

45. Определение параметров закона движения главного вала машинного агрегата.
Режимы движения механизмов
В зависимости от того какую работу совершают внешние силы машины различают три режима движения: разгон (разбег, пуск), торможение (выбег, останов) и установившееся движение (рис. 12.3).
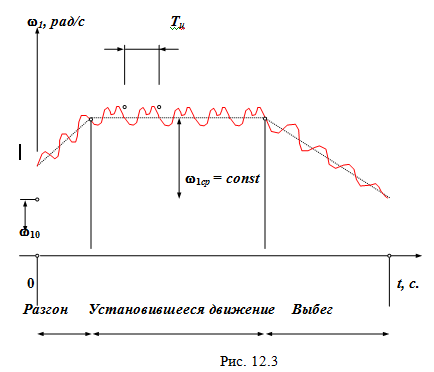
Установившимся движением механизма называют такое движение, при котором его обобщенная скорость и кинетическая энергия являются периодическими функциями времени. Минимальный промежуток в начале и в конце которого повторяются значения кинетической энергии и обобщенной скорости механизма – называют временем цикла установившегося движения.
Для
идеальной механической системы, в
которой нет потерь энергии и звенья
абсолютно жесткие при получении уравнений
движения механизма можно воспользоваться
теоремой об изменении кинетический
энергии: разность энергии за какой либо
промежуток времени равна работе сил за
тот же промежуток времени.
![]() ,где
Ад.с.
– работа движущих сил; Ап.с.
– работа сил производственных
сопротивлений; Ав.с.
– работа сил вредных сопротивлений
(трения и внешней среды); АG
– работа сил веса.
,где
Ад.с.
– работа движущих сил; Ап.с.
– работа сил производственных
сопротивлений; Ав.с.
– работа сил вредных сопротивлений
(трения и внешней среды); АG
– работа сил веса.
Для
режима разгона: i0
= 0, Ап.с.
= 0, тогда:
![]() .
.
Работа движущих сил при разгоне расходуется кинетическую энергию, работу сил вредных сопротивлений и веса.
При
установившемся движении за каждый цикл
движения работа всех внешних сил равна
нулю![]() .
.
Для
режима выбега: i
= 0, Ад.с.
= 0, Ап.с.
= 0 тогда:![]() .
.
Запасённая кинетическая энергия при выбеге тратится на преодоление работ сил вредных сопротивлений и веса.
Режимы разгона и выбега называют режимами неустановившегося движения.
Уравнение движения механизма в дифференциальном виде
Содержит вторые производные от координат по времени. Изменение кинетической энергии механизма равно приращению работ сил действующих на механизм:
.
В случае если начальное звено совершает вращательное движение: .
Тогда: , ,
Преобразуем второе слагаемое с учетом: .
Подставляя получаем: .
В случае если Jпр = const (маховое колесо, ротор двигателя и т.п.) получаем (второй закон Ньютона для вращательного движения).
46. Учёт сил инерции звеньев машин.
Силы инерции звеньев
Силы инерции звеньев рассматриваются как реакции звена на изменение его скорости по величине и направлению. Существование сил инерции обусловлено двумя обстоятельствами: фактом наличия у звеньев массы и фактом движения звеньев, сопровождающегося в общем случае ускорениями отдельных точек и всего звена в целом, так как известно из теоретической механики, что мерой сил инерции является произведение массы на ускорение.
Из
курса теоретической механики известно,
что систему сил инерции в общем случае
можно привести к силе – главному вектору
сил инерции
![]() приложенного в центре масс s
звена (рис. 11.6) и к паре сил, момент которой
называется главным моментом сил инерции
приложенного в центре масс s
звена (рис. 11.6) и к паре сил, момент которой
называется главным моментом сил инерции
![]() .
.
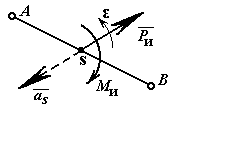
Рис. 11.6
Главный
вектор сил инерции определяют по формуле:
![]() .
.
Главный
момент сил инерции определяют по
формуле:![]() ,
,
где m – масса звена, кг; аs – ускорение цента масс, м/с2; Js – момент инерции звена относительно оси проходящей через центр масс перпендикулярной плоскости движения, кг/м2; - угловое ускорение звена, с-2.
Знак «» указывает на то, что векторы и соответственно направлены противоположно аs и .