

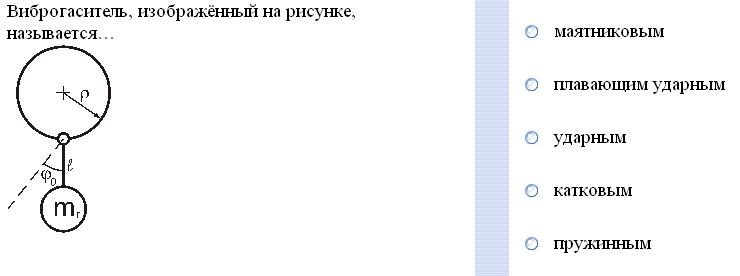
1.2.Структурный анализ механизмов
24. Задача структурного анализа пространственных рычажных механизмов – это определение:
а) угловых скоростей
б) приведённой силы
в) линейных ускорений
г) состава структуры
д) положений звеньев
е) маневренности
26. Вид классификации механизма с точки зрения определения его принципа образования:
а) по функциональному назначению
б) кинематическая
в) структурно-конструктивная
г) структурная
д) силовая
27. Вид анализа механизма, при проведении которого исследуют его состав, называется _____ анализом
а) кинематическим;
б) силовым;
в) структурным;
г) динамическим;
д) составным
28. Механизм, по Асуру, состоит из _____ механизмов и последовательно присоединённых структурных групп Ассура
а) первичных;
б) однозвенных;
в) кривошипных;
г) ползунных.
29. Задача структурного анализа пространственных рычажных механизмов – это определение …
а) положений звеньев
б) степени подвижности
в) угловых ускорений
г) линейных скоростей
30. …называются независимые между собой координаты звеньев механизма, однозначно определяющие положения всех его звеньев
начальными
обобщенными
нормальными
избыточными
31. …Число степеней свободы механизма с голономными (не зависящими от скорости ) связями равно числу…. координат
□ начальных
□ нормальных
□ обобщенных
□ избыточных
32. Звено, которому приписывается одна или несколько обобщенных координат, называется
□ начальным
□ входным
□ выходным
□ промежуточным
33. Механизм, по Асуру, состоит из первичных механизмов и последовательно присоединённых _____ групп Ассура.
а) первичных;
б) структурных;
в) многозвенных;
г) кинематических.
34. Степень подвижности структурной группы Ассура равна
а) 0
б) 2
в) 1
г) 3
д) 5
е) 4
35. Элемент машинного агрегата, предназначенный для реализации функций контроля и управления работой привода.
а) энергетическая машина
б) контрольно-управляющая машина
в) рабочая машина
г) передаточный механизм
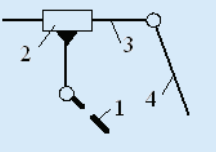
36. Соответствие числа условий связей примерам первичных механизмов:
2 |
|
3 |
|
1 |
|
|
|
 (1)
(1) (2)
(2)
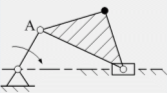
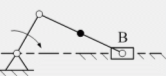
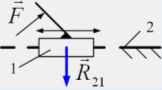
37. Первичный механизм с числом связей равный четырём …
а)

б)

в)

г)

38. Первичные механизмы с числом связей равный трём …
а)
б)
в)
г)
39. Группой Ассура является кинематическая цепь …

