Авиационные приборы измeрения / Собраный 2 Гриша
.docНАЦИОНАЛЬНИЙ АВИАЦОННИЙ УНИВЕРСИТЕТ
КАФЕДРА КОМП’ЮТЕРНО-ИНТЕГРИРОВАНИХ КОМПЛЕКСОВ
КУРСОВОЙ ПРОЕКТ
по дисциплине “Технологические измерения и прибори”
Тема: Датчик положения регулирующего клапана
Выполнил: студент групи ФСУ-308
Г.О. Геращенко
Руководитель: О.В. Ермолаева
Киев 2005
|
ЗАДАЧА Спроектировать датчик момента электрического гайковерта с винтовой пружиной и электрическим регулированием допустимого момента, который удовлетворяет таким требованиям:
Внешние условия работы датчика:
РЕФЕРАТ
Объяснительная записка к курсовому проекту " Датчик момента гайковерта". Объект исследования - Датчик момента гайковерта с диапазоном углов (20... …100)0 с погрешностью ± 0,20. Цель работы - разработка датчика момента гайковерта с винтовой пружиной и электрическим регулированием допустимого момента, пригодного для применения в системах автоматического управления технологическим процессом, с расчетом и конструированием. Разработанная структурная схема датчика, обосновано выбранные : дискретный ввыходной преобразователь - АЦП, нормирующее устройство, преобразователь угла поворота детали в линейное перемещение, потом в изменение сопротивления, рассчитанный дистанционный резистивный манометр, разработана конструкция датчика положения регулирующего клапана, который удовлетворяет требованиям ТЗ; оценена возможная погрешность датчика, значение которой не превышает допустимое. Результаты курсового проектирования рекомендуется использовать при автоматизации технологического процесса .
Порядок выполнения курсовой работы: 1.Структурная схема 2.Описание каждого элемента структурной схемы -зубчатая передача -резистивный преобразователь -мостовая схема -нормирующее устройство -аналогово-цифровой преобразователь 3. Расчет резистивного преобразователя 4.Расчет массы плоской детали резистивного преобразователя 5.Приложение -Чертеж зубчатого колеса -Чертеж резистивного преобразователя
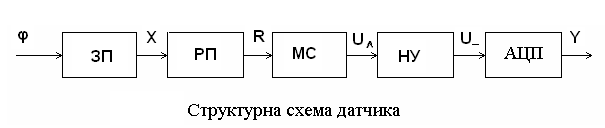
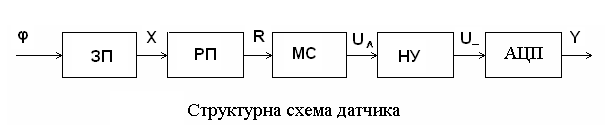
Структурная схема датчика
Х – линейное перемещение R – сопротивление U - напряжение Y – выходной сигнал ЗП – зубчатая передача РП – резистивный преобразователь МС – мостовая схема НУ – нормирующее устройство АЦП – анолого-цифровой преобразователь
Зубчатые передачи. Для увеличения- уменьшения угла поворота, преобразования угловой скорости одного значения в большее или меньшее, в датчиках применяют зубчатые передачи. Зубчатые передачи могут использоваться для уменьшения угла поворота - редуктор, или увеличения- мультипликаторы. Такие передачи могут состоять с одной или несколько пар цилиндрических зубчатых колёс, с зубчатого колеса и зубчатой рейки. Меньшую из двух в паре называют трибкою, а большую – зубчатым колесом. Если зубчатое колесо имеет ограниченный угол поворота ,то его замещают зубчатым сектором. В тех случаях, когда надо обеспечить линейное перемещение на выходе зубчатой пары, то вместо зубчатого колеса применяют зубчатую рейку. В измерительных зубчатых преобразователях коэффициент передачи обычно не может быть больше 15. Маленькое зубчатое колесо в приборах называют трибкою. Вона обычно имеет не меньше 7 зубьев. Для уменьшения износу зубьев желательно выбирать значение из чисел, что не делятся на целое число. Недостаток- наличие зазоров в зацеплениях. Для устранения этого недостатка большое колесо пары делают «разрезным», что состоит из двух шестерен, одна из которых неподвижно крепится к оси, а вторая, под действием пружинной связи может поворачиваться вокруг своей оси. Недостатком этого есть сложная конструкция. Используют также зубчатые передачи с некруглыми колёсами, тогда выходная величина функционально зависит от входной. Функция зависит от формы колес. Используют также рейковые зубчатые передачи, в которых вместо большого зубчатого колеса используют зубчатую рейку. Достоинства - возможность преобразования перемещения в угол и наоборот. Главным достоинством всех зубчатых передач есть стабильность коэффициента передач.
Классификация зубчатых передач: По размещению осей валов зубчатые передачи бывают: - С параллельными осями, выполняются с цилиндрическими колёсами с внешними и внутренними зацеплениями; - С осями, которые пересекаются (коничные): - С осями, которые перекрещиваются (червячные).
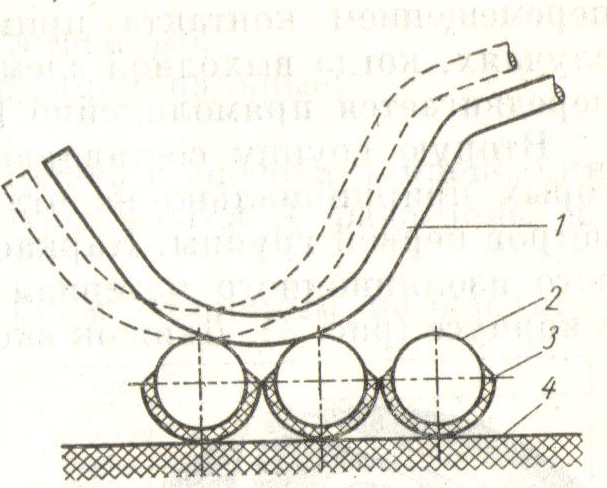
Зубчатые преобразователи измерительных приборов обычно применятся при малой механичной нагрузке и малых угловых скоростях, они должны обеспечивать плавность работы та быструю работу спряженных зубчатых пар. Недостатком обычных зубчатых преобразователей есть наличие зазору (люфт) Между зубьями зацепленных спряженных зубчатых колёс. Это не допустимо в зубчатых измерительных преобразователях потому, что приводят до увеличения вариации преобразователей, особенно в тех преобразователях, которые могут работать в реверсном режиме. Зацепление без люфта зубчатых колёс достигается регулированием междуосевых расстояний, подбором зубчатых пар и применением специальных люфтовыбирающихся колёс. Люфтовыбирающиеся зубчатые колёса могут иметь разную конструкцию, но наиболее распространённым есть колесо представленное на рис. 8.
