

III вопрос. «Способы решения навигационных задач».
1) Способы определения местоположения ЛА.
Для определения местоположения ЛА в навигации применяются различные способы, которые можно разделить на три группы:
а) Обзорно – сравнительный способ (визуальная ориентировка; сравнение телевизионных, радиотепловых, радиолокационных и других изображений местности с соответствующими картами).
Недостатки способа:
невозможность в ряде случаев определения места ЛА в плохих метеоусловиях и безориентированной местности (море, пустыня, тайга и т.п.);
трудность полной автоматизации, и, вследствие этого, необходимость участия оператора;
демаскировка ЛА в случае применения РЛС и других визирных систем с излучением.
б) Способ линий (поверхностей) положения с использованием радиотехнических и т.п. систем. Основан на определении местоположения ЛА путем засечек, т.е. линий положения относительно известных ориентиров.
Линией положения называется геометрическое место точек на поверхности, соответствующих одному значению навигационного параметра (расстояние, сумма или разность расстояний, угол, скорость полета ЛА и т.п.). Навигационные параметры являются функцией от координат местоположения ЛА.
Линией положения ЛА при пеленгации наземных радиостанций с использованием бортового радиопеленгатора является линия равных пеленгов. На плоскости это прямая, проходящая через точку расположения радиомаяка, на сфере это дуга большого круга – ортодромия (рис. 7).

Рис. 7.
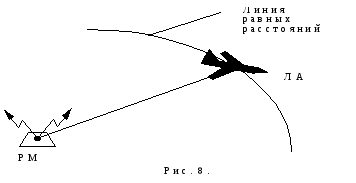
Линией положения при использовании дальномерных систем является линия равных расстояний – окружность (рис. 8).
 Линией положения
ЛА при использовании разностно-дальномерных
систем является линия
равных разностей расстояний (рис.
9). Она представляет собой геометрическое
место точек, разность расстояний от
любой из которых до станций A
и B
равняется
постоянной величине 2a
= DB
- DA
= const.
На плоскости
это гипербола, на сфере – сферическая
гипербола.
Линией положения
ЛА при использовании разностно-дальномерных
систем является линия
равных разностей расстояний (рис.
9). Она представляет собой геометрическое
место точек, разность расстояний от
любой из которых до станций A
и B
равняется
постоянной величине 2a
= DB
- DA
= const.
На плоскости
это гипербола, на сфере – сферическая
гипербола.
Местоположение ЛА при использовании способа линий положений определяется как точка пересечения двух или более линий положения.