 +
+
40. Число степеней свободы плоского рычажного механизма определяются по формуле …
□ Чебышева
□ Малышева - Сомова
□ Озола
□ Новикова
41. Формула, применяемая для определения степени подвижности пространственной кинематической цепи …
а) Ассура
б) Жуковского
в) Чебышева
г) Малышева
42. Плоский рычажный механизм, структурная формула которого имеет вид I-III - III, - это механизм … класса
□ 3
□ 2
□ 1
□ 5
43. Число степеней свободы кинематической цепи относительно _____ звена, называется степенью подвижности кинематической цепи.
а) неподвижного;
б) входного;
в) выходного;
г) промежуточного.
44. Кинематическая пара, имеющая одну связь, - это … пара
□ одноподвижная
□ двухподвижная
□ трехподвижная
□ четырехподвижная
□ пятиподвижная
45. Кинематическая пара, имеющая две связи, - это… пара
□ одноподвижная
□ двухподвижная
□ трехподвижная
□ четырехподвижная
□ пятиподвижная
46. Кинематическая пара, имеющая три связи, - это… пара
□ одноподвижная
□ двухподвижная
□ трехподвижная
□ четырехподвижная
□ пятиподвижная
47. Кинематическая пара, имеющая четыре связи, - это… пара
□ одноподвижная
□ двухподвижная
□ трехподвижная
□ четырехподвижная
□ пятиподвижная
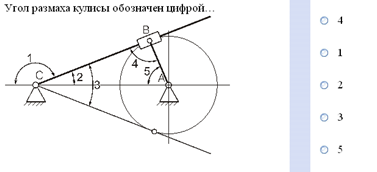
4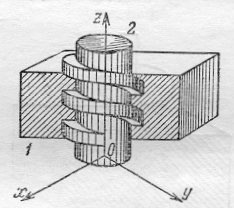 8.
Класс кинематической пары …
8.
Класс кинематической пары …
1) 2
2) 3
3) 4
4) 5
49. Степень подвижности «СФЕРИЧЕСКОЙ» кинематической пары равна _____ .
а) единице;
б) двум;
в) трем;
г) четырем.
50. Кинематическая пара, имеющая пять связей, - это… пара
□ четырехподвижная
□ пятиподвижная
□ одноподвижная
□ двухподвижная
□ трехподвижная
51. Степень подвижности кинематической пары «Шар – Плоскость» равна
а) трем;
б) единице;
в) двум;
г) пяти.
52. Количество ограничений налагаемые на относительное движение каждого звена кинематической пары первого класса:
а) пять
б) четыре
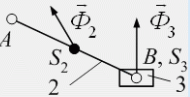
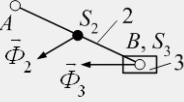
в) шесть
г) одно
д) два
53. Формула Чебышева для расчета плоского механизма имеет вид …
ΔW = 3n – (2p5 + p4) + q
ΔW = 3n – (2p5 + p4) - q
ΔW = 6n – (2p5 + p4) + q
ΔW = 6n – (2p5 + p4) - q
54. Число звеньев n в группе Ассура и число кинематических пар пятого класса p5 связаны соотношением…
 +
+

55. Соответствие структурных формул примерам структурных групп второго класса второго порядка:
ПВП Поступательная Вращательная Поступательная |
|
ВПВ Вращательная Поступательная Вращательная |
|
ВВП Вращательная Вращательная Поступательная |
|
|
|
 (3)
(3)
 (2)
(2) (1)
(1)
56. Кинематическая пара
относится к … классу
1
3
4
2
5
57. Кинематическая пара относится к … классу
3
2
1
5
4
58. Кинематическая пара является
низшей
высшей
промежуточной
59. Кинематическая пара
 является
является
низшей
высшей
промежуточной
60. Число степеней свободы механизма
 равно
равно
0
1
2
-1
61. Число степеней свободы механизма
 равно
равно
0
1
2
-1
62. Кинематическая цепь
![]() является группой Ассура …
является группой Ассура …
2 класса, 1 порядка
2 класса, 2 порядка
3 класса, 2 порядка
2 класса, 3 порядка
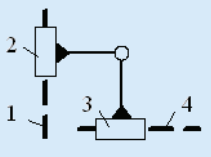
63. Кинематическая цепь
![]() является группой Ассура …
является группой Ассура …
2 класса, 1 порядка
2 класса, 2 порядка
3 класса, 2 порядка
2 класса, 3 порядка
65. Класс группы Ассура определяется
числом звеньев в группе
числом кинематических пар
классом кинематических пар
видом кинематической цепи
66. Порядок группы Асура определяется …
числом звеньев в группе
числом свободных элементов кинематических пар
числом звеньев, не имеющих свободных поводков
числом кинематических пар
67. Класс механизма определяется …
классом самой сложной группы Ассура
классом наиболее простой группы Ассура
классом группы начальных звеньев
видом кинематической цепи механизма
68. Степень подвижности механизма и его класс…