Люфтовыбирающиеся зубчатое колесо состоит из двух колёс 1 и 2 с одинаковыми зубчатыми венцами. Колесо 1 изготавливают вместе с ступицей, которая крепится на валу. Второе колесо налаживают на маточину первого и соединяют колёса между собой с помощью винтов, которые поворот колёс относительно друг друга. При соединении с другим спряженным зубчатым колесом шестерни люфтовыбиращегося колеса смещают на несколько шагов и растягивают пружину 3. После соединения под действием пружин колеса люфтовыбирающегося колеса прижимаются к разным сторонам зубьев спряженного колеса и образуют с ним безлюфтовое зацепление. Момент, что образует пружины, должен превышать момент, который передается зубчатой парой. Если зубчатый измерительный преобразователь состоит из нескольких пар зубчатых колёс, тогда в каждой паре должно быть Люфтовыбирающееся колесо. При выборе зубчатого преобразователя нужно определить его назначение, тоесть какую физическую величину, в которую он должен преобразовать, и каким должно быть передаточное отношение – отношение значения выходной величины к входной. Для обеспечения быстрой работы спряженных зубчатых пар и возможность считать периодическую погрешность выбирать таким, чтобы отношение числа зубьев большого колеса и трибки отвечало целому числу из ряда і =1;2;3;4;5;10;15. После этого выбирают модуль и число зубьев трибки и колеса, которые нормируются ГОСТ 13733-68. При этом нужно помнить, что люфтовыбирающееся колесо диаметром меньше чем 20 мм сложно сделать, а для увеличения точности преобразователя число зубьев трибка должно быть больше 25. Модуль m и число зубьев z преобразователя можно выбирать исходя из отношений в табл. Когда выберем m и z,рассчитываем другие параметры преобразователя с эвольвентным зацеплением, формулы для расчётов пар с прямозубой рейкой – в табл. 2. (Линейные размеры в мм)
Таблица 2
После окончания расчётов параметров зубчатого преобразователя определяют допустимую погрешность. Погрешность зубчатого измерительного преобразователя зависит от качества изготовления зубчатых колёс. Для зубчатых преобразователей с параллельными осями и из металлических механично обработанными прямозубыми колёсами с эвольвентнными зацеплением, стандартами есть семь степеней точности(4;5;6;7;8;9;10-ый) и такие нормы: - кинематической точности, которые регламентируют погрешность передаточного отношения, и определяют точность выходных параметров преобразователя; - плавность работы, что регламентируют циклические погрешности, которые повторяются за оборот колеса; - контакту зубьев, что определяют полноту лежания поверхностей зубьев колёс; - боковых зазоров при отсутствии люфтовыбирающихся колёс; При выборе степени точности зубчатых преобразователей необходимо конструктивное назначение та условий эксплуатации. Для зубчатых преобразователей, которые состоят из n валов та 2 (n-1) зубчатых колёс, кинематическая погрешность может быть рассчитана по формуле:
Если кинематическая погрешность преобразователя превышает допустимое значение, то подстраивают параметры преобразователя. Если же кинематическая погрешность не превышает допустимое значение, тогда преобразователь считается посчитанным. После завершения расчётов параметров зубчатых преобразователей переходят к конструкции. При этом нужно придерживаться конфигураций та размеров колёс, установленных ГОСТ 13733-68. Зависимость ширины винца зубчатого колеса от модуля.
Резистивный преобразователь К резистивным измерительным преобразователям относятся преобразователи, которые преобразуют входную величину в электрическое сопротивление, которое применяется в электрической цепи. Наиболее часто их применяют в виде самостоятельного конструктивно законченного элемента- резистора, который состоит из изоляционного каркаса, на который наносят чувствительный элемент – дрот или плёнку. Резистивные преобразователи бывают с постоянным или переменным сопротивлением. Резистивные преобразователи с постоянным сопротивлением применяются для преобразования электрических величин: »ток-напряжение» и наоборот, делитель тока.
Достоинства
резистивного преобразователя состоят
в том, что они имеют простую конструкцию,
достаточную точность, линейную или
функциональную статическую
характеристику преобразования, могут
создаваться с нужным значением
выходного сопротивления (от частиц
Ом до 10 Недостатки: они имеют значительную температурную и долгосрочную нестабильность, и движущий контакт при преобразовании перемещения.
