

2.4.1 Розрахунок діаграм навантажень. Попередній вибір електродвигуна
Визначимо статичні моменти при підйомі і спуску вантажу
![]() Н∙м
Н∙м
![]() Н∙м
Н∙м
де g - прискорення вільного падіння;
mгр, mзп - маса вантажу і захватного пристосування;
Rб - радіус барабана лебідки;
iр - передатне число редуктора;
iп - передатне число поліспасту;
– ККД передачі.
Визначимо час циклу
![]() ,
,
Де tпод - час підйому;
tсп - час спуску;
tп - час паузи;
tр - час роботи.
![]() ,
,
де h - висота підйому;
v - швидкість підйому.
Визначимо тривалість включення
![]()
![]() с.
с.
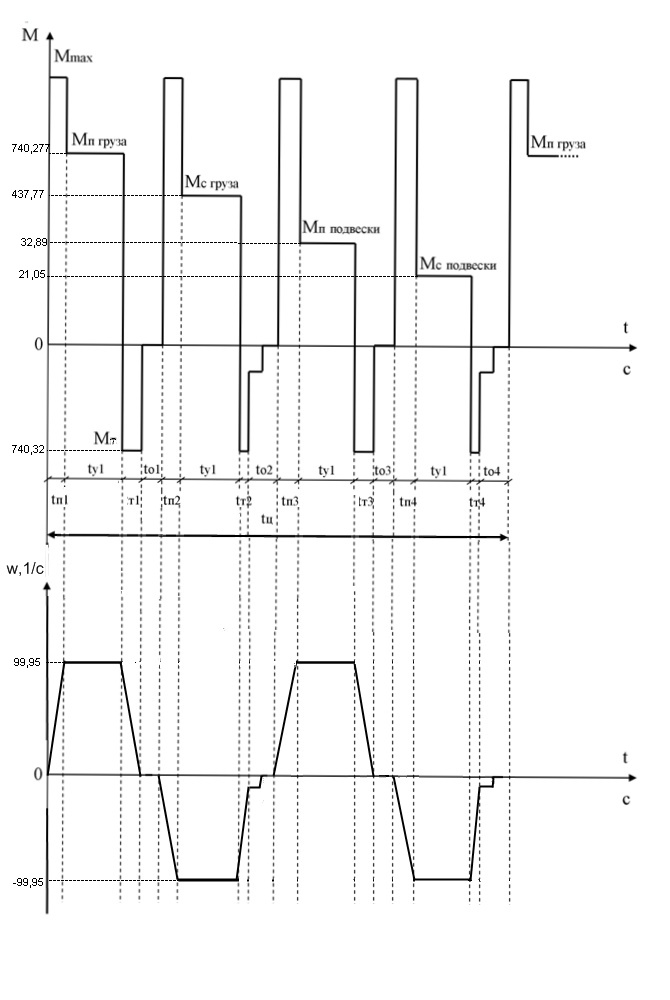
Побудуємо діаграму навантаження виробничого механізму (рисунок 2.11).
 Рисунок
2.11 - діаграма Навантаження виробничого
механізму
Рисунок
2.11 - діаграма Навантаження виробничого
механізму
Вважаючи, що двигун вибирається з режиму S3, визначимо еквівалентний момент за цикл роботи :
 Н∙м.
Н∙м.
Визначимо кутову швидкість двигуна
![]() с-
1.
с-
1.
Визначимо номінальну потужність двигуна
![]() кВт
кВт
де kз=1,3 - коефіцієнт, що враховує відмінність діаграми навантаження механізму від діаграми навантаження двигуна.
Умови вибору двигуна : Рн
Вибираємо асинхронний двигун з короткозамкнутим ротором серії SIEMENS 1LG4253-6AA
з
наступними даними:
![]() кВт,
кВт,
![]() У,
У,
![]() А,
А,
![]() про/мін,
про/мін,
![]() ,
,
![]() кг∙м2.
кг∙м2.
Т. до. у нас не виконується умова (н ( (расч,ми вибираємо редуктор з іншими параметрами, компенсуючими цей недолік.
Розрахуємо в скільки разів швидкість вибраного двигуна перевищує швидкість базового варіанту
![]() .
.
У стільки ж разів передатне число нового редуктора має бути більше, ніж передатне число
![]() .