Достоинство способа состоит в том, что определение места ЛА происходит без учета и даже без знания пройденного им ранее пути. Недостатком его является дискретность в фиксации местоположения ЛА.
в) Способ счисления пути:
Основан на вычислении пройденного пути относительно известного начального положения ЛА. Для осуществления счисления пути необходимо располагать данными о направлении движения ЛА и его ускорении или скорости движения относительно Земли. Различают доплеровское, инерциальное, воздушное счисление пути и их комбинации. Недостатком способа является рост ошибок определения местоположения ЛА во времени.
2) Способы полета ЛА по заданной траектории.
Д ля
обеспечения полета ЛА по заданной
траектории необходимо непрерывно или
дискретно управлять его движением. В
зависимости от того, по какому параметру
осуществляется управление полетом или
в какой системе координат решаются
основные задачи навигации, различают
следующие способы вывода ЛА в заданную
точку:
ля
обеспечения полета ЛА по заданной
траектории необходимо непрерывно или
дискретно управлять его движением. В
зависимости от того, по какому параметру
осуществляется управление полетом или
в какой системе координат решаются
основные задачи навигации, различают
следующие способы вывода ЛА в заданную
точку:
маршрутный (траекторный);
путевой;
курсовой.
При маршрутном
способе задача навигации решается с
использованием ортодромической системы
координат, одной из осей которой служит
линия заданного пути (рис. 10). Для
осуществления управления полетом этим
способом необходимо знать линейное
боковое уклонение –Z ЛА
от маршрута (или его производную![]() ),
оставшееся расстояние –S и
назначенное время выхода в заданную
точку – Тн.
),
оставшееся расстояние –S и
назначенное время выхода в заданную
точку – Тн.
Задача управления ЛА сводится к выполнению следующих отношений:
 ,
где
,
где
 - требуемое значение путевой скорости;
- требуемое значение путевой скорости;
![]()
![]() -
фактическое значение путевой скорости.
-
фактическое значение путевой скорости.
Достоинством способа является высокая точность полета по заданной траектории. Недостатком является то, что между параметрами управления движением ЛА по маршруту и курсом полета отсутствует прямая связь.
Маршрутный способ применяется при ведении разведки, осуществлении посадки по курсоглиссадным радиомаякам, в системах РСБН и РСДН.
б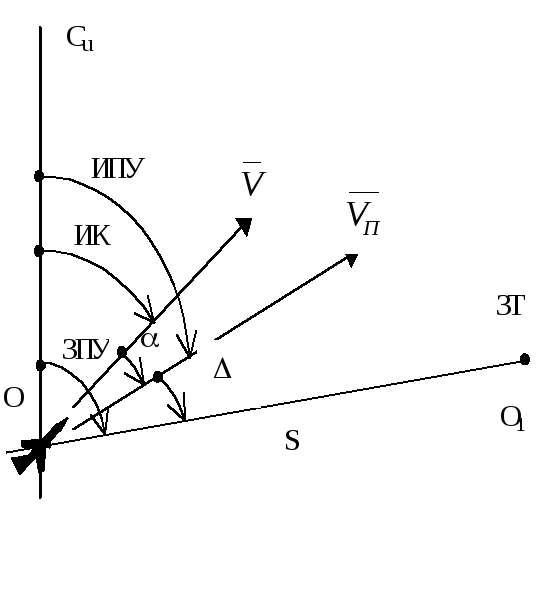 )При путевом способезадача навигации
решается в подвижной полярной системе
координат, начало которой (точка 0)
совпадает с центром масс ЛА, а полярной
осью является линия, соединяющая точку
0 с заданной точкой, О1(рис. 11), где
ЗПУ – заданный путевой угол. При угле
рассогласования= 0, полет ЛА происходит по кратчайшему
расстоянию, если0
(
)При путевом способезадача навигации
решается в подвижной полярной системе
координат, начало которой (точка 0)
совпадает с центром масс ЛА, а полярной
осью является линия, соединяющая точку
0 с заданной точкой, О1(рис. 11), где
ЗПУ – заданный путевой угол. При угле
рассогласования= 0, полет ЛА происходит по кратчайшему
расстоянию, если0
(![]() ),
то полет происходит по логарифмической
),
то полет происходит по логарифмической
Рис. 11. спирали на плоскости.
Путевой способ широко применяется на практике, когда известны координаты местонахождения ЛА и заданной точки, а также курс и угол сноса. При известных координатах ЛА можно определить расстояние S и ЗПУ и найти величину= ЗПУ – ИК -.
Зная назначенное время выхода ЛА в заданную точку – Тн, можно определить, при полете с постоянной скоростью, требуемое значение путевой скорости –
 , где Т – текущее
время.
, где Т – текущее
время.
Достоинством способа является возможность выхода ЛА на цель по кратчайшему пути в назначенное время, а недостатком – неточное следование по маршруту и выход на цель не строго с заданного направления.
Путевой способ применяется в доплеровских навигационных системах.
в )Курсовой способприменяется при
неизвестных значениях координат, угла
сноса и путевой скорости ЛА. Система
координат связана с ЛА, причем полярная
ось совпадает с продольной осью ЛА (рис.
12). Для выхода в заданную точку необходимо
выполнять условие=const
)Курсовой способприменяется при
неизвестных значениях координат, угла
сноса и путевой скорости ЛА. Система
координат связана с ЛА, причем полярная
ось совпадает с продольной осью ЛА (рис.
12). Для выхода в заданную точку необходимо
выполнять условие=const
![]() .
В этом случае при наличии ветра (
.
В этом случае при наличии ветра (![]() -
-
Рис. 12. вектор скорости ветра), траектория полета будет представлять радиодромию, названную так вследствие того, что по такой траектории осуществляется полет на радиостанцию с углом = 0, например, при пользовании радиокомпаса.
Достоинством способа является его простота. Недостатком – низкая точность полета по заданной траектории и низкая точность вывода в заданную точку.