

Тема 4. Проектирование двигательных установок (ду) ка
Назначение, анализ требований, формирование состава и структуры, их возможных альтернатив. Функционирование ДУ. Выбор основных обобщенных характеристик.
Лекция 10-13.
1. Назначение установки
Двигательная установка (ДУ) КА предназначена для:
-довыведения КА на рабочую орбиту;
-успокоения КА после отделения от разгонного блока;
-проведения режимов построения заданной ориентации;
-проведения коррекции орбиты на различных этапах полета для поддержания группировки КА;
-стабилизации КА при проведении коррекций;
-обеспечения заданных требований по точности управления ориентацией МКА при отказе электромеханических и электромагнитных исполнительных органов системы ориентации и стабилизации.
Формирование проектного облика ДУ включает решение следующих основных задач:
-выбор компонентов топлива, типа двигателя, системы подачи топлива;
-расчет по потребным запасам топлива объемов топливных баков и газа наддува;
-разработка принципиальных пневмогидравлических схем (ПГС) ДУ с учетом апробированных схемных решений по агрегатам и элементам;
-проведение предварительных проработок конструкции ДУ с оценкой массовых характеристик.
На КА широкое применение нашли следующие типы ДУ:
-электрореактивная (на базе стационарных плазменных двигателей);
-двухкомпонентная (окислитель - азотный тетраксид (АТ), горючее – несимметричный диметилгидразин (НДМГ));
-однокомпонентная (в качестве монотоплива используется гидразин) в двух версиях: с газобаллонной системой вытеснения топлива и с совмещенной системой вытеснения и хранения топлива;
-на холодном газе (в качестве рабочего тела используется азот или гелий).
При построении принципиальной схемы ДУ учитывается необходимость надежного функционирования ДУ на всех этапах его работы. Повышение надежности функционирования ДУ связано с количеством дублирующих элементов в составе пневмогидросистемы (ПГС), что приводит к увеличению массы ДУ. Взаимодействие ДУ с системой управления бортовой аппаратурой осуществляется через блоки коммутации, вторичные источники питания и другие элементы, которые конструктивно не входят в состав анализируемых ДУ.
2 Состав, структура и функционирование установки
2.1. Двигательная установка на стационарном плазменном двигателе (спд)
Электрореактивные двигатели (ЭРД) являются эффективным средством довыведения КА на рабочие орбиты, поддержания орбитальных структур. Высокий удельный импульс, возможность регулирования в широких пределах выходных характеристик, приемлемые значения массы и габаритов двигательной установки на базе СПД определяют эффективность их применения на КА.
Основные успехи в этой области космической технологии в РФ связаны с разработкой и практическим использованием ЭРД следующих типов: двигателей электронагревных (ДЭН), стационарных плазменных двигателей (СПД) и двигателей с анодным слоем (ДАС).
Электронагревный двигатель имеет низкий удельный импульс (до 300с) и, соответственно, ограниченную область применения. Поэтому для рассматриваемой задачи наибольший интерес представляют СПД и ДАС. При этом СПД несомненно, находится в лучшем положении за счет того, что в 70-е годы была создана эффективная кооперация внутри РФ.
Начало практического использования СПД в России было положено в 1972 году летно-космическими испытаниями установки ЭОЛ-1 на ИСЗ “Метеор”. Установка ЭОЛ-2, успешно отработала в составе такого же ИСЗ более 600 часов. В последующие годы ДУ с СПД стали штатными системами ИСЗ “Метеор” и “Метеор-Природа” производства ВНИИЭМ, а с 1982 года начались испытания и рабочая эксплуатация СПД на геостационарных спутниках связи, прорабатываемых НПО ПМ им. М.Ф. Решетнева. Параметры летных образцов двигателей ОКБ “Факел” приведены в таблице, а общий вид СПД мощностью 200 Вт на рисунке.
Марка двигателя |
СПД-25М1 |
СПД-35 |
СПД-50 |
СПД-70 |
Тяга, мН |
6 |
10 |
17,3 |
40 |
Потребляемая мощность, Вт |
104 |
200 |
310 |
700 |
Удельный импульс, Нс/кг |
8800 |
13000 |
11600 |
15000 |
Ресурс, подтвержденный наземными испытаниями ресурс, час |
- |
2500 |
1500 |
3000 |
Полный импульс тяги, кНс |
- |
- |
110 |
430 |
Масса, кг |
0,25 |
0,4 |
0,7 |
2 |
Уровень разработки |
- |
- |
Летный образец |
Летный образец |

Общий вид СПД мощностью 200 Вт
Структурная схема ДУ на базе СПД представлена на рисунке.