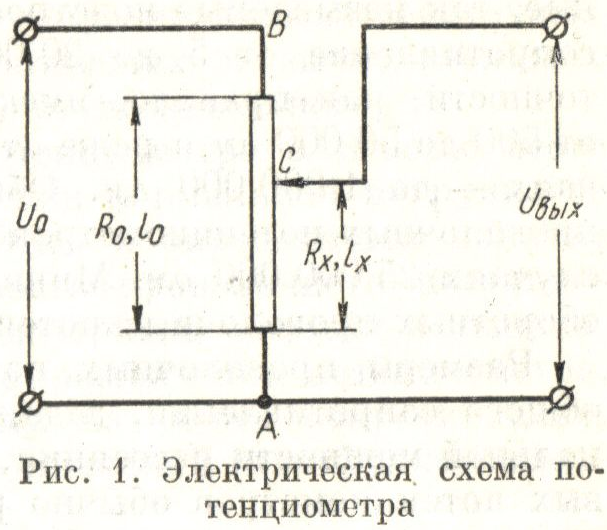
Потенциометр предназначен для плавного или скачкообразного изменения электрического напряжения и определяется как регулируемый делитель напряжения, построенный из активных сопротивлений (проволочных, плёночных, жидкостных и др. ). Конструктивно простейший потенциометр представляет собой электрический проводник ( резистивный элемент ) с достаточно большим омическим сопротивлением , по которому скользит подвижный контакт , включающий в электрическую цепь любую часть заданного напряжения.
Потенциометры характеризируются следующими параметрами: величиной омического сопротивления резистивного сопротивления резистивного элемента; геометрическими размерами; законом изменения сопротивления и линейностью характеристики ; допуском на общее сопротивление, стабильностью сопротивления и режима работы; сопротивлением изоляции обмотки относительно корпуса ; максимальной рабочей мощностью рассеяния ; величиной рабочего вращающегося момента ; сроком службы при заданных условиях, а также необходимой скоростью вращения оси и рабочим режимом в различных условиях эксплуатации. Общее сопротивление. Общее омическое сопротивление наиболее распространённых проволочных потенциометров зависит от их габаритных размеров, марки и диаметра проволоки. Неточные, так называемые, подстроечные потенциометры обычно имеют сопротивление от 5 до 20 000 Ом, потенциометры повышенной точности как правило ,имеют общее сопротивление в пределах от 500 до 50 000 Ом . Общее сопротивление многогабаритных проволочных потенциометров достигает 500 000 Ом , а некоторых случаях 25 000 000 Ом. Минимальное общее сопротивление однооборотных проволочных потенциометров составляет 1 Ом. Закон изменения сопротивления. При перемещении токосъемного движка по резистивному элементу потенциометра в зависимости от его конструкции функциональная зависимость изменяется по какому-либо заданному закону : линейному , логарифмическому , и т. д., т .е потенциометр , как «отрабатывает « заданную функцию . Чаще всего в схемах автоматики и вычислительных устройствах применяют потенциометры с линейной зависимостью или линейные Линейность. В идеальном случае линейный потенциометр должен обладать постоянной величиной изменения выходного напряжения при равных угловых перемещениях движка. В действительности этого никогда не происходит , т. е равные по величине перемещения движка вызывают неодинаковые приращения выходного напряжения . Поэтому под линейностью иногда понимается величина отклонения выходного напряжения или сопротивления для любой точки обмотки от прямой графика « сопротивления – угловое перемещение движка «. Допуск на общее сопротивление. Потенциометры различного назначения изготовляют с определённой точностью по общему омическому сопротивлению . Для потенциометров широкого применения эта точность составляют 5-10 % от номинального значения сопротивления , а для потенциометров повышенной точности 0,1- 1 % .Допустимое отклонение общего сопротивления высокоточных прецизионных потенциометров , работающих в вычислительных схемах ,не должно превышать 0,1 % от номинального. Стабильность. Сопротивление потенциометра в течении всего срока службы и режим его работы при нормальной нагрузке не должно существенно меняться . Допуск на стабильность проволочного потенциометра зависит от материала обмотки и движка , от условий эксплуатации , а также от назначения потенциометра .Обычно этот допуск равен допуску на общее сопротивление, в отдельных случаях – на точность линейной характеристики. Сопротивление изоляции обмотки относительно корпуса. При комнатной температуре (+25 ˚ С) и относительной влажности 30 – 80 % сопротивление изоляции обмотки относительно корпуса должно быть не менее 100 Мом. Мощность рассеяния. Максимальная рабочая мощность рассеяния зависит от допустимого нагрева обмотки потенциометра в условиях эксплуатации при повышенной температуре окружающей среды мощность рассеяния потенциометра может достигать номинальной величины . номинальная мощность рассеяния потенциометра лежит в пределах от 0,1 до 10 Вт, а отдельных случаях составляет 15 – 20 Вт. Рабочий вращающийся момент. Рабочий вращающийся момент это усилие, которое требуется для начала перемещения движка из любой произвольной точки на контактной дорожке потенциометра. Вращающийся момент небольших проволочных потенциометров общего применения колеблется от 50 до 360 г см. Скорость вращения. Износ, а следовательно и срок службы потенциометра зависят от скорости вращения оси движка и его контактного давления на обмотку , поэтому последнее должно быть как можно меньшим . Потенциометр безотказно работает только при скоростях вращения , не превышающих 100-150 об/мин. При более высоких скоростях из –за ударов токосъемного элемента движка о витки проволоки контакт частично или полностью нарушается . Это явление можно устранить ,увеличив контактное давление и повысив частоту поверхности контактной дорожки. Срок службы. Срок службы потенциометра зависит от свойств материалов резистивного элемента и токосъемного элемента движка, контактного давления, условий эксплуатации срок службы потенциометров широкого применения при постоянной нагрузке – от 10 тыс. до нескольких миллионов циклов.
Терминология, которая относится к проволочным однооборотным потенциометрам. Потенциометр (проволочный)- ступенчатый делитель напряжения, выходное напряжение которого связано с положением токосъемного движка определённой математической зависимостью. Входное напряжение- напряжение, подаваемое на потенциометр. Выходное напряжение - снимаемое с потенциометра. Коэффициент деления – отношение выходного напряжения к входному. Погрешность потенциометра - разность между расчётной величиной коэффициента деления и его действительной величиной. Относительная погрешность- погрешность, отнесённая к входному напряжению или общему сопротивлению и выраженная в процентах. Шаговый угол- угол поворота оси потенциометра, соответствующий шагу витков обмотки. Чувствительность - минимальное изменение коэффициента деления, которое можно получить на данном потенциометре. Номинальное сопротивление - расчётная величина сопротивления в Омах. Общее сопротивление- сопротивление, измеренное относительно всей рабочей длины обмотки. Контактное давление- давление, создаваемое движком на обмотке сопротивления , измеренное в граммах. Момент трогания - момент, который необходимо приложить к оси потенциометра для того, чтобы она начала вращаться. Момент вращения - момент, который необходимо приложить к оси потенциометра для его вращения без остановки.