.
З каталогу вибираємо новий редуктор, відповідно до розрахованих параметрів: РК 500-70-22М1.
2.4.2 Перевірочний розрахунок електродвигуна по нагріву і перевантажувальній здатності
Побудуємо діаграму навантаження двигуна. Перевіримо двигун за умовами нагріву і допустимого перевантаження.
Визначимо сумарний момент інерції
![]() кг∙м2
кг∙м2
де Jмех - момент інерції механізму, приведений до валу двигуна.
 кг∙м2.
кг∙м2.
Т.к. ми підібрали новий редуктор, то необхідно наново розрахувати моменти опорів при підйомі і спуску
Визначимо статичні моменти при підйомі і спуску вантажу :
![]() Н∙м,
Н∙м,
![]() Н∙м,
Н∙м,
де g - прискорення вільного падіння;
mгр, mзп - маса вантажу і захватного пристосування;
Rб - радіус барабана лебідки;
iр - передатне число редуктора;
iп - передатне число поліспасту;
– ККД передачі.
Визначимо динамічний момент
![]() Н∙м
Н∙м
де Мном - номінальний момент двигуна.
![]() Н∙м.
Н∙м.
Визначимо гальмівний момент
![]() Н∙м
Н∙м
де
![]() - для важкого режиму роботи.
- для важкого режиму роботи.
Визначимо кутове прискорення
![]() с-
2.
с-
2.
Визначимо час роботи приводу з прискоренням
![]() с.
с.
Визначимо висоту, на яку піднятий вантаж за час прискорення :
![]() м.
м.
Визначимо відстань, яка проходить вантаж без прискорення :
![]() м.
м.
Визначимо час роботи приводу без прискорення:
![]() с.
с.
Визначимо час циклу з урахуванням прискорення
![]() с.
с.
Діаграма навантаження двигуна представлена на малюнку 16.
По діаграмі навантаження знаходимо нове значення еквівалентного моменту

Н∙м
![]() кВт
кВт
![]() ,
,
Мmax ( 2,5 ∙Мн =2,5 ∙356,75 = 891,5 Н∙м.
Вибраний двигун задовольняє умовам нагріву і допустимого навантаження.
Технічні характеристики електродвигуна : трифазний асинхронний двигун з короткозамкнутим ротором, з висотою осі обертання 315 мм, призначений для комплектації приводів веж, козлових, портальних, бруківок і інших кранів у будівництві, на транспорті, в металургії і інших галузях. Тільки для частотно-регульованого приводу. Стандартна міра захисту : IP54. Розташування коробки виведень : згори; ліворуч або справа.
Номінальна напруга живлення 380/660 В.
Номінальна частота мережі 50 Гц, 60 Гц.
Двигун має систему вентиляції IC416 - незалежна вентиляція від прибудованого вентилятора. Двигун розрахований на перевантаження 1,5 номінального струму впродовж 2 хвилин відповідно до ГОСТ 28173. Клас нагрівостійкості ізоляції - F.
Умови експлуатації
– висота над рівнем моря не більше 1000 м;
– номінальна навколишня температура 40 С.
Такі двигуни мають наступні переваги:
– економію електроенергії завдяки високому коефіцієнту корисної дії;
– повну адаптацію до роботи в системі двигун - перетворювач частоти, забезпечуючи високі параметри регулювання;
– підвищений термін експлуатації, надійність і термічну стійкість завдяки застосуванню ізоляції класу нагрівостійкості F;
– понижені акустичні показники.
Паспортні дані вибраного електродвигуна приведені в таблиці 10.