Структурная схема ДУ на базе СПД
ДУ состоит из двигательного блока (ДБ), системы хранения и подачи (СХП), состоящей из систем подачи (СП) и хранения (СХ) ксенона и системы преобразования и управления (СПУ), связанной кабелем с бортовым комплексом управления (БКУ) и системой энергопитания (СЭП) космического аппарата.
Двигательный блок (ДБ) включает в себя двигательный модуль, например, на базе СПД-50, с катодом-компенсатором, блок газораспределения, датчики температуры, входной штуцер подачи рабочего газа, электрические соединители.
Двигательный модуль состоит из анодного и катодного блоков. В состав анодного блока входят: разрядная камера, анод и магнитная система, состоящая из наружного и внутреннего магнитных полюсов, несущего магнитопровода, катушек намагничивания. Катушки намагничивания последовательно включены в разрядную цепь двигателя.
Разрядная камера выполнена из изоляционного керамического материала в виде протяженного коаксиального канала, открытого с одной стороны и закрытого с другой. В глубине разрядной камеры размещается коробчатый кольцевой анод, который соединяется с днищем разрядной камеры. От днища анода отходит газопровод, который служит для подвода рабочего тела через анод в канал камеры. От корпуса модуля анод электрически изолирован с помощью газоэлектрической развязки, выполненной на основе керамики. Магнитная система является силовым каркасом модуля.
В состав двигателя включен катод-компенсатор, который установлен на анодный блок при помощи катодного кронштейна. В основу конструкции катода-компенсатора положена схема полого катода с подогреваемым эмиттером электронов. Эмиттер помещен в капсуле из молибденового сплава. Капсула с эмиттером установлена внутри спирального нагревателя. Для уменьшения тепловых потерь нагреватель окружен тепловыми экранами, изготовленными из вольфрам-рениевой фольги. Газопровод служит для подвода рабочего тела к катоду. От корпуса катод электрически изолирован с помощью газоэлектрической развязки, выполненной на основе соединения “металл-керамика”. Пусковой электрод катода выполнен в виде полого цилиндра, закрепленного на изоляторе.
Структуру СПУ можно представить как систему, состоящую из следующих подсистем:
-электропитания (преобразователь);
-приема команд и управления работой двигателя (блоки управления и коммутации);
-регулирования тока разряда двигателя;
-фильтрация электрических колебаний разряда двигателя.
Каждая из первых двух подсистем в общем случае независимо друг от друга связана с системами КА.
Подсистема электропитания обеспечивает необходимые для работы двигателя:
-разрядное напряжение;
-напряжение накала катодов;
-напряжение питания термодросселя блока газораспределения (БГР);
-поджигные импульсы;
-дополнительное подмагничивание магнитных катушек двигателя;
-питание катушек элекгроклапанов.
За исключением питания электроклапанов все источники гальванически изолированы от бортового источника питания МКА.
Источник разрядного напряжения является нерегулируемым источником стабилизированного напряжения (в диапазоне рабочих значений тока разряда) и выдерживает пульсации разряда двигателя и переходные процессы при зажигании разряда. Источник накала катодов является источником постоянного тока с задаваемым значением тока. Его нагрузка - низкоомная, резистивная, с возрастающей температурной характеристикой.
Основу СХП составляет система хранения (СХ) и система питания (СП) рабочего тела (ксенона). СХ содержит бак с ксеноном, заправочный клапан (ГЗ), пироклапан (ПК). СП ксенона включает ресивер низкого давления, редукционный клапан (РЭК), электроклапаны (КУ), гидравлически соединенные последовательно. На входе системы подачи имеются фильтр (Ф) и проверочный клапан (ПУ), датчики высокого давления (ДД), на выходе - датчики низкого давления (ДД).
Типовой блок СХП включает баки с раздельными каналами подачи рабочего тела (основным и резервным). Каждый канал снабжен редуктором-регулятором давления и запорными клапанами. Каналы на выходе объединяются в общую магистраль, по которой производится подача рабочего тела в двигатель. На входе в двигатель установлен блок газораспределения, который осуществляет регулировку расхода рабочего тела между анодом и катодом-компенсатором.
Экспериментальные зависимости тяги, мощности, удельного импульса и анодного тока от массового расхода и анодного напряжения приведены на рисунках. Экспериментальные зависимости позволяют выбрать режимы работы двигателя (анодное напряжение Uа и массовый расход рабочего тела m), соответствующие выходным характеристикам: тяге Т, мощности N и удельной тяге Руд. Значения параметров приведены в зависимости от массового расхода и анодного напряжения.


Изменение тяги Изменение мощности
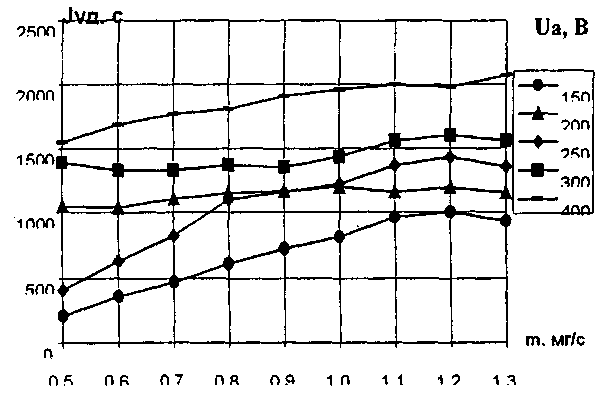

Изменение удельной тяги Изменение анодного напряжения