Виды потенциометров. Основные параметры.
Современные потенциометры разделяются на три класса: - лабораторные высокоточные потенциометры, которые представляют собой крупногабаритные заключённые в корпус устройства, используемые для низковольтных весьма точных измерений на постоянном токе в цепях с низким сопротивлением; - обычные радиотехнические потенциометры – малогабаритные дешёвые устройства сравнительно не высокой точности, которыми пользуются для регулирования громкости; - высокоточные малогабаритные потенциометры, широко применяемые в приборостроении, автоматике и вычислительной технике.
Проволочные потенциометры
Проволочные потенциометры, имеющие наибольшее распространение, делятся на однооборотные и многооборотные. Однооборотные потенциометры. Однооборотный проволочный потенциометр как устройство представляет собой резистивный элемент из проволоки малого диаметра с высоким омическим сопротивлением, намотанной в один ряд на изолированный каркас. При перемещении движка по обмотке потенциометра (рис.1) его изогнутый конец касается следующего витка проволоки прежде, чем сходит с предыдущего, поэтому в момент перехода с витка на виток контакт не нарушается. Существуют два способа компоновки конструкции потенциометров. Потенциометры, применяемые в радиотехнической аппаратуре и вычислительной технике, представляют собой отдельный прибор с большим количеством деталей (чаще всего с компенсирующими элементами), заключенный в кожух вместе с контактной Группой. Потенциометры, используемые в гироскопических навигационных и других приборах и автоматах, как правило, состоят из двух основных конструктивных элементов: резистивного элемента (каркаса с обмоткой) и подвижного контакта (движка). Резистивный элемент таких потенциометров в большинстве случаев закрепляют в корпусе или оправе, бандаже, скобе. В изделиях с потенциометрами последней группы резистивный элемент и движок монтируют в разных блоках и стыкуют лишь при общей сборке самого изделия.
рис. 1.схема перемещения движка по обмотке потенциометра.
рис. 2.схема потенциометра с прямолинейным перемещением движка.
Общими элементами в обеих группах потенциометров являются резистивный элемент и движок. Именно от них зависят надежность, точность воспроизведения функции и вся работа потенциометра. Потенциометры разделяют в зависимости от конструкции каркаса на кольцевые, дуговые, пластинчатые и стержневые. Каркас может иметь круглую, прямоугольную, овальную, эллиптическую и другие формы поперечного сечения. (Рис. 2). Потенциометры каждого из указанных видов могут быть одинарными, двойными и тройными. Одинарные потенциометры применяются особенно широко — они составляют более 80 % всех выпускаемых проволочных потенциометров, примерно 10% приходится на двойные потенциометры, а остальное - на строенные и счетверенные. По способу перемещения движка потенциометры делятся на потенциометры с прямолинейным перемещением движка, кольцевые с ограниченно-круговым перемещением, кольцевые и плоские с неограниченно-круговым перемещением движка. К первой группе относятся потенциометры, резистивный элемент которых представляет собой обмотку на каркасе с прямоугольным сечением. Движок такого потенциометра перемещается по ребру каркаса с обмоткой, зачищенной от эмали (рис. 2).
Вторую группу составляют потенциометры, конструкция которых принципиально не отличается от конструкции потенциометров первой группы. Каркас прямоугольного сечения из листового изоляционного материала изогнут в кольцо и смонтирован в корпусе (рис. А). Движок скользит по верхнему ребру резистивного элемента от упора до упора на определенный угол (обычно это угол 330°)
К третьей группе относятся потенциометры, резистивный элемент которых представляет собой каркас кольцевой формы с обмоткой. Каркасы таких потенциометров изготавливают из пластмасс или алюминиевых сплавов (последние покрывают изоляционным лаком). Движок может перемещаться на любой угол. Четвертую группу составляют потенциометры, выходное напряжение которых изменяется по синусоиде или другой тригонометрической функции. Такие потенциометры наматываются на каркас из плоского листа изоляционного материала, изоляцию на проволоке обмотки зачищают по окружности в месте касания токосъемного элемента. В результате анализа обширного литературного материала в 1958 г. автором была предложена классификация однооборотных проволочных потенциометров, принятая ведущими конструкторами и изготовителями этих изделий и положившая начало созданию нормализованных материалов для этих элементов. По этой классификации потенциометры делятся на два класса : Класс А — потенциометры, выполненные как отдельные приборы; класс Б — потенциометры, конструктивно оформленные в виде двух раздельных элементом (резистивного элемента и подвижного контакта), стыкуемых при общей сборке изделия. Потенциометры класса А в свою очередь, подразделяются на два подкласса: I подкласс А — кольцевые высокоточные; // подкласс А - кольцевые подстроенные. Потенциометры класса Б делятся на пять подклассов: I подкласс Б — кольцевые; II подкласс Б — дуговые; /// подкласс Б — пластинчатые линейные; IV подкласс Б — пластинчатые функциональные; V — подкласс Б — стержневые.