1) W=1, механизм II класса
2) W=2, механизм I класса
3) W=1, механизм I класса
4) W=2, механизм II класса
 +
+
2. Синтез и анализ механизмов с низшими парами
2.1. Кинематическое исследование плоских рычажных механизмов
№3
71. Параметры, определяемые при кинематическом анализе механизмов.
а) движущая сила
б) движущий момент
в) угловое ускорение
г) сила тяжести
д) угловая скорость
е) момент сопротивления
72. Вид анализа механизмов, при проведении которого определяются линейные ускорения отдельных точек звеньев механизма…
а) кинематический
б) динамический
в) структурный
г) силовой
73. Правильная последовательность выполнения кинематического анализа плоского рычажного механизма:
Строится план ускорений (6)
Выбирается масштаб чертежа механизма (3)
Вычерчивается кинематическая схема механизма по заданному положению ведущего звена (4)
Проводится структурный анализ и классификация механизма по Асуру (2)
Выбирается ведущее звено (1)
Строится план скоростей (5)
74. Неверно, что кинематическими характеристиками являются …
□ траектории точек
□ обобщенные координаты
□ силы трения
□ скорости точек и звеньев механизма
□ равномерность вращения начального звена
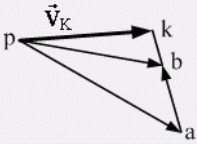
76. Последовательность определения скоростей характерных точек механизма
а)
 (1)
(1)
б)
 (4)
(4)
в)
 (3)
(3)
г)
 (2)
(2)
77. Последовательность определения скоростей характерных точек механизма.
-
 (3)
(3)
-
 (4)
(4)
-
 (2)
(2)
-
 (1)
(1)
78. Последовательность определения скоростей характерных точек механизма.
-
 (3)
(3)
-
 (4)
(4)
-
 (1)
(1)
-
 (2)
(2)
79. Последовательность определения скоростей характерных точек механизма
-
 (2)
(2)
-
 (3)
(3)
-
 (4)
(4)
-
 (1)
(1)
80. Последовательность определения скоростей характерных точек механизма
-
 (4)
(4)
-
 (3)
(3)
-
 (2)
(2)
-
 (1)
(1)
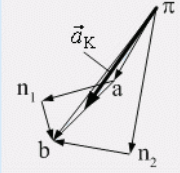
81. Последовательность определения ускорений характерных точек механизма.
-
 (2)
(2)
-
 (3)
(3)
-
 (4)
(4)
-
 (1)
(1)
82. Соответствие схем механизмов планам скоростей.
|
|
|
|
|
|

 (1)
(1) (2)
(2)

83. Соответствие схем механизмов планам ускорений.
|
|
|
|
|
|

 (1)
(1)
 (2)
(2)
85. Центростремительное ускорение точки звена, совершающего плоское движение, рассчитывается по формуле…
aω = ω2L
aω = ω L2
aω = ω 2 /L
aω = ω /L2
86. Вращательное ускорение точки звена, совершающего плоское движение, рассчитывается по формуле…
aε = εL2
aε = εL
aε = ε /L2
aε = ε /L
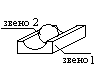
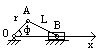
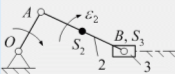
87. Угловая скорость шатуна 2 в заданном положении механизма равна …

ω 1 = 10 рад/с
ОА = 0,02 м
АВ = 0,1 м
10 рад/с
2 рад/с
0
20 рад/с
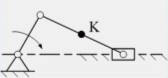
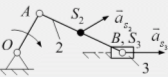
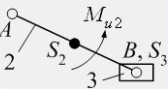
88. Угловая скорость шатуна 2 в заданном положении механизма равна …
![]()
ω 1 = 10 рад/с
ОА = 0,02 м
АВ = 0,1 м
10 рад/с
2 рад/с
0
20 рад/с
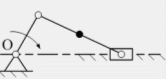
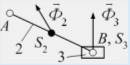
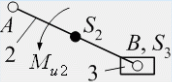
89. Ускорение ползуна 3 в заданном положении механизма равно …
![]()
ω 1 = 10 рад/с
ОА = 0,02 м
АВ = 0,1 м
2 м/с2
2,4 м/с2
0
1,6 м/с2
90. Функция положения точки В
кривошипно-ползунного механизма
![]() ,
где А – постоянная величина;
,
где А – постоянная величина;
![]()
Кинематическая передаточная функция скорости точки В …
91. Функция положения точки В кривошипно-ползунного механизма , где А – постоянная величина.
Кинематическая передаточная функция скорости точки В…
92. Кинематическая передаточная функция
скорости точки В кривошипно-ползунного
механизма
![]() .
.
Кинематическая передаточная функция ускорения точки В…
3. Синтез и анализ механизмов с высшими кинематическими парами
3.1. Синтез зубчатых механизмов
95. Одинаковыми должны быть такие параметры зубчатых колес, находящихся в зацеплении, как …
□ коэффициент смещения
□ диметры делительных окружностей
□ модуль
□ угол профиля
□ толщина зуба по делительной окружности
96. Параметры зубчатого колеса, не зависящие от смещения инструмента при нарезке, - это …
□ диаметр делительной окружности
□ толщина зуба по делительной окружности
□ межосевое расстояние
□ коэффициент торцевого перекрытия
97. Параметры зубчатого колеса, не зависящие от смещения инструмента при нарезке, - это …
□ толщина зуба по делительной окружности
□ межосевое расстояние
□ коэффициент торцевого перекрытия
□ диаметр основной окружности
101. Зубчатые колеса, у которых толщина зуба по делительной окружности равна ширине впадины, - это колеса с … шагом
□ равноделенным
□ симметричным
□ делительным
□ несимметричным
102. Назначаемый коэффициент смещения X при числе зубьев нарезаемого колеса ZZmin …
□ равен 0
□ отрицателен
□ положителен
□ равен 1
103. Назначаемый коэффициент смещения X при числе зубьев нарезаемого колеса Z=Zmin …
□ равен 0
□ отрицателен
□ положителен
□ равен 1

