят отсчет
значений ИВ. Из условия М =
 получаем
получаем
 = W·α, откуда α =
/ W =
= W·α, откуда α =
/ W =
 ·I,
где
– чувствительность измерительного
механизма по току. Из этой формулы
следует, что приборы магнитоэлектрической
системы имеют линейную, равномерную
шкалу (разумеется, это относится к
измерениям постоянных токов).При
изменении направления тока изменяется
направление отклонения подвижной части,
поэтому при включении измерительного
механизма в цепь переменного тока из-за
инерционности его подвижной части
среднее значение Mвр
за период будет =0. В магнитоэлектрических
ИМ успокоение подвижной части
магнитоиндукционное, но без применения
специальных успокоителей. При движении
алюминиевой в ней индуктируются токи,
создающие совместно с полем постоянного
магнита тормозящий момент. Достоинства
магнитоэлектрических приборов:
высокая чувствительность; высокая
точность – до класса 0,05; малое потребление
мощности от измеряемой цепи - хорошее
успокоение и равномерность шкалы.
Недостатки:
сравнительная сложность изготовления
и ремонта; недопустимость даже
кратковременных перегрузок.
Магнитоэлектрические приборы применяют:1)
в качестве амперметров, вольтметров и
гальванометров,2)световые осциллографы
·I,
где
– чувствительность измерительного
механизма по току. Из этой формулы
следует, что приборы магнитоэлектрической
системы имеют линейную, равномерную
шкалу (разумеется, это относится к
измерениям постоянных токов).При
изменении направления тока изменяется
направление отклонения подвижной части,
поэтому при включении измерительного
механизма в цепь переменного тока из-за
инерционности его подвижной части
среднее значение Mвр
за период будет =0. В магнитоэлектрических
ИМ успокоение подвижной части
магнитоиндукционное, но без применения
специальных успокоителей. При движении
алюминиевой в ней индуктируются токи,
создающие совместно с полем постоянного
магнита тормозящий момент. Достоинства
магнитоэлектрических приборов:
высокая чувствительность; высокая
точность – до класса 0,05; малое потребление
мощности от измеряемой цепи - хорошее
успокоение и равномерность шкалы.
Недостатки:
сравнительная сложность изготовления
и ремонта; недопустимость даже
кратковременных перегрузок.
Магнитоэлектрические приборы применяют:1)
в качестве амперметров, вольтметров и
гальванометров,2)световые осциллографы