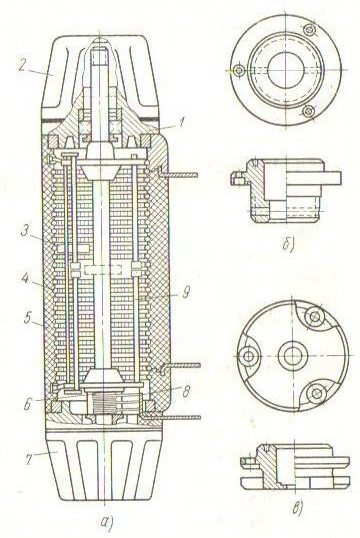
Многооборотные потенциометры. За последние годы в связи с повышением требований к потенциометрам, особенно к их надежности, были созданы многооборотные потенциометры, которые характеризуются большой разрешающей способностью. Корпусом (основой) у таких потенциометров служит медный провод диаметром 1—2 мм, свитый в залитую компаундом спираль с 3,5; 10; 15; 20; 25 или 40 витками. В отличие от однооборотных потенциометров намотку ведут голой (неизолированной) проволокой. Требуемый закон изменения сопротивления обеспечивается благодаря переменному шагу обмотки. Конструктивное исполнение большинства многооборотных потенциометров не имеет принципиальных отличий, за исключением оформления крышки (рис 4. а)
рис .4 . многооборотный потенциометр.
В качестве примера можно привести конструкцию 20-оборотного потенциометра типа ГШМЛ-М (потенциометр прецизионный модернизированный линейный). Конструкция крышки таких потенциометров бывает двух типов (рис. 9, б, в), что определяет способ крепления потенциометра в аппаратуре. Намотка резистивного элемента потенциометра (см. рис 9, а) выполняется на 20-витковой спирали 4 диаметров 1 мм, армируемой в эпоксидном корпусе 5. Необходимые функциональные зависимости получают, изменяя шаг намотки, диаметр и материал проволоки. Токосъемный элемент выполнен в виде ролика 3, перемещающегося по спирали намотки вдоль токосъемной оси 9. На ролике установлена пружина, обеспечивающая надежный контакт между роликом и осью. С подвижной части напряжение снимается контактной втулкой 6 и тремя парами щеток 8. Все токосъемные элементы выполнены из сплавов на основе благородных металлов, что предотвращает коррозию, уменьшает переходное сопротивление, понижает уровень шумов и увеличивает срок службы. Выводы таких потенциометров выполняются из сплава нейзильбер. За пределами рабочего угла намотки имеется так называемая технологическая намотка на дуге примерно 36 с каждой стороны.
Индукционные потенциометры Индукционные потенциометры применяются для преобразования угла поворота ротора в амплитуду выходного напряжения с высокой точностью при рабочем диапазоне отклонения ротора ± (60 - 120)°, а иногда и больше [7]. Потенциометры этого типа по выполняемым функциям сходны с проволочными, применяемыми в вычислительных устройствах. Методика анализа погрешностей от нагрузки аналогична в некоторых случаях для обоих типов потенциометров. Конструкции линейных индукционных потенциометров, выполненных на базе электромашинной системы, появились более десяти лет назад . Такие потенциометры имеют по одной диаметральной секции на статоре и роторе и максимальный теоретический диапазон линейности в режиме холостого хода (±90°). Однако практически удается получить линейность в узком диапазоне порядка ± 60°. При нагрузке индукционного потенциометра так же, Как и у проволочного делителя напряжения, искажается линейность характеристики. Чтобы частично компенсировать реакцию ротора при нагрузке потенциометра, на статоре предусматривается вторая короткозамкнутая обмотка, которая находится в квадратуре с первой и компенсирует частично реакцию нагрузки по основной пространственной гармонике потока. К достоинствам индукционных потенциометров следует отнести простоту преобразования угла поворота в амплитуду выходного напряжения с высокой точностью и широким рабочим диапазоном отклонения ротора, К числу основных недостатков, снижающих достоинство таких потенциометров, относятся, прежде всего, неоднородность поля как в спинках статора и ротора, так и в воздушном зазоре, что обусловлено магнитным сопротивлением пластин магнитопровода и наличием пазов. Следует отметить, что подобные линейные индукционные потенциометры, построенные на базе обычной электромашинной системы, не могут быть выполнены бесконтактными. На точность линейного преобразования индукционного потенциометра, влияет магнитное сопротивление стали магнитопроводов. Причем необходимо учитывать не только влияние магнитного сопротивления стали на характер преобразования в реальных системах, но и ее нелинейность и неоднородность. Анализ работы индукционных потенциометров показал, что при использовании высококачественных магнитных материалов для изготовления магнитопроводов и при высокой точности изготовления всей конструкции их погрешность в линейности составляет менее 1% в диапазоне 60—70°
Плёночные потенциометры Пленочный потенциометр предполагает бесконечную разрешающую способность, высокую точность и надежность. Он состоит из тонкой резистивной металлической или угольной пленки с выводами выходного напряжения на концах и скользящего кон- такта. Чтобы получить требуемую величину, необходима очень малая (до прозрачности) толщина металлической пленки, что лимитирует срок ее службы и надежность. Углеродные пленки могут быть намного толще, так как углерод обладает высоким удельным сопротивлением. Кроме того, они характеризуются низким уровнем шумов, автоматической смазкой и устойчивостью против коррозии. В последние годы были разработаны потенциометры с металлокерамическим резистивным элементом и с пленками на основе проводящих пластиков. Металлопленочные потенциометры. Резистивный элемент металлопленочного потенциометра (рис. 5) представляет собой тонкий слой высокоомного металла родия 1, нанесенного на стеклянную пластинку 2. Толщина слоя 2—3 мкм.
рис. 5. Металлоплёночный потенциометр. Сопротивление металлопленочного потенциометра в отличие от проволочного не носит ступенчатого характера, вследствие чего исчезает витковая погрешность, уменьшение которой в проволочных потенциометрах имеет определенные пределы, особенно при малых номинальных значениях общего сопротивления. Фактически неограниченная разрешающая способность пленочных потенциометров обеспечивает бесконечное число положений контакта на резистивном элементе. Кроме того, момент вращения металлопленочных потенциометров меньше, чем у проволочных. Общее сопротивление таких потенциометров лежит в пределах от 100 Ом до 1 Мом, погрешность характеристики не превышает 0,5 %. Металлоплёночные потенциометры применяются в приборах с потенциометрическими дистанционными передачами и следящими системами.