Таблиця 2.8 – Паспортні дані двигуна SIEMENS 1LG4253-6AA
PН, кВт |
nН про/мін |
CosφН |
λ |
Статор |
Ротор |
KR |
Jд, кг* м2 |
|||||||
IН, А |
Iх.х, А |
R1, Ом |
X1, Ом |
σ1 |
I2Н, А |
R2, Ом |
X2, Ом |
U2ф В
|
||||||
37 |
955 |
0,81 |
3,0 |
80 |
57,8 |
0,032 |
0,071 |
1,06 |
146 |
0,043 |
0,11 |
181 |
2,5 |
0,75 |
Таблиця 2.9 – Настановний приєднувальні розміри асинхронного електродвигуна крану серії SIEMENS 1LG4253-6AA
-
d1, мм
L1, мм
L10, мм
L31, мм
d10, мм
b10, мм
h, мм
Вал
90
170
368
190
24
457
280
Конус
Габаритне креслення двигуна SIEMENS 1LG42536AA представлен на
рисунку 2.13
Настановно-приєднувальні розміри вказані в таблиці 2.9
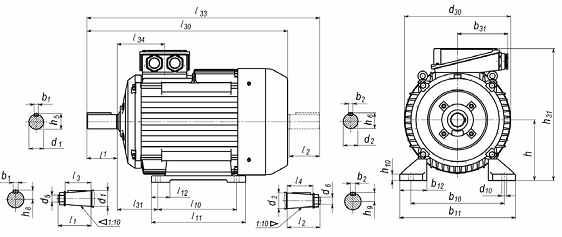
Рисунок 2.13 – Габаритне креслення двигуна SIEMENS 1LG4253-6AA
2.5 Розрахунок і вибір комплектного електроприводу і системи управління
2.5.1 Критерій вибору
Системи електроприводу крану СКЭП з перетворювачами частоти змінного струму призначені для управління механізмами підйому і пересування кранів. Система реалізована на основі сучасних частотно-регульованих перетворювачів змінного струму і високонадійного контроллера і забезпечує:
– контроль і регулювання швидкості, прискорення, моментів незалежно від маси вантажу;
– плавний розгін і гальмування механізму підйому;
– діапазон регулювання швидкості 100: 1;
– помилку при підтримці швидкості від 1 до 2%;
– автоматичний захист від перевищення гранично допустимої ваги вантажу;
– захист двигунів(максимально-струмову, із затримкою за часом);
– кероване гальмування;
– поліпшення умов роботи оператора;
– скорочення кількості релейно-контакторной апаратури, повышаю-щее надійність роботи електроустаткування.
СКЭП має модульну структуру. До складу модулів підйому СКЭП входять перетворювачі частоти, які розроблені для застосування в системах з підвищеними вимогами до точності регулювання швидкості і положення, а також до динамічних характеристик. Вони мають можливість забезпечити :
– п'ять режимів регулювання(векторне або скалярне в розімкненій системі регулювання, векторне - в замкнутій системі із зворотним зв'язком за швидкістю за допомогою энкодера, серворежим, рекуперація);
– управління положенням.
2.5.2 Перетворювач SIMOVERT MASTERDRIVE
Серія перетворювачів SIMOVERT MASTERDRIVE Vector Control складається з модульних високоефективних компонентів. Комбінуючи ці компоненти можна досягти найбільшої ефективності. Шафового виконання поставляється із стандартної міри захисту IР20. Шафові перетворювачі частоти поставляються з шафами, розрахованими для підключення до одному або декількох двигунів.
Стандартне програмне забезпечення SIMOVERT MASTERDRIVE Vector Control містить в собі два принципово способу управління, які дозволяють задовольнити будь-яким вимогам електроприводу.
Перетворювач можна підключати до живлячої мережі 3 АС від 200 В до 690 В з частотою живлення 50/60 Гц. У базовий комплект входять:
– шафа;
– головний вимикач із запобіжниками для захисту
кабелів напівпровідникових приладів;
– мережевий комутаційний дросель 2 %;
– перетворювач або блок випрямлення з інвертором;
– панель управління PMU на дверях шафи.
Опції для розширення базової версії включають механічні і електричні компоненти.
Приймаємо до установки перетворювача 6SE7031-0EE60:
Номінальний початковий струм Iнв = 37 А; базовий струм навантаження Iб = 84 А; струм перевантаження Imax = 126 А; номінальний струм DC ланки 110 А; споживаний струм(лише для перетворювача) 101 А; втрати при 2,5 кГц 1,18 кВт; потрібна витрата повітря, яке охолоджує 0,10 м3/с.
2.5.3 Вибір блоку живлення для контролера і панелі оператора
Блоки живлення PS 307 призначених для формування вихідної напруги 24 В, необхідного, для живлення центральних процесорів і цілого ряду модулів контролера SIMATIC S7 - 300. Блоки живлення PS 307 використовують для своєї роботи вхідну напругу 120/230 В. Усі блоки живлення можуть використовуватися як для живлення внутрішніх ланцюгів контролера, так і для живлення його вхідних і вихідних ланцюгів. Вибираємо стабілізований блок живлення PS 307-1BA00-0AA0.
