

1 Назначение системы
Назначение системы ориентации и стабилизации (СОиС) рассматривается для двух типовых участков функционирования КА: перелет на орбиту функционирования (к исследуемой планете) и орбитальное движение.
Перечень типовых операций, выполняемых СОиС на участке перелета:
-гашение остаточных скоростей при разделении с разгонным блоком;
-поиск Солнца и успокоение;
-поддержание дежурной ориентации заданной оси на Солнце;
-построение базовой трехосной ориентации;
-трехосную ориентацию и стабилизацию КА относительно программного положения;
-перенацеливание КА в программное положение;
-стабилизацию КА относительно заданного программного положения во время коррекции орбиты.
На участке орбитального движения СОиС должна обеспечивать трехосную ориентацию и стабилизацию КА относительно заданного программного положения. Решение данной задачи позволяет выполнить коррекцию орбиты и разгрузку исполнительных органов, входящих в состав СОиС.
2 Состав системы
Типовой состав СОиС, осуществляющий коррекцию, программные развороты, трехосную ориентацию и стабилизацию КА, включает:
-гироскопический прибор (ГП);
-звездный датчик (ЗД);
-приборы ориентации на Солнце (ПОС) и на Землю (ПОЗ);
-двигатели-маховики (ДМ);
-блоки управления двигателями-маховиками (БУДМ), распределения питания и коммутации (БРПК) и усиления мощности (БУМ).
Также в состав системы ориентации и стабилизации функционально входит программное обеспечение (ПО) СОиС.
2.1 Гироскопический прибор
ГП представляет собой инерциальный прибор и предназначен для измерения и выдачи приращений интегралов от проекций угловых скоростей спутника на оси чувствительности прибора. Широкое применение в настоящее время нашли КГП с чувствительными элементами на базе динамически настраиваемых гироскопов.
Новое поколение инерциальных приборов – это приборы на базе волоконно-оптических гироскопов (ВОГ) – приборы будущего широкого применения, способные решать основные задачи СУОиС. В РФ (ЦНИИмаш) созданы базовые образцы нового семейства таких приборов: малогабаритная система МБИНС-98, высоконадежная система ВБИНС-2000, блок датчиков угловых скоростей БДУС-99, блок жестко установленных акселерометров ЖАКС-99.
Принцип действия волоконно-оптического гироскопа представлен на рисунке.
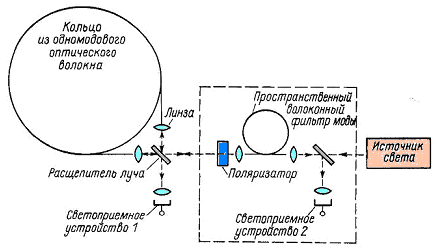
Принцип действия волоконно-оптического гироскопа
Данные системы предназначены для измерения угловой скорости МКА относительно связанных осей и выдачи сигналов в СУОиС, а также в БВС КА.
В состав систем входят:
-три волоконно-оптических гироскопа, оси чувствительности которых расположены ортогонально;
- акселерометры (для некоторых систем);
-блок электроники, состоящий из источника питания, блока обработки выходного интерфейса с информационным и телеметрическими выходами.
Отличительными признаками данных систем являются:
-применение датчиков, изготовленных по твердотельной волоконно-оптической и кварцевой технологий; высокое значение ресурса (свыше 10 тысяч часов), а, в случае необходимости, до 50…100 тысяч часов;
-функциональная готовность – единицы секунд; неограниченное число включений без ограничения времени между соседними включениями;
-практически постоянное энергопотребление на всех режимах работы;
-завершенность системы, включающей в свой состав датчики, электронные блоки, специальный вычислитель (СВ), вторичные источники питания (ВИП) с базовым интерфейсом.
Основные технические характеристики приборов КГП (принятые обозначения: ГР – гироскопы, АКС – акселерометры, СВ - спецвычислитель, ВИП - вторичный источник питания) приведены в таблице.
Характеристика |
Тип прибора |
|||
МБИНС-98 |
БДУС-99 |
ЖАКС-99 |
ВБИНС-2000 |
|
Масса, кг |
0.8 |
0.5 |
0.25 |
3 |
Энергопотребление (U=27 В), Вт |
8 |
6 |
3 |
20 |
Точность |
1
- 10
|
0,01-0,001 |
0,01-0,001 % |
0.05-0,1 |
Состав |
3 ГР,3АКС, СВ, ВИП |
3 ГР, СВ, ВИП |
3 АКС, СВ, ВИП |
6 ГР, 6 АКС, 2 СВ, 2 ВИП |
Акселерометры измеряют линейные ускорения, а точнее - кажущееся ускорение. Принцип измерения - электрические сигналы пропорциональны ускорению.
Акселерометры различаются принципом работы, массово-габаритными характеристиками, диапазоном измерения, порогом чувствительности и др.
Классификация акселерометров по:
-зависимости между измеряемым ускорением и выходным сигналом (линейные, релейные и др.);
-перемещению инерционной массы (линейные, маятниковые);
-способу подвеса инерционной массы (пружинный, механический, гидравлический, комбинированный).
Наибольшее применение нашли маятниковые акселерометры кварцевого типа. Они имеют одну ось чувствительности. Состав маятникового акселерометра:
-чувствительный элемент – маятник с подвесом из кварцевой пластиныж
-магнитно-электрический датчик момента (его катушка закреплена на маятнике);
-датчик угла ( в основном, емкостного типа, его обкладка закреплена на маятнике).
Принцип работы. При движении акселерометра с ускорением инерционный момент, действующий на маятник, парируется системой обратной связи (датчик угла, датчик момента и усилитель); информационный сигнал – ток в обмотке датчика момента.