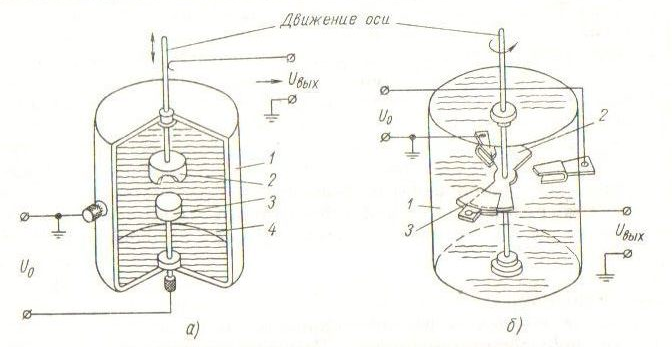
Жидкостные потенциометры. Потенциометры, в которых в качестве резистивного элемента используется жидкость, были названы жидкостными. На рис. 6 приведена схема одного из таких потенциометров, разработанного американской фирмой.
рис. 6. Схемы жидкостных потенциометров. а- с продольным перемещением оси; б- с вращательным перемещением оси; 1- заземлённый металлический екран;2- подвижный электрод; 3- неподвижный электрод; 4- жидкий диэлектрик.
Жидкостный потенциометр с линейным изменением сопротивления имеет несколько электродов с вертикальным перемещением. Общее (входное) напряжение подводится на заземленный экран и не заземленный металлический электрод. Линейную и нелинейную функции можно воспроизвести, придав определенную форму электродам и экрану. В потенциометре с вращающимся электродом общее напряжение подводится на две неподвижные лопасти, третья — подвижная лопасть служит выходным электродом. Вторым выходным электродом является вращающаяся лопасть. Таким образом, отпадает надобность в скользящих металлических контактах. Придав лопасти определенную форму, можно получить различные законы изменения сопротивления потенциометра как функции угла поворота его оси. Сопротивление жидкостных потенциометров зависит от электролита и составляет от нескольких сот Ом до нескольких мегаом.
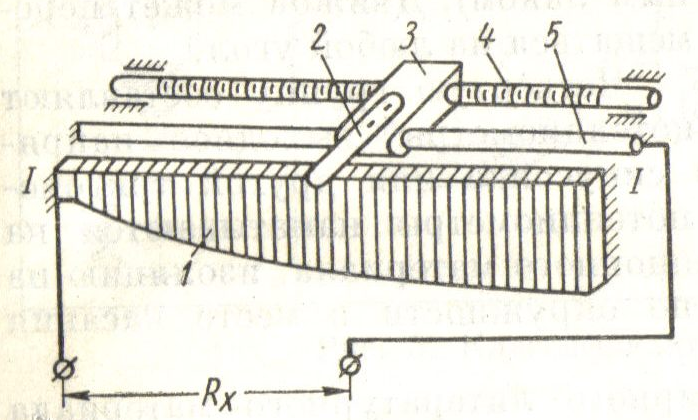
Угольноплёночные потенциометры. Чтобы лучше познакомиться с конструкцией точного потенциометра с угольной пленкой, целесообразно представить себе его резистивный элемент в виде удлиненной проволоки, которая в противоположность потенциометрам с проволочной обмоткой расположена параллельно перемещению движка. Такая конструкция в основном аналогична конструкции реохорда, существенное различие состоит лишь в том, что рабочая дорожка у потенциометра с угольной пленкой имеет прямоугольное сечение. Длина этой дорожки соответствует се толщине, увеличенной в сотни раз; в качестве материала для резистивного элемента используют очень твердый обладающий большой прочностью на истирание угольный слой, который устойчив против коррозии. Работа резистивного элемента с угольной пленкой связана с понятием «зоны потенциала» и не соответствует принципу работы проволочного сопротивления. Подводимое к концам проволочного сопротивления напряжение ограничивает прохождение тока через поперечное сечение проволоки; ширина движка, скользящего вдоль резистивного элемента, будет соответствовать толщине проволоки сопротивления. У угольнопленочных потенциометров происходит иначе: ток распределяется по всей ширине полосы дорожки, а ширина движка составляет только ее незначительную часть. Поэтому потенциометр с углеродной пленкой рассматривают как потенциометр в прямом смысле слова, а не как изменяющееся сопротивление. Элементы пленочного угольного потенциометра показаны на рис. 7 . Напряжение, подаваемое на выходные полоски 1, вызывает ток, проходящий в горизонтальном направлении (штриховые линии на рис, 7, а). Точки с равными потенциалами располагаются при этом по вертикалям (рис. 7, б). Эквипотенциальные линии не могут пересечься друг с другом, поскольку одни и те же точки не могут находиться под двумя различными потенциалами. Таким образом, устанавливаются нежелательные «срывы» выходного напряжения. Если токосъемные элементы перемещаются по всем трем контактным направляющим (линии А, В и С), то все они снимают один и тот же потенциал, если находятся на одинаковом расстоянии от концевой полоски. Эквипотенциальные линии перпендикулярны направлению перемещения токосъемных контактов. Следовательно, контакты могут иметь одинаковое напряжение, несмотря на то, что находятся на различных линиях перемещения. Если эти движки расположены правильно относительно пленочного элемента и если они соединены с перемещающим механизмом «уступами», то каждый токосъемный контакт будет отличаться от другого по длине.
рис. 7. Элементы угольного пленочного потенциометра.