№3
104. Коэффициент торцевого перекрытия для нормальной работы цилиндрической зубчатой передачи должен быть …
□ меньше 1
□ больше 1
□ равен 1
□ равен 0

№2
105. Окружность зубчатого колеса, шаг, модуль и угол профиля которой равны шагу, модулю и углу профиля исходного производящего контура, называют …
□ делительной окружностью
□ основной окружностью
□ окружностью вершин зубьев
□ окружностью впадин зубьев
106. Коническую зубчатую передачу, в которой угол между осями колес равен 90, называют …
□ ортогональной
□ косозубой
□ прямозубой
□ круглозубой
107. Шаг зубчатого колеса по делительной окружности определяется уравнением …
p = π·m
p = π/m
p = m /π
p = 2πm
108. Диаметр делительной окружности зубчатого колеса определяется по формуле …
d = mZ
d = m(Z + 2ha)
d = m(Z + 2ha + 2X)
d = (mZ)/2
109. Диаметр окружности вершин нулевого цилиндрического зубчатого колеса определяется по формуле …
d = m(Z + 2,5ha)
d = m(Z + 2ha)
d = m(Z – 2,5ha)
d = m(Z - 2ha)
111. Диаметр окружности впадин нулевого цилиндрического зубчатого колеса определяется по формуле …
d = m(Z + 2,5ha)
d = m(Z + 2ha)
d = m(Z - 2,5ha)
d = m(Z - 2ha)
112. Расположение делительной (средней) прямой режущего инструмента и делительной окружности нарезаемого колеса при положительном смещении режущего инструмента …
□ не имеют общих точек
□ пересекаются в 2-х точках
□ касаются в одной точке
□ взаимно перпендикулярны
113. Расположение делительной прямой режущего инструмента и делительной окружности нарезаемого колеса при отрицательном смещении режущего инструмента …
□ не имеют общих точек
□ пересекаются в 2-х точках
□ касаются в одной точке
□ взаимно перпендикулярны
114. Расположение делительной прямой режущего инструмента и делительной окружности нарезаемого колеса при нулевом смещении режущего инструмента …
□ не имеют общих точек
□ пересекаются в 2-х точках
□ касаются в одной точке
□ взаимно перпендикулярны
118.Смещение рейки от центра заготовки считается …
положительным
отрицательным
нулевым
119. При нарезании нулевого зубчатого колеса делительная (средняя) прямая инструментальной рейки касается
окружности вершин колеса
делительной окружности колеса
основной окружности колеса
окружности впадин
120. Положительное смещение инструментальной рейки применяют при нарезании колеса для …
исключения заострения зубьев
избежания подрезания зубьев у колёс с малым числом зубьев
увеличения коэффициента торцевого перекрытия
увеличения толщины зубьев по окружности вершин
121. Полюс эвольвентного зацепления находится в точке пересечения межосевой линии и …
основной окружности
линии зацепления
окружности вершин
окружности впадин
122. При изменении межосевого расстояния эвольвентного зацепления передаточное отношение …
увеличивается
уменьшается
не изменяется
123. Точка производящей прямой описывает эвольвенту при обкатывании по … окружности
длительной
начальной
основной
вершин
впадин
124. Модуль зубьев с окружным шагом по длительной окружности
p = 9,425 мм равен …
3 мм
29,61 мм
4,713 мм
9,425 мм
125. Межосевое расстояние нулевой зубчатой передачи с модулем m = 2 мм, числом зубьев колёс:
z1 = 20, z2 = 40, равно …
40 мм
120 мм
60 мм
80 мм
126. Коэффициент торцевого перекрытия
прямозубой эвольвентной передачи с
числом зубьев первого колеса z1
= 18 и углом перекрытия
![]() равен …
равен …
0,698
1,43
0,0278
2,87
3.2. Анализ зубчатых механизмов
117. … зацепление – это зацепление, при котором угловые скорости вращения w1 и w2 имеют одинаковые знаки
внутреннее
внешнее
эвольвентное
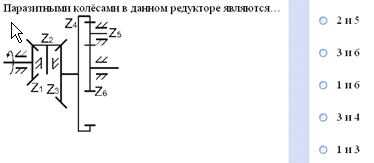
98. Степень подвижности планетарной зубчатой передачи …
□ W=1
□ W1
□ W1
□ W=0
99. Степень подвижности дифференциального зубчатого механизма …
□ W=1
□ W1
□ W1
□ W=0
127. … - это многозвенные зубчатые механизмы с подвижными осями колёс и числом степеней свободы w = 1.
планетарные зубчатые передачи
дифференциальные зубчатые механизмы
многоступенчатые