2.5.4 Вибір автотрансформатора
Автотрансформатор, який погоджує, забезпечує наступні переваги: максимальний момент двигуна на повній швидкості при рекуперації. При переході з рухового режиму в режим рекуперації, затримка часу складає 15 мс.
Для блоків випрямлення/рекуперації потрібне підвищення напруги відносно напруги живлення на 20% для зворотного моста під час рекуперації енергії. Цей автотрансформатор призначений для такого підвищення напруги.
Вибираємо SIMOVERT MASTERDRIVES трифазний автотрансформатор фірми Siemens з параметрами Рн = 95 кВА, fн = 50 Гц, міра захисту Ир00.
2.5.5 Мережевий комутаційний дросель
Мережевий комутаційний дросель зменшує гармоніки споживаного струму перетворювачів. Мережевий комутаційний дросель також обмежує будь-які викиди струму, який викликає ті, що просіли живлячої напруги. Ефективність дроселя залежить від відношення потужності короткого замикання системи до номінальної потужності.
Вибираємо комутаційний дросель 4EP4000-2US з номінальним струмом Iн = 100 А.
2.5.6 Вибір допоміжних реле
Були вибрані допоміжні реле, DC 24 У фірми Siemens. Вони повністю влаштовують систему. Рекомендований номер: 3RH1131-1BB40.
2.5.7 Вибір програмованого контролера
SIMATIC S7 - 300 - це модульний програмуючий контролер для вирішення завдань автоматизації низької і середньої міри складності. Володіє широким спектром модулів для максимальної адаптації до вимог вирішуваного завдання, зручною конструкцією і роботою з природним охолодженням. Конструкція контролера відрізняється високою гнучкістю і зручністю обслуговування.
S7 - 300 застосовується для автоматизації машин спеціального призначення, машинобудівного устаткування, устаткування, для виробництва технічних засобів управління і електротехнічного устаткування, в системах автоматизації суднових установок і систем водопостачання.
Програмовані контролери можуть включати до свого складу:
модуль центрального процесора(CPU);
сигнальні модулі(SM), призначені для введення і виведення дискретних і аналогових сигналів;
комунікаційні процесори(CP) для організації обміну даними через Industrial Ethernet, PROFIBUS, As - interface і PTP, інтерфейс;
функціональні модулі(FM) - інтелектуальні модулі для вирішення завдання швидкісного рахунку, позиціонування, автоматичної регуляції;
блоки живлення(PS) для живлення контролера від мережі змінного або постійного струму.
Вибираємо контроллер з процесором CPU315 - 2DP з номером 6ES7315 2AG10-0AB0, оскільки CPU 315-2 DP здатний виконувати програми середнього і великого об'єму і оснащений вбудованим інтерфейсом PROFIBUS DP.
Рекомендований номер: 6ES7315-2AG10-0AB0.
Для схеми потрібні 16 цифрових входів і 8 цифрових виходів, аналогових входів, і 4 аналогових виходів. Вибираємо: цифрові модулі введенню SM 321, DI 1624 VDC(16 входів; потенційна розв'язка групами по 16; номінальна вхідна напруга 24 В), замовлений номер
6ЕS7321- 7BH01-ОАВО. Аналогові модулі введення SM 331 AI 8RTD(8 входів в 4 групах каналів), Рекомендований номер: 6ЕS7331-7РF00-ОАВО. Цифрові модулі виведення SM 322; O 824 VDC/2 А, рекомендований номер: 6ЕS7322-7BF01 - ОАAО. Аналогові модулі виведення SM 332 AО 416 біт(4 виходів в 4 групах каналів), рекомендований номер
6ЕS7332- 7ND01-ОАВО.
2.5.8. Вибір панелі оператора
Для управління процесом вибираємо панель оператора SIMATIC ОР 170В із замовленим номером 6AV6542-0BB15-2AX0. Ця панель дозволяє використати буквено-цифрову клавіатуру, інтерфейс PROFIBUS - DP. Панель оснащена мембранною клавіатурою.