Поскольку каждому движку соответствует своя резонансная частота колебаний, в условиях вибрации практически невозможно нарушение сцепления движка с угольным слоем. Неудовлетворительное функционирование одного токосъемного контакта не может вывести потенциометр из строя. Технические требования к отводам устанавливаются в зависимости от величины напряжения и механического перемещения. На рис. 7, в показан отвод 1 с «нулевой» шириной, укрепленный на активном слое потенциометра. Ширина отвода принимается равной нулю, поскольку он расположен весьма далеко от линии перемещения любого из контактов и не нарушает картины электрического поля (за исключением непосредственно прилегающих участков). Это показано на рис. 7, г, где местные возмущения эквипотенциальных линий находятся в непосредственной близости от отвода. Линия перемещения ближайшего токосъемного контакта достаточно удалена от отвода, отчего в значение линейности не вносится погрешность.
Мостовая схема. Чтобы измерение сопротивления вело за собой изменение тока и изменения положения стрелки, вводим мостовую схему.
При изменении температуры контролируемой среды меняется сопротивление датчика, вследствие чего происходит перераспределение токов в рамках логометра. Это приводит к изменению положения результирующего вектора магнитного потока, создаваемого ампервитками рамок логометра.
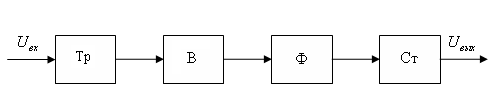
Нормирующее устройство Нормирующее устройство предназначено для формирования на выходе датчика сигнала постоянного напряжения. Изобразим структурную схему нормирующего устройства
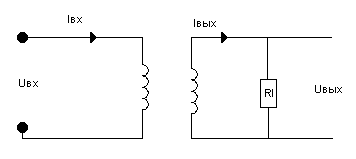
Тр – трансформатор В- выпрямитель Ф – сглаживающий фильтр Ст – стабилизатор Как правило, трансформатор применяют для изменения переменных напряжений
Напряжение
Потери мощности в трансформаторе очень малы, так что мощность в первичной обмотке равна мощности во вторичной обмотке.
Тогда из закона Ома следует
По этому
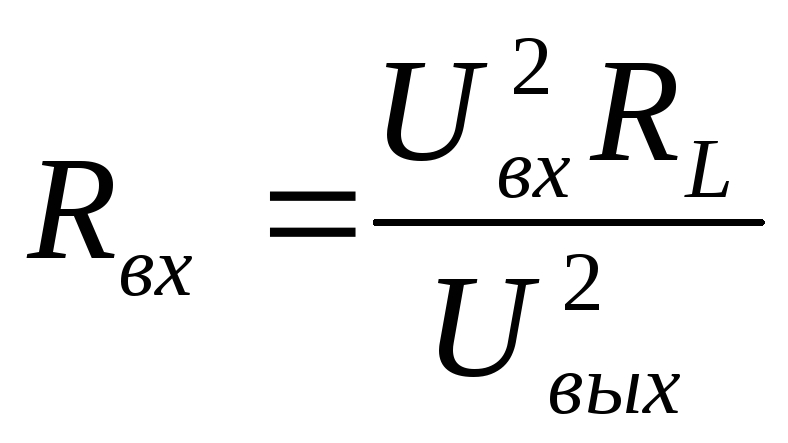
Если смотреть на Транзистор со стороны его первичной обмотки, то кажется, что он обладает некоторым входным сопротивлением
то есть
Таким образом,
мы видим что первичная обмотка
трансформатора оказывает сопротивление,
равное сопротивлению нагрузки во
вторичной обмотке, деленному на квадрат
отношения числа витков. Величину
Если источник
сигнала с сопротивлением
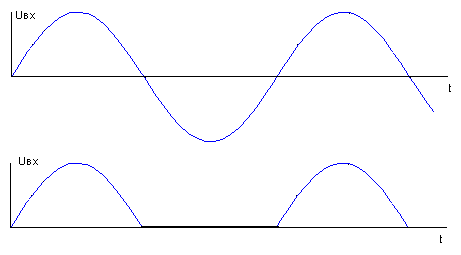
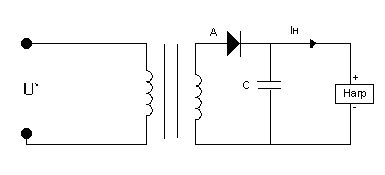
Кроме правильного отношения числа витков в трансформаторе, необходимо также, чтобы через него проходил сигнал в желаемом диапазоне частот и требуемой величины, что обеспечивается соответствующей величины индуктивности первичной обмотки и пренебрежимо малыми индуктивностями рассеяния. Выпрямитель Изобразим схему трансформатора с однопериодным выпрямителем
С помощью диода переменное напряжение выпрямляется для получения постоянного напряжения. Диод пропускает ток, только тогда когда в т.А положытельное напряжение и размыкает когда отрицательное напряжение. В результате на нагрузке появляется однополярное напряжение.
Поскольку на нагрузке могут быть только положительные полупериоды, синусоиды, однополярное напряжение состоит из серии положительных импульсов. Это преобразование называетсяы однополупериодным выпрямлением. Фильтр Форма сигналов которая приведена выше , хотя и является однополярным, но про них нельзя сказать, что они будут непрерывным постоянным напряжением потому, что содержится большая переменная составляющая. Это напряжение годится для заряда аккумулятора. Что бы сгладить постоянное напряжение, к выходу выпрямителя подключают накапливающий конденсатор С
Емкость конденсатора С для сети с частотой 50 Гц находится в диапазоне от 100 мкФ до 30000 мкФ и зависит от тока нагрузки и требует степени сглажывания. Эффект сглаживания накапливающего конденсатора можно рассчитать рассматривая интервалы заряда и разряда сигнала. Конденсатор заряжается вблизи пикового значения соответствующего полупериода переменного напряжения и затем разряжается в нагрузку в течении оставшейся части периода. Таким образом большую часть времени ток нагрузки обеспечивается накапливающим конденсатором, а выпрямитель пополняет заряд конденсатора в близи пиков в каждом полупериоде. Если ток нагрузки равен 0, то конденсатор будет просто оставаться заряженным. Стабилизатор В стабилитронах для искусственного получения малых напряжений пробоя применяется высокая сепень легирования. Пробой стабилитрона в нашем случае наступает при напряжении 5 В. В режиме пробоя разность потенциалов на диоде остается почти постоянной при изменении тока в широком диапазоне. Это свойство используется в простейшей схеме стабилизации напряжения.