128. … - это многозвенные зубчатые механизмы с подвижными осями колёс и степенью подвижности w > 1
планетарные зубчатые передачи
дифференциальные зубчатые механизмы
многоступенчатые
129. Сателлиты, водило, центральное колесо, опорное колесо – это элементы … зубчатого механизма
дифференциального
планетарной передачи
с неподвижными осями колёс
многоступенчатого
130. Признаки, определяющие внешнее зацепление, заключается в том, что …
угловые скорости вращения звеньев имеют одинаковые знаки
угловые скорости вращения звеньев имеют разные знаки
полюс зацепления лежит вне отрезка линии зацепления
линия зацепления проходит через оси колёс
131. Зубчатые цилиндрические передачи относятся к передачам с … расположением осей
параллельным
скрещивающимся
пересекающимся
132. Зубчатое зацепление, при котором угловые скорости колёс имеют разные знаки, - это … зацепление
внутреннее
внешнее
нулевое
равносмещёноое
133. Передаточное отношение многоступенчатой передачи равно … передаточных отношений отдельных передач, ее образующих.
□ произведению
□ отношению
□ сумме
□ разности
134. Передаточное отношение зубчатой передачи от звена1 к звену3 равно ..
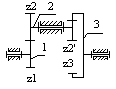
z1 = 20, z2 = 40, z2’ = 20, z3 = 80
8
32
-8
-2
135. Передаточное отношение зубчатой передачи от звена1 к звену3 равно …
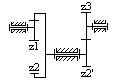
z1 = 20, z2 = 80, z2’ = 20, z3 = 40
-2
8
-8
32
№1
 №5
№5
 №4
№4
3.3. Синтез кулачковых механизмов
136. Габаритные размеры кулачкового механизма при увеличении угла давления …
□ увеличиваются
□ уменьшаются
□ не изменяются
137. Опасность заклинивания кулачкового механизма при ведущем толкателе и силовом замыкании контакта характерна для фазы …
□ удаления
□ сближения
□ верхнего выстоя
□ нижнего выстоя
138. Преимущественное использование в кулачковых механизмах толкателей с роликовым наконечником связано с …
□ уменьшением трения
□ возможностью выстрой замены ролика при изнашивании
□ снижение шума
□ исключением заклинивания
139. Замыкание кулачкового механизма осуществляют … способом
□ силовым
□ геометрическим
□ механическим
□ фрикционным
140. Рабочий цикл кулачкового механизма состоит из фаз …
□ удаления толкателя
□ верхнего выстоя толкателя
□ приближения толкателя
□ нижнего выстоя толкателя
141. Угол давления для кулачковых механизмов с коромысловым толкателем удовлетворяет условию…
15° ≤ νдоп ≤ 30°
20° ≤ νдоп ≤ 45°
νдоп = 90°
νдоп = 0
142. Угол давления для кулачковых механизмов с поступательно движущимся толкателем удовлетворяет условию…
15° ≤ νдоп ≤ 30°
20° ≤ νдоп ≤ 45°
νдоп = 90°
νдоп = 0
144. Диаграмму перемещения толкателя кулачкового механизма получают путем графического … диаграммы аналога скорости толкателя
□ интегрирования
□ дифференцирования
□ экстраполирования
□ суммирования
146. «Мягкие» удары характерны для кулачкового механизма с … выходного звена.
синусоидальным изменением ускорения
косинусоидальным изменением ускорения
параболическим изменением координаты
линейным изменением координаты
147. «Жёсткие» удары характерны для кулачкового механизма с … выходного звена.
синусоидальным изменением ускорения
косинусоидальным изменением ускорения
параболическим изменением координаты
линейным изменением координаты
148. Безударным является закон движения выходного звена с …
синусоидальным изменением ускорения
косинусоидальным изменением ускорения
параболическим изменением координаты
линейным изменением координаты
149. Углом давления называют угол между … и вектором скорости конца выходного звена.
вектором скорости точки контакта, принадлежащей кулачку
нормально к профилю кулачка в точке контакта
касательной к профилю кулачка в точке контакта
вектором нормальной реакции, действующей на выходное звено
150. Ролик в кулачковом механизме устанавливают на выходное звено для …
уменьшения размеров
уменьшение трения
увеличение нагрузочной способности
исключения отрыва выходного звена от кулачка