2.5.9 Вибір блоку живлення
Був вибраний блок живлення SITOP MODULAR(1AC/2AC,120/230-500 VDC, 5 A), фірми Siemens. Він повністю підходить для системи, оскільки від нього живляться панель оператора і контролер, в яких напруга живлення складає 24 В. Рекомендований номер: 6ЕР1333-3ВАОО.
2.5.10 Мережеві запобіжники
Запобіжники 3NE1 серія SITOR забезпечують захист одним запобіжником, як кабелів, так і напівпровідникових елементів, це значно зменшує вартість і час їх установки. Вибираємо запобіжник 3NE1 021-0 з номінальним струмом Iн = 100 А.
2.5.11 Вибір головного контактора
Контактори застосовують як комутаційні апарати. Був вибраний контактор фірми Siemens. Параметри головного контактора : Ин = 100 А, Uн = 380 В, Рн = 50 кВт. Рекомендований номер: 3TF6844-0CM7 - ZA02.
2.5.12 Вибір автоматичного вимикача
Автоматичні вимикачі служать для відключення електричних ланцюгів при аварійних режимах роботи : коротких замиканнях, перевантаженнях, зниженні напруги.
Основними параметрами автоматичних вимикачів є: номінальна напруга, номінальний струм, час відключення.
Оскільки номінальний струм не перевищує 10 А, а номінальна напруга складає 380 В, вибираємо автоматичний вимикач фірми Siemens. Рекомендований номер: 5SX2210-7.
 2.5.13
Вибір з'єднувачів для підключення до
PROFIBUS
2.5.13
Вибір з'єднувачів для підключення до
PROFIBUS
Були вибрані SIMATIC DP, з'єднувачі для підключення до PROFIBUS фірми Siemens, до 12 Мбіт/с, з похилим відгілком кабелю, зі вбудованим термінальним резистором, і як вони найбільш сучасніші, надійніші і легші у використанні з'єднувачі. Рекомендований номер: 6ES7972-0BA41-0XA0.
2.6 Статичні характеристики електроприводу
Визначимо номінальну кутову швидкість двигуна
![]() с-
1.
с-
1.
Визначимо критичний момент
![]() .
.
Визначимо пусковий момент
![]() .
.
Знайдемо номінальне ковзання
![]() .
.
Визначимо критичне ковзання
![]() .
.
Визначимо коефіцієнти:
![]()
![]()
Будуємо механічну характеристику асинхронного двигуна по уточненій формулі Клосса(дивися рисунок 2.4).
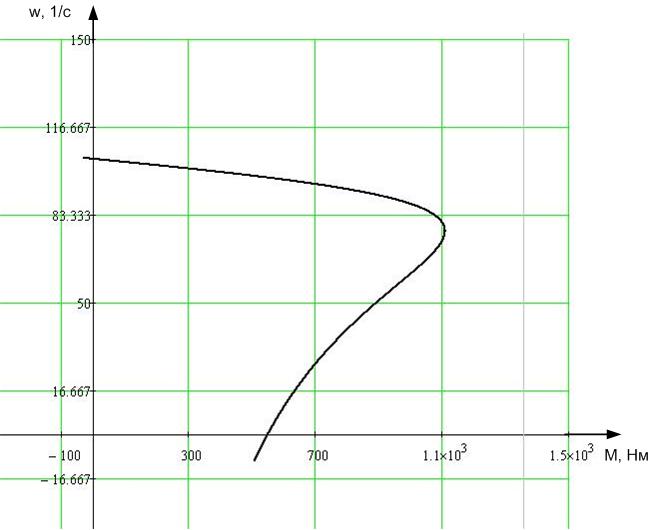
Рисунок 2.4 - Механічна характеристика асинхронного двигунаSIEMENS 1LG4253-6AA
3 Моделювання і дослідження позиційної системи електроприводу
3.1Системи регуляції положення робочого органу механізму повинні забезпечувати точне відтворення вхідного сигналу, який управляє. Функціональна схема представлена на рисунку 3.1
Функціональна схема включає:
– перетворювач частоти ПЧ;
– електродвигун змінного струму АД;
– регулятор положення РП;
– регулятор швидкості РШ;
– регулятор моменту РМ;
– датчик моменту ДМ;
– датчик швидкості ДШ;
– датчик положення ДП;
– робочий орган РО;
– тахогенератор BR.