В этой схеме выходное напряжение равно разности потенциалов на диоде 4 поэтому при изменении входного напряжения в широких пределах оно постоянно. Заметим, что входное напряжении должно быть по крайней мере на 2 или 3 В выше, чем требуемое выходное напряжение, чтобы задать соответствующий ток через стабилитрон, при котором обеспечивается его работа в режиме пробоя.
Аналого-цифровой преобразователь
АЦП служит для
преобразования аналогового электрического
сигнала в цифровой код, пропорциональный
значению аналогового сигнала. Для
построения АЦП используют устройства
последовательного или параллельного
развертывания АЦП имеют генераторы
пилообразного напряжения и устройство
сравнения входного сигнала со значением
пилообразного напряжения. Каждому
пилообразному напряжению соответствует
аналогово – цифровой код. В случае
преобразования аналоговых величин в
цифровые применяют две операции,
являющиеся основными при построении
АЦП : квантование и кодирование.
Квантование заключается в разбиении
непрерывной величины на определенные
интервалы приращения по всему диапазону
изменения этой величины или выделения
фиксированных точек. Число уровней
квантования по приращениях
Кодирование
заключается в том, что каждому
квантованному или фиксированному
уровню непрерывной аналоговой величины
присваивается определенное число.
Для n-разрядного
кода число комбинаций
где,
Кодирование каждого уровня квантования совокупностью условных сигналов и цифровых кодов зависит от выбираемого способа измерения аналоговой величины. Точность преобразования зависит от ошибок в измерениях, составляющих (0,1:0,01)% и шагов квантования налоговых величин по уровню и времени. Точность промежуточного преобразования определяется частотой импульсов счета. Для разрабатываемого датчика возьмем микросхему типа КД572ПВ2 совместно с ИОН и несколькими резисторами и конденсаторами которая выполняет функции АЦП, работающего по принципу двукратного интегрирования с автоматической коррекцией нуля с определением полярности входного сигнала. Цифровая информация на выходе микросхемы представляется в семи сегментном коде и отображается на 4-диапазонном светодиодном цифровом табло с семисегментными индикаторами типа АЛС3246.
Расчёт линейных потенциометров. Определяем рабочую длину обмотки или рабочий угол поворота движка потенциометра (максимальное перемещение движка) в мм или в градусах:
L0
=
L0
=
t= du+0.015= 0.8 + 0.015 = 0.815 mm- шаг намотки.
Определяем число витков: n= L0/t = 122.2/0.815 = 150.
Определяем нужное перемещение щётки L2: L2= kl
Где k
= m
L2=
2
Определяем длину намотки L1:
L1 = (1.05-1.10)L2= - 10
Определяем длину и электрическое сопротивление витка: Lв = 2(H + b); Принимаем за высоту 10 мм, а ширину каркаса – 0,8 мм: Lв = 2(10 + 0,8)= 21,6 мм.
Rв
=
Определяем длину дрота намотки:
Lд.
= lв
n
= 21.6
Определяем полное сопротивление:
R0
=
Рассчитываем припускаемую мощность:
P
= R0 рассчитываем рабочее напряжение :
U
= R0 Для круглых рассчитываем угловую длину намотки:
Рассчитываем рабочую угловую длину намотки:
2.Зубчатые передачи.
Движение в зубчатых передачах передаётся с помощью пары зубчатых колёс .В нашем случае используем зубчатую передачу
Примем передаточное отношение зубчатой пары 5:
і
= Модуль выбираем по ГОСТ9563-60 и ГОСТ 13733-77. m = 0.6 Рассчитаем шаг зацепления:
t=
Выбираем радиус колёс:
Определим диаметр колёс, для этого рассчитаем количество зубьев:
z
z
d
d
Высота
головки зуба:h' Для цилиндрического колеса, радиусом 25 mm, с внутренним зацеплением рассчитаем: Диаметр окружности выступов:
D Диаметр окружности впадин:
D Межцентровое расстояние:
А= Для цилиндрического колеса, радиусом 5 mm, с внутренним зацеплением рассчитаем: Диаметр окружности выступов:
D Диаметр окружности впадин:
D Межцентровое расстояние:
А=
3.Расчет массы плоской детали.
В
качестве плоской детали возьмём
зубчатое колесо. Чтобы вычислить
массу, необходимо рассчитать объём.
Объём зубчатого колеса состоит из
объёма его зубьев и цилиндра с
основанием ( Так как объём зуба равен объему впадин то суммарный объём рассчитываем за формулою:
V Рассчитаем объём внутреннего цилиндра с учётом отверстия для оси:
V Параметры зубчатого колеса:
d
d
d b- ширина- 5 мм.
V
V Суммарный объём:
V=
V
Так
как зубчатое колесо изготовлено из
стали, плотность, которой
m
= V
Расчет погрешности датчика
Примем что погрешность каждой составляющей датчика будет одинакова, а допустимая погрешность датчика равно 0,5. Следовательно
Отсюда следует что
Используемая литература:
1.Белевцев А.Т. Потенциометры:- Оборонгиз, 1962-356 ст.
2.Авиационные приборы. Пособие по курсовому проектированию/Под редакцией Шершуна. Киев, КИИГА, 1971-168 ст.
3.ГОСТ 9178-81 /Основные нормы взаимозаменяемости. Передачи зубчатые цилиндрические мелкомодульные. Допуски.
4.ГОСТ 9563-60 Основные нормы взаимозаменяемости. Колёса зубчатые. Модули.
5.ГОСТ 13733-77 Колёса зубчатые цилиндрические мелкомодульные прямозубые и косозубые. Типы, основные параметры и допуски.
|






 .
. .
. 538.8мм
538.8мм