№5

№4
4. Силовой анализ и уравновешивание механизмов
4.1. Силовой анализ механизмов
151. Задача силового анализа плоских механизмов – это определение …
а) возможных положений звеньев
б) подвижности и состава структуры
в) реакций кинематических пар
г) линейных скоростей и ускорений
д) угловых скоростей и ускорений
153. Соответствие видов кинематических пар ПЛОСКИХ механизмов схемам действия реакции связей (силами трения пренебречь):
вращательная кинематическая пара (1) |
|
|
|
высшая кинематическая пара (2) |
|
 (2)
(2)
 (1)
(1)
154. Направление действия векторов сил
инерции …

а)

б)
в)

г)
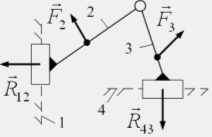
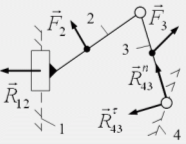
155. Соответствие схем структурных групп уравнениям равновесия:
|
|
|
|
|
(2) |
 (2)
(2)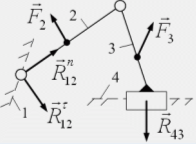 (1)
(1)
157. Соответствие схем структурных групп количеству неизвестных:
|
4 |
2 (1) |
|
|
1 |
3 (2) |
 (1)
(1) (2)
(2)
158. Соответствие схем механизмов направление сил инерции …
|
|
|
|
|
|
|
|
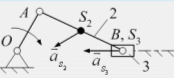 (1)
(1) (1)
(1)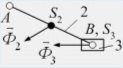 (2)
(2) (2)
(2)
159. Соответствие уравнений равновесия структурных групп количеству неизвестных:
|
4 (2) |
|
2 (3) |
|
3 (1) |
|
1 |
160. Направление действия моментов пар
сил инерции …
а)
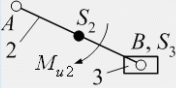
б)
в)
г)

162. Обобщенная форма уравнения для расчета приведенного момента сил, приложенных к j-му звену, совершающему поступательное движение, имеет вид …
 +
+

163. Мощность, затрачиваемая на преодолении сил трения в поступательной паре, рассчитывается по формуле…
 +
+

164. Вектор силы трения направлен противоположно вектору …
□ скорости
□ ускорения
□ угловой скорости
□ тяжести
165. Направление силы трения … направлением вектора скорости
□ совпадает с
□ противоположно направлению
□ перпендикулярно направлению
□ образует определенный угол с
166. Силовой расчет механизмов с учетом сил инерции звеньев называют …
□ кинематическим
□ кинетостатическим
□ инерционным
□ уравновешивающим
167. Силовой расчет механизма начинается с … звена
□ начального
□ выходного
□ произвольно выбранного
□ ведущего
168. Момент теоретической пары сил, действующий на начальное звено с целью обеспечения заданного закона движения, называется …момент.
Уравновешивающий
Движущий
Обобщенный
приведенный
169. Сила, действующая на начальное звено и обеспечивающая заданный закон ее движения, называется:
□ уравновешивающей
□ движущей
□ полезного сопротивления
□ трения
171. Уравновешивающая сила приложена к … звену механизма
□ начальному
□ выходному
□ наиболее нагруженному
□ наименее нагруженному
172. Кинетостатический метод расчета механизмов основан на учете сил и моментов сил… звеньев
□ инерции
□ полезного сопротивления
□ трения
□ тяжести
175. Угол между шатуном и коромыслом шарнирного четырёхзвенного механизма, называется угол ….
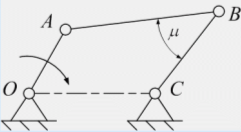
трения
давления
передачи движения
176. Угол передачи движения с уменьшением
угла давления …
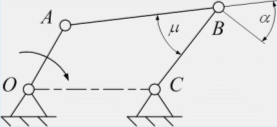
а) уменьшится
б) увеличится
в) не изменится
177. Мощность, затрачиваемая на преодоление сил трения во вращательной паре, рассчитывается по формуле…
178. Приведенный момент инерции измеряется в …
□ кгм2
□ кгм
□ кг / м2
□ нм2
□ н / м2
179. Кинетостатический метод расчета механизмов основан на учете …
□ сил и моментов инерции звеньев
□ уравновешивающей силы
□ сил внутреннего взаимодействия звеньев
□ уравновешивающей силы и сил внутреннего взаимодействия звеньев
180. Звену, совершающему плоскопараллельное движение, соответствует инерционная нагрузка
Ф = 0, Мф = 0
Ф ≠ 0, Мф = 0
Ф ≠ 0, Мф ≠ 0
Ф = 0, Мф ≠ 0
181. Звену, совершающему вращательное движение, соответствует инерционная нагрузка
Ф = 0, Мф = 0
Ф ≠ 0, Мф = 0
Ф ≠ 0, Мф ≠ 0
Ф = 0, Мф ≠ 0
182. Звену, совершающему вращательное движение с постоянной угловой скоростью, соответствует инерционная нагрузка
Ф = 0, Мф = 0
Ф ≠ 0, Мф = 0
Ф ≠ 0, Мф ≠ 0
Ф = 0, Мф ≠ 0
183. Звену, совершающему поступательное движение, соответствует инерционная нагрузка
Ф = 0, Мф = 0
Ф ≠ 0, Мф = 0
Ф ≠ 0, Мф ≠ 0
Ф = 0, Мф ≠ 0
184. Силовой расчёт механизма начинается с …
силового расчёта начального звена
определения внешних сил, приложенных к звеньям механизма
разбивки кинематической цепи механизма на структурные группы Ассура
силового расчёта групп Ассура
185. Силовой расчёт механизмов с учётом сил инерции звеньев, выполняют …
инерционным методом
методом кинетостатики
методом уравновешивания
методом приведения сил
186. Момент (сила), условно приложенный к начальному звену и обеспечивающий заданный закон его движения, называется …
движущим
уравновешивающим
начальным
инерционным
187. Главный вектор сил инерции звена
определяется выражением (здесь m
– масса звена,
![]() - вектор ускорения центра масс звена).
- вектор ускорения центра масс звена).
188. Главный момент сил инерции звена определяется выражением (здесь Is – момент инерции звена относительно оси, проходящей через центр масс; ε – угловое ускорение звена):
Mn = Isε
Mn = - Isε
Mn = Isε2
Mn = Isε/2
189. Кинетостатически - определимой является кинематическая цепь:

