

26. Задачи динамики. Решение задач динамики.
Дина́мика (греч. δύναμις — сила) — раздел механики, в котором изучаются причины возникновения механического движения. Динамика оперирует такими понятиями, как масса, сила, импульс, энергия.
Исторически деление на прямую и обратную задачу динамики сложилось следующим образом.
Прямая задача динамики: по заданному характеру движения определить равнодействующую сил, действующих на тело.
Обратная задача динамики: по заданным силам определить характер движения тела.
32. Лишние условия связи.
Необходимо отметить, что во время исследования структуры механизма могут оказаться условия связи и степени вольности, которые не влияют на характер движения механизма в целом. Такие условия связи называют пассивными, а степени вольности — лишними, поскольку их можно изъять без изменения общего характера движения механизма.
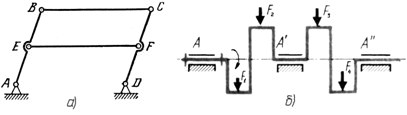
Рассмотрим для примера рычажный п'ятиланковий механизм двойного параллелограмма, который на практике встречается в весовых механизмах, швейных двоголчастих машинах, спарниках тепловозов и электровозов (рис. 1.8, а). При значительных нагрузках звенья могут недопустимо деформироваться. Кроме того, шарнирный параллелограмм, переходя через свое предельное положение, может превратиться в антипараллелограмм. Для лишения этих недостатков в конструкцию механизма вводят дополнительный шатун EF. При этом размеры звеньев удовлетворяют условия АВ = СD, АD = ЕF = ВС, АЕ = ВЕ и DF = FС.
С учетом второго шатуна степень подвижной механизма параллелограмма
W = 3n-2р5-р4 =3·4-2·6 = 0
то есть, согласно расчету, такая кинематическая цепь не имеет подвижной, а является фермой. В действительности, как это подтверждает практика, в случае приведения в движение кривошипа АВ (другого звена ли) все звенья данной кинематической цепи имеют полностью определенные движения. Следовательно, это механизм, а кинематические пары Е и F и связки, наложенные ими на звенья, не влияют на движение механизма в целом
33. Структурный синтез и анализ плоских рычажных механизмов.
Структурный анализ и синтез является первичным этапом проектирования любой ме-ханической системы (механизмы, фермы, замкнутые и открытые кинематические цепи), ко-торый полностью предопределяет эффективность применения в разных областях техники [1-18].
Структурный анализ заключается в решении проблем установления параметров строения и числа степеней подвижности для выявления и определения путей устранения вредных избыточных связей в анализируемых схемах механизмов.
Структурный синтез заключается в создании структурных схем (механизмов, ферм и т.д.), обеспечивающих требуемое число степеней подвижности механизма)(W, число из-меняемых замкнутых контуров)(K в его кинематической цепи, отсутствие избыточных связей и минимум числа звеньев цепи).~(n Проблема структурного синтеза новых механизмов заключается в определении тре-буемой номенклатуры звеньев проектируемого механизма и установлении требуемого набо-ра простых и совмещенных шарниров для сборки из этих звеньев безызбыточных цепей с требуемым.W
В качестве единой основы для решения этих проблем можно использовать рассматриваемый ниже на примерах табличный метод структурного анализа и синтеза на базе полученных расчетным путем по компьютерным программам «Универсальной струк-турной таблицы стандартных кодов правильного строения механизмов» и дополняющей ее «Полной таблицы стандартных наборов совмещенных шарниров», содержащих все возмож-ные целочисленные решения структурных уравнений замкнутых кинематических цепей.
В развитии науки о структуре механизмов можно выделить следующие 3 этапа.
1. Первый этап – включает [4] установление П.Л. Чебышевым в 1869 г. в его докладе «О параллелограммах» необходимого соотношения между числом звеньев и кинематиче-ских пар в плоских механизмах и опубликованную в 1883 г. работу М. Грюблера по пред-ставлению структуры кинематических цепей плоских механизмов в виде изменяемых замк-нутых контуров из различных многопарных звеньев [4].
2. Второй этап – определен опубликованной в 1914 г. базовой u1088 работой Л.В. Ассура по выделению статически определимых групп открытых кинематических цепей для образова-ния из них структурных схем механизмов [8].
На основе работе П.Л. Чебышева, М. Грюблера и Л.В. Ассура выполняются многочис-ленные исследования по анализу, синтезу и классификации механизмов [8-15] и выпускают-ся технические словари с обзором механизмов, применяемых в разных областях машино-строения [1-3], а механика рассматривается [1], как «искусство построения машин».
3. Третий этап – связан с разработкой в конце XX века разными авторами [18] ком-пьютерных программ структурного синтеза многозвенных кинематических цепей c просты-ми шарнирами (так называемых «simple-jointed kinematic chains» [18]) и созданием в 1988 г. Э.Е. Пейсахом «Системы проектирования плоских рычажных механизмов» [16], позволив-шей ему путем автоматизированного синтеза на основе единого алгоритма поиска и отбра-ковки изоморфных (повторяющихся) схем составить полный электронный каталог механи-ческих систем, содержащих только простые (т.е. несовмещенные) шарниры.