-

Рисунок 3.1 - Функціональна схема системи регуляції положення
Структурна схема представлена на рисунку 3.2
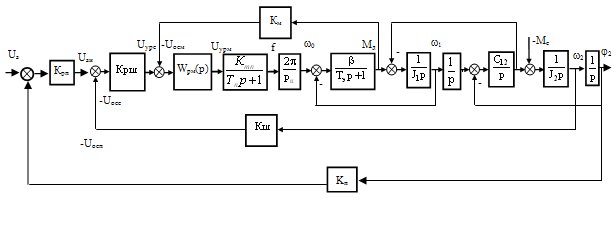
Рисунок 3.2 – Структурна схема системи електроприводу змінного струму регуляції положення
У цій структурній схемі прийняті наступні позначення
Wрм(р) - передатна функція пропорційно інтегрального регулятора моменту,
Uз - напруга завдання,
w 0 - швидкість двигуна,
w - кутова швидкість механізму,
Мд - момент розвивається на валу двигуна,
Мс - момент опору на валу двигуна,
Крс - коефіцієнт регулятора швидкості,
Кс коефіцієнт зворотного зв'язку за швидкістю,
Крп - коефіцієнт регулятора положення,
Кп - коефіцієнт зворотного зв'язку по положенню,
Км - коефіцієнт зворотного зв'язку по моменту,
Ктп - коефіцієнт передачі перетворювача,
J1 - момент інерції двигуна,
J2 - момент інерції механізму,
C - жорсткість механічної характеристики двигуна,
рп - число пар полюсів,
С12 - приведений коефіцієнт жорсткості,
Те - електромагнітна постійна часу,
Тп - постійна часу перетворювача,
Тм1 - механічна постійна часу електричної підсистеми.
Розрахунок основних параметрів схеми системи управління.
Початкові дані
![]() =2,5
– параметр
механічної частини приводу,
=2,5
– параметр
механічної частини приводу,
Рн=37 кВт - номінальна потужність двигуна,
η=87% - ККД,
соsφ=0,81,
Iрн=80 А - струм двигуна,
Sн=0,045 - номінальне ковзання,
Sк=0,26 - критичне ковзання,
Мк/Мн=3,0 - перевантажувальна здатність,
R1=0,032 Ом - активний опір статора,
X1=0,071 Ом - реактивний опір статора,
R2=0,043 Ом - активний опір ротора,
Х2=0,11 Ом - реактивний опір ротора,
Jд=0,75 кгм2 – момент інерції двигуна,
n0=1000 про/мін - частота обертання двигуна,
J2=1,125
кгм2
![]() -
момент інерції,
-
момент інерції,
С12=1774,73 - приведений коефіцієнт жорсткості,
р=3 - число пар полюсів.
Визначення коефіцієнтів зворотних зв'язків по моменту, швидкості і положенню.
Визначення коефіцієнтів зворотних зв'язків по моменту(розрахунок вироблений в програмі Mathcad)
![]()
![]() c
-
1,
c
-
1,
![]() c
-
1,
c
-
1,
![]() Нм
Нм
![]() У/Нм.
У/Нм.
Визначення коефіцієнтів зворотних зв'язків за швидкістю
![]() Вс.
Вс.
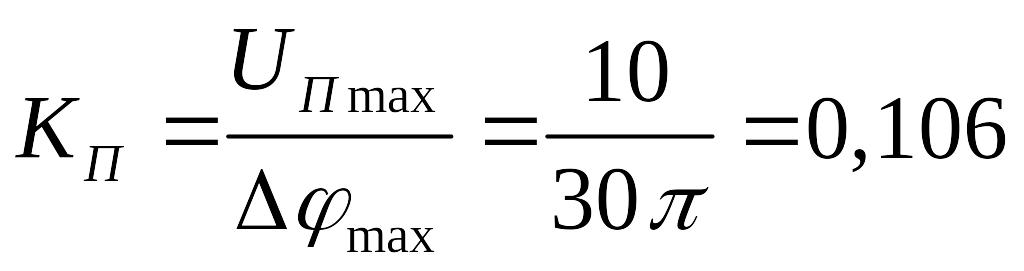
Визначення коефіцієнтів зворотних зв'язків по положенню
![]() .
.
Електромагнітна постійна часу
![]() .
