

Авиационные приборы измeрения / МИНИСТЕРСТВО НАУКИ И ОБРАЗОВАНИЯ УКРАИНЫ
.doc|
МИНИСТЕРСТВО НАУКИ И ОБРАЗОВАНИЯ УКРАИНЫ НАЦИОНАЛЬНЫЙ АВИАЦИОНЫЙ УНЕВЕРСИТЕТ
КУРСОВОЙ ПРОЕКТ с дисциплины «Технологические измерениям и приборам» Тема: Датчик линейного перемещения
Виконав: студент 307 групи ФСУ Жук Елена Николаевна (подпись) (Фамилия.И.О) Руководитель: Иванов Игорь Алексеевич (подпись) (Фамилия.И.О)
2006 год
Задание Спроектировать датчик линейного перемещения стола координатно свердлильного станка, удовлетворяет условия:
Требования к проекту
Внешние условия работы датчика 1.Давление воздуха от 730 до 770 мм рт.ст.
2.Температура
воздуха от 5 3.Влажность воздуха 40......90% 4.Вибрация места установки датчика: частота 20…….100Гц виброускорение не больше 0,5g 5.Напряжения питания (одна из приведенных ниже):
=(27
(36
(220
Содержание
|
ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИЙ. ОБЩИЕ СВЕДЕНИЯ Измерительная информация, получаемая от контролируемого объекта, передается в измерительную систему в виде сигналов каго-либо вида энергий. Можно говорить первичных сигналах, непосредственно характеризующих контролируемый процесс, о сигналах, передаваемых в измерительную схему прибора, и т.д. При передаче информации от контролируемого объекта к указателю прибора сигнала претерпевают ряд изменений по уровню и интенсивности и преобразования из одного вида энергий в другой. Не обходимо такого преобразования вызвана тем, что первичные сигналы не всегда удобны для передачи, переработки, дальнейшего преобразования и произведения. Например ,при измерении температуры приборов, чувствительный элемент которого помещается в контролируемую среду, воспринимает поток тепла трудно передать , а тем более произвести на указателе прибора. Этой особенностью обладают сигналы большинства видов неэлектрической энергий. Потому, при измерений неэлектрической величины воспринимаемые чувствительным элементом сигналы преобразуются в электрические сигналы, являющейся универсальными. Та часть прибора, в которой неэлектрической измеряемый сигнал преобразуется в электрический, называется преобразователем. Известно много электрических методов измерения неэлектрических величин. Для удобства изучения введет классификация этих методов по виду связи между электрических и неэлектрическими величинами:
2.ИНДУКТИВНЫЙ МЕТОД В электрических методах измерения, основанных на измерении индуктивности L, используется свойства катушки изменить свое реактивное ( индуктивное) сопротивление при измени некоторых ее параметров, определяющих величину индуктивности. Для получения возможно большей индуктивности катушки малых габаритов, как правило, выполняется с сердечником из ферромагнитного материала. Выражение для определения индуктивности такой катушки имеет вид:
Где
Изменение индуктивности L
согласно формуле (2.1) можно осуществлять
путем изменения числа витков
Если катушка, индуктивности которой изменяется пропорционально измеряемой неэлектрической величине, включена в электрическую цепь, то по изменению силы тока в цепи или напряжения на клеммах прибора можно судить об этой величине. Перейдем к изложению различных методов измерения медленно изменяющихся величин для их питания можно обойтись переменным током промышленной частоты. При измерений индуктивными преобразователями величин, изменяющихся с высокой частотой, необходимо выполнить два условия: во-первых, частота тока, питающего преобразователь, должна быть I несколько раз выше частоты изменения измеряемой величины, во-вторых, собственная частота элементов (обычно якорей или мембран), служащих для преобразования измеряемой неэлектрической величины в изменение индуктивности, должны быть значительно выше наивысшей частоты измеряемой неэлектрической величины в изменение индуктивности, должны быть значительно выше наивысшей частоты измеряемой величины.
Принципиальная схема индуктивного
преобразователя очень проста (рис.1).на
железном сердечнике 1 намотана катушка
2. Если изменять воздушный зазор
Рис.1.Схема индуктивного датчика:
1-сердечника; 2-катушка;
L-коэффициент
самоиндукции;
Для преобразования изменения индуктивности датчика в изменение силы тока, напряжения или частоты имеется ряд схем, которые можно разделить на резонансные, нерезонансные недифференциальные и дифференциальные.
Простейший пример резонансной
схемы приведен на рис.2. В этой схеме
емкость С постоянна, а индуктивность
L катушки
изменяется за счет изменения воздушного
зазора
Рис. 2. Резонансное схема включения индуктивного датчика
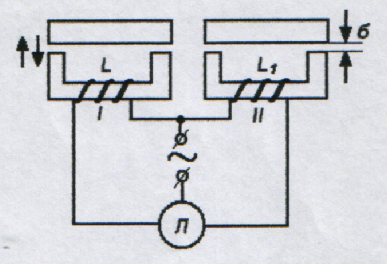
Рис.3 Нерезонансная недифференциальная схема включения индуктивного датчика с логометра
|
|
Если питающие напряжение и стабилизировано по амплитуде и частоте, то резонансные схемы, обладающие большой чувствительностью, обеспечивать также достаточность измерения. Примеры
нерезонансних недифференцированных
схем приведены на рис .1;3 и 4. В схеме
на рис..3 воздушный зазор
катушки I,а
следовательно, и сила тока в ней
изменяются, а в катушке IIостаются
неизменными. Логометр Л. Включенный
в схему прибора в качестве указателя,
будет измерять отношение токов в
катушке I
и II.