 +
+

190. КПД механизма называется отношение … за цикл установившегося движения.
работы движущих сил к работе сил полезного сопротивления
работы сил полезного сопротивления к работе движущихся сил
силы полезного сопротивления к движущейся силе
191. КПД механизма характеризует … механизма
надёжность
стоимость
экономичность
быстродействие
192. КПД при последовательном соединении механизмов равен … КПД механизмов
сумме
разности
произведению
среднему
193. Угол трения это угол между
силой трения и нормальной реакцией
силой трения и полной реакцией
нормальной и полной реакциями
194. Угол трения при коэффициенте трения f = 0,18 равен
10,2°
10,31°
11,34°
11°
4.2. Уравновешивание механизмов
195. Условия статической уравновешенности механизма …
Ф∑ ≠ 0
Ф = 0
МФ∑ ≠ 0
МФ = 0
196. Условия моментной уравновешенности механизма …
Ф∑ ≠ 0
Ф = 0
МФ∑ ≠ 0
МФ = 0
197. Статического уравновешивания звеньев достигают, используя …
□ противовесы
□ пружины
□ маховики
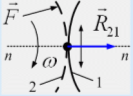
198. Неуравновешенность ротора вызывает …
□ повышение динамических нагрузок на опоры
□ неравномерность вращения главного вала
□ уменьшение угловой скорости вращения главного вала
□ увеличение угловой скорости вращения главного вала
199. Модуль главного вектора сил инерции неуравновешенного ротора рассчитывается из уравнения…
200. … возникает при совпадении частоты вынужденных колебаний механизма с частотой собственных колебаний
□ резонанс
□ диссонанс
□ вибрация
□ амортизация
201. Метод … используют для статического уравновешивания механизмов
□ замещающих масс
□ Виттенбауэра
□ приведения масс
□ рычага Жуковского
202. Сбалансированный ротор … при изменении угловой скорости начального звена
□ остается уравновешенным
□ перестает быть уравновешенным
□ меняет положение центра масс
□ расбалансируется
203. Условие статической уравновешенности механизма можно записать, как …
Ф∑ ≠ 0
Ф = 0
МФ∑ = 0
МФ∑ ≠ 0
204. Формула, используемая для расчета дисбаланса неуравновешенного ротора, имеет вид
D = m·e2
D = m/e2
D = 2m·e
D = m·e
205. Правильный порядок метода заменяющих масс, используемого для статического уравновешивания механизмов:
Размещение общей массы механизма в подвижных точках (2)
Вводятся противовесы (3)
Каждое звено механизма заменяется двумя сосредоточенными массами (1)
Объединение противовесов с заменяющими массами звеньев (4)
206. Центр масс статически уравновешенного ротора находится …
в центре ротора
на оси вращения ротора
на внешней поверхности ротора
на торце ротора
207. Условие динамической (полной) уравновешенности механизма …
Pn ≠0; Mn = 0
Pn = 0; Mn ≠ 0
Pn = 0; Mn = 0
Pn ≠0; Mn ≠ 0
208. Центр масс системы подвижных звеньев при статической уравновешенности механизма должен быть …
приложен к начальному звену
неподвижен
уравновешен
подвижен
209. Главный вектор сил инерции звена массой m = 10 кг, вращающегося с угловой скоростью ω = 100 рад/с, с центром масс отстоящим от оси вращения на r = 1 мм равен по модулю …
100 000 Н
1 000 Н
100 Н
1 Н
Вибрации в машинах


