

4Аппаратные средства aTmega 8535 avr
Микроконтроллеры объединяются в семейства. К одному семейству относят изделия, имеющие одинаковое ядро, под которым понимают совокупность таких понятий, как система команд, циклограмма работы ЦП, организация памяти программ и памяти данных, система прерываний и базовый набор периферийных устройств. Отличия между различными представителями одного семейства заключаются, в основном, в составе периферийных устройств и объеме памяти программ или данных. Наиболее важная особенность семейства это программная совместимость на уровне двоичного кода всех входящих него МК.
4.1Функциональная схема архитектуры
Гарвардская архитектура AVR реализует полное логическое и физическое разделение не только адресных пространств, но информационных шин для обращения к памяти программ и к памяти данных, причем способы адресации и доступа к этим массивам памяти также различны. Центральный процессор работает одновременно как с памятью программ, так и с памятью данных; разрядность шины памяти программ расширена до 16 бит.
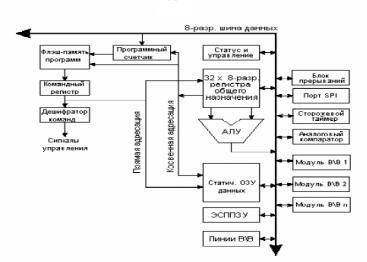
Рис. 4.1 – Структурная схема вычислительного блока
Регистровый файл с быстрым доступом содержит 32 x 8-разр. рабочих регистров общего назначения с одно тактовым циклом доступа. 6 регистров из них могут использоваться как три 16-разр. регистра косвенного адреса для эффективной адресации в пределах памяти данных(X - регистр,Y - регистр и Z - регистр).
Система команд AVR весьма развита и насчитывает до 133 различных инструкций. Почти все команды имеют фиксированную длину в одно слово (16 бит), что позволяет в большинстве случаев объединять в одной команде и код операции, и операнд(ы).
Лишь немногие команды имеют размер в 2 слова (32 бит) и относятся к группе команд вызова процедуры CALL, длинных переходов в пределах всего адресного пространства JMP ,возврата из подпрограмм RET и команд работы с памятью программ LPM.
Различают пять групп команд AVR: условного ветвления, безусловного ветвления, арифметические и логические операции, команды пересылки данных, команды работы с битами.
В последних версиях кристаллов AVR семейства «mega» реализована функция аппаратного умножения, что придает новым микроконтроллерам еще больше привлекательности с точки зрения разработчика.
Контроллер ATmega 8535 это 8 битный AVR® микроконтроллер c 8 Кбайт FLASH памятью программ.
К отличительным особенностям микроконтроллера относят:
высокую производительность при малом потреблении;
развитую RISC архитектуру;
130 команд, большинство из которых исполняется за один машинный такт;
32x8 рабочих регистра общего назначения;
полностью статический режим;
до 16 MIPS производительность при 16 МГц;
Встроенный 2-х тактный умножитель
энергонезависимая память программ и память данных;
8К байтов FLASH памяти программ с внутрисистемным самопрограммированием;
10 000 циклов записи – стирания;
загрузочная область памяти с независимыми ключевыми битами;
512 байтов EEPROM;
100 000 циклов записи- стирания;
512 байтов внутренней SRAM;
программируемый ключ доступа к программам и памяти данных;
Как и любой 8 - битный микроконтроллер, микроконтроллер семейства AVR, состоит из процессора гарвардской или фоннеймановской архитектуры, памяти программ, памяти данных, портов ввода / вывода, периферийных устройств и интерфейсных схем.
В микропроцессорной технике используют следующие основные понятия и сокращения:
SPM это функция самопрограммирования Flash ROM памяти микроконтроллера в системе без участия внешнего программатора;
JTAG это стандартный интерфейс для программирования МК;
I / O это линии ввода / вывода;
POR (Power On Reset) это начальный сброс МК задача которого удержать сигнал сброса в активном состоянии пока не стабилизируется питание и кварцевый резонатор;
BOD (Brown Out Detector) это отслеживает провалы питающего напряжения. В МК обычно с регулируемым порогом(2,7В, 4В);
WDT (Watch Dog Timer) это сторожевой таймер для предотвращения «зависания» программы микроконтроллера;
BDC это аппаратный программируемый блок защиты от сбоев при внезапном (в том числе и кратковременном) пропадании напряжения питания микроконтроллера;
UART это асинхронный последовательный приемопередатчик;
SPI это синхронный трехпроводной последовательный интерфейс;
I2C это двухпроводной последовательный интерфейс;
RTC это система реального времени;
PWM это широтно-импульсный модулятор.
Вычислительный блок является самым отличительным блоком в МК. Он определяет концепцию построения и принцип работы с памятью. Структурная схема вычислительного блока представлена на Рис. 4.1.