Очевидно, показание логометра будет
являться функцией величины зазора
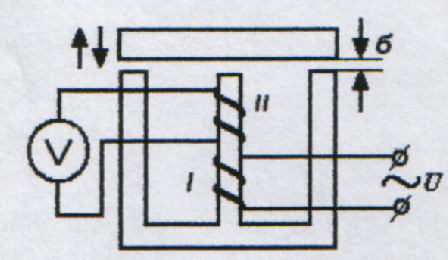
Рис. 4. Трансформаторная схема включения индуктивного датчика
В
трансформаторной схеме(рис.4) изменение
зазора
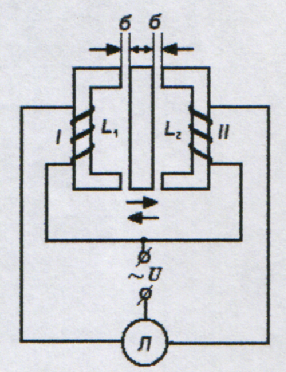
Рис.5. Дифференциальное схема включения индуктивного датчика с логометром
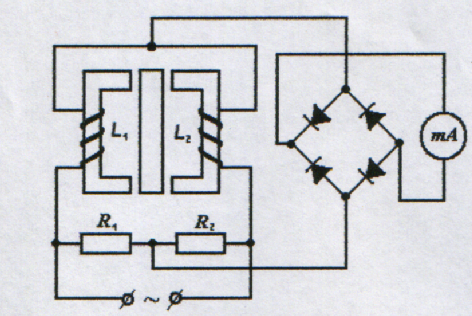
Рис.6. Дифференциальное мостовая схема включения индуктивного датчика
На рис.6. приведена схема моста с двумя взаимно изменяющимися плечами L1 и L2.Изминения индуктивностей осуществляется посредством перемещения общего сердечника из среднего положения под действием механических сил. Подобное схемы часто применяется в приборах для измерения переменных давлений, ускорения и деформаций. Рассмотрим основные элементы расчета индуктивных датчиков. Исходными данными для расчета является тим датчика, вид и размера магнитной системы и ход якоря. Определяют подлежат электрические параметры катушки ( полное и омическое сопротивления, число витков, сила тока), мощность, потребляемая датчиком, частота питающего напряжения. В качестве примера рассмотрим магнитную систему датчика, представляемого на рис. 1. Если
будет известна зависимость приращения
сопротивления
где R- сопротивления катушки постоянному току; w-круговая частота;
Комплексное
магнитное сопротивление
При
расчетах комплексного магнитного
сопротивления
4.Расчет массы плоской детали
Рассчитать площадь данной детали посредством расчета суммы площадей прямоугольников:
|
|
|


|
Рис.6. Дифференциальное мостовая схема включения индуктивного датчика
На рис.6. приведена схема моста с двумя взаимно изменяющимися плечами L1 и L2.Изминения индуктивностей осуществляется посредством перемещения общего сердечника из среднего положения под действием механических сил. Подобное схемы часто применяется в приборах для измерения переменных давлений, ускорения и деформаций. Рассмотрим основные элементы расчета индуктивных датчиков. Исходными данными для расчета является тим датчика, вид и размера магнитной системы и ход якоря. Определяют подлежат электрические параметры катушки ( полное и омическое сопротивления, число витков, сила тока), мощность, потребляемая датчиком, частота питающего напряжения. В качестве примера рассмотрим магнитную систему датчика, представляемого на рис. 1. Если
будет известна зависимость приращения
сопротивления
где R- сопротивления катушки постоянному току; w-круговая частота;
Комплексное
магнитное сопротивление
При
расчетах комплексного магнитного
сопротивления
|
|
Рис. 7. Расчетная схема магнитопровода Кроме
того, при применении магнитопровода
из сплошного куска ( а не листового)
стали начинает сказывается поверхностный
эффект. Неравномерное распределение
магнитного потока по сечению
магнитопровода, свойственное переменным
магнитным полям, крайне затрудняет
определение магнитного сопротивления
Где 1и p – длина и периметр магнитопровода w- круговая частота y- удаленная проводимость материала магнитопровода; Rm –активное составляющие магнитного сопротивления;
В
том случае, когда магнитный поток в
магнитопровода близок к равномерному,
определение комплексного магнитного
сопротивления производится по формуле:
Где P- мощность потери на гистерезисе и вихревые точки; Ф- магнитный поток S- площадь поперечного сечения магнитопровода. При выборе частоты питающего напряжения исходят из следующего соображений. Для уменьшения динамических погрешностей это частота должна быть в 8-10 раз больше частоты измеряемой величины. Поскольку реактивное сопротивления датчика пропорционально частоте, то с повышением частоты увеличивается чувствительности датчика, но одновременно возрастают потери на гистерезисе и вихревые точки и усиливается поверхностный эффект. Исходя из этих соображений, можно сказать, что имеется некоторое оптимальное значение частота питающего заряжения, лежащие в пределах 600-800 Гц При определении магнитодвижущих силы (м.д.с) катушки следует исходить из требование малой реакций электрической части датчика на его механическую часть и из малой реакций указателя на датчике( при заданной мощности указателя). Реакции электрической части датчика на его механическую часть определяется электромеханической силой притяжения якоря
или,
так проводимость воздушного промежутка
Эта
сила должна быть во много раз меньше
измеряемого усилия, действующего на
якоре, так как в противном случае
появятся большие погрешности. Из
формулы следует, что при заданном
значении Fэ
можно определить м.д.с. Для устранения
реакций указателя на датчик мощности
датчика должна быть в 10-15 раз больше
мощности указателя. Из этих соображений
при заданной мощности указателя
мощности указателя определяется
мощность
Где Е-напряжение; к- коэффициент формы; f-частота ir-сила тока