№1,2,4

№2
№1

№2,3,4
№3

№2,4,5
№1
 №2
№2

№3
№1

5. Исследование движения механизма
5.1. Динамический анализ машинного агрегата
210. Раздел ТММ, изучающий закономерности движения звеньев механизма под действием приложенных к ним сил называется _____.
а) динамикой;
б) статикой;
в) кинематикой;
г) кинетостатикой
211. Определение силового управляющего воздействия, обеспечивающего заданный закон движения, называется _____ задачей динамики.
а) обратной;
б) прямой;
в) главной;
г) силовой
212. Интеграл скалярного произведения вектора силы и вектора элементарного приращения перемещения точки её приложения, называется …
работой силы
мощностью силы
кинетической энергией
потенциальной энергией
214. Последовательность режимов движения машины
- торможение (3)
- установившееся движение (2)
- разгон (1)
215. Промежуток времени от момента начала движения ведущего звена до момента конца его движения
а) разгон
б) полное время движения
в) торможение
г) цикл движения
216. Звенья, составляющие динамическую модель механизма или машины.
а) ведомое
б) ведущее
в) выходное
г) промежуточное
д) стойка
218. Методы составления динамической модели механизма:
а) кинематический
б) кинетостатический
в) кинематический
г) статический
д) структурный
е) энергетический
219. Уравнение для определения кинетической энергии звена, совершающего вращательное движение, имеет вид …
220. Уравнение для определения кинетической энергии звена, совершающего поступательное движение, имеет вид …
221. Соответствие видов движения звеньев формулам для определения кинетической энергии:
Поступательное (1) |
|
Вращательное (2) |
|
Сложное (3) |
|
 (2)
(2) (3)
(3) (1)
(1)
222. Соответствие основных понятий динамики их определениям
Мощность (1) |
производная работы во времени (1) |
|
способность машины совершать работу |
Работа (2) |
интеграл скалярного произведения вектора силы и вектора элементарного приращения перемещения точки её приложения (2) |
223. Выражение, определяющее приращение кинетической энергии:
а)
![]()
б)
![]()
в)
![]()
г)
![]()
224. Соответствие режимов движения машины соотношению работы движущих сил и работы сил сопротивления:
Торможение (3) |
|
Разгон (1) |
|
установившееся движение (2) |
|
225. Условный момент, которым обладает звено приведения относительно оси вращения, называется … момент
а) элементарный
б) обобщённый
в) суммарный
г) приведённый
228. Формула для определения приведенного
момента сил

а)

б)
![]()
в)

г)
![]()
229. Равномерность движения механизма оценивается коэффициентом …
□ неравномерности
□ динамичности
□ равномерности
□ движения
230. Колебания значений угловой скорости ведущего звена являются причиной возникновения вынужденных _____ звеньев.
а) колебаний
б) движений
в) перемещений
г) сил
231. Маховик в механизмах…
□ уменьшает амплитуду периодических колебаний скорости начального звена
□ увеличивает амплитуду периодических колебаний скорости начального звена
□ уменьшает вибрацию при работе механизма
□ изменяет направление вращение начального звена
Синтез рычажных механизмов

№2
№1
№4
№4
№5
№4
№4
6. Роботы и манипуляторы.
238. … называют техническое устройство, предназначенное для воспроизведения рабочих функций рук человека
механизмом
манипулятором
передачей
239. Промышленными роботами называют … с автоматическим управлением и изменяемой программой, используемые в производстве.
механизмы
манипуляторы
передачи
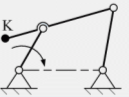
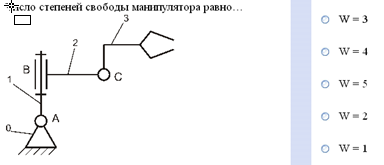
240. Число степеней свободы манипулятора равно …
1
2
3
4
5
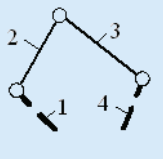
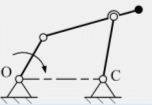
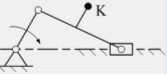
241. Число степеней свободы манипулятора равно …

1
2
3
4
5

№3
№1
№5