.
Визначимо електромеханічну постійну двигуна
![]() з
з
![]()
![]() ,
,
![]()
![]() ,
,
де
![]() - момент інерції двигуна.
- момент інерції двигуна.
Визначення приведеного коефіцієнта жорсткості
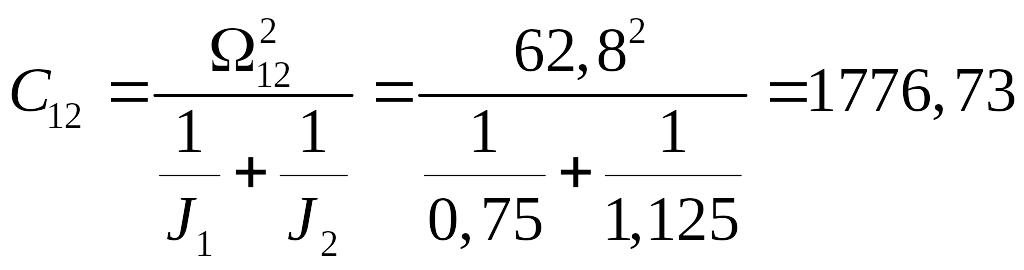 .
.
Визначення параметрів регуляторів.
Компенсуємо постійну часу ланцюга ротора підбором передатної функції регулятора моменту, зворотної передатної функції об'єкту регуляції :
![]() ,
,
де
![]() - постійна часу інтеграції розімкненого
контура моменту.
- постійна часу інтеграції розімкненого
контура моменту.
![]() ;
;
![]() Нм;
Нм;
![]()
![]()
Регулятор швидкості
![]() ,
,
![]()
Регулятор положення
![]() ,
,
![]() ,
,
 ,
,
![]() .
.
Моделювання електроприводу в середовищі MATLAB Simulink. Дослідження динамічних процесів що протікають в ЕМС зробимо в пакеті застосовних програм MATLAB Simulink представлено на малюнку 21.
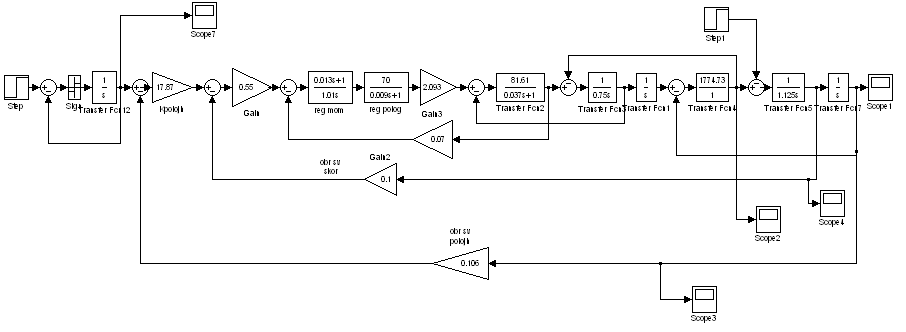
Рисунок 3.3 – Математична модель системи позиціонування в середовищі MATLAB Simulink
Побудуємо графіку перехідних процесів за розрахунковими даними, і зображуватимемо на малюнках 3.4, 3.5, 3.6, 3.7
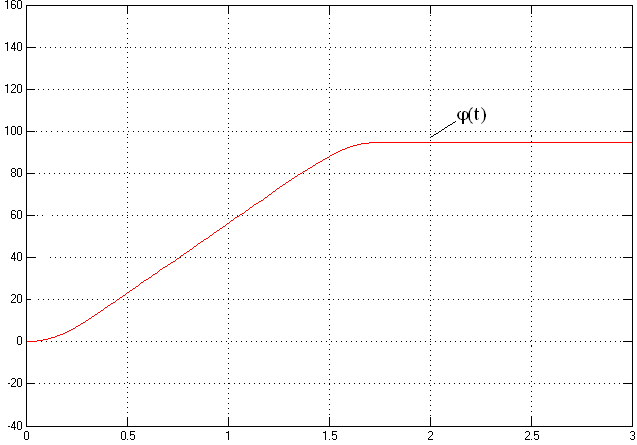
Рисунок 3.4 – Графік перехідних процесів кута φ (t)
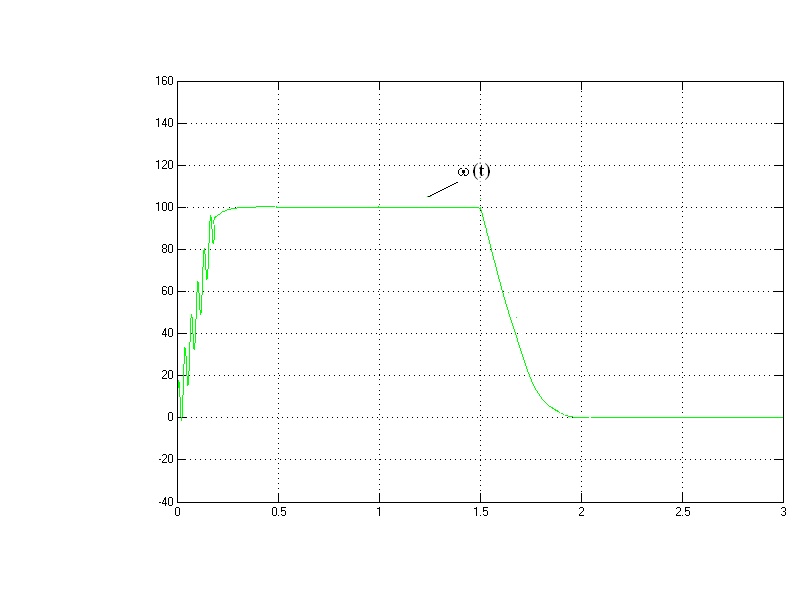
Рисунок 3.5 – Графік перехідних процесів кутової швидкості ω (t)
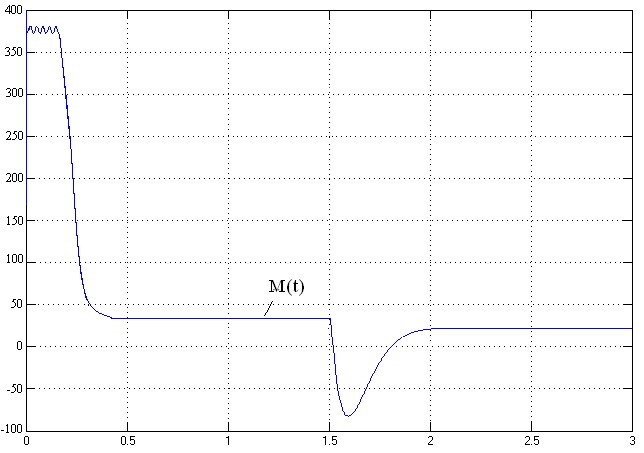
Рисунок 3.6 – Графік перехідних процесів моменту
статичного Мс(t)
|
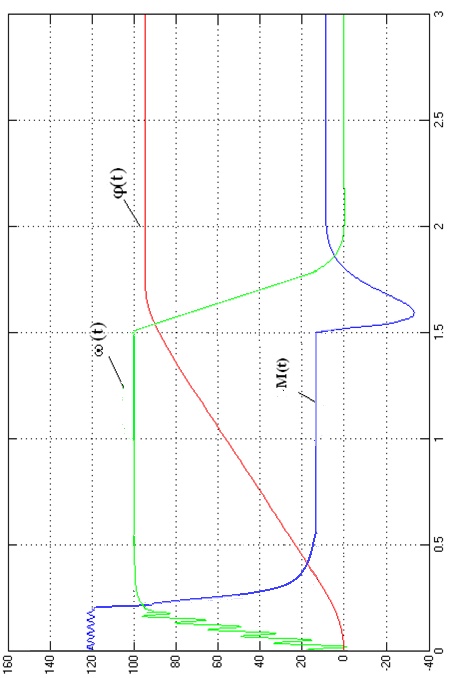
Рисунок 3.7 – Перехідні процеси в середовищі MATLAB Simulink
|
Показники якості регуляції системи позиціонування приведені в таблиці 3.1
Таблиця 3.1 Показники якості системи позиціонування
Показники |
Значення |
Статична помилка регуляції швидкості% |
1,2 % |
Статична помилка регуляції положення% |
0 % |
Перерегулювання |
0 |
Час перехідного процесу, tp, с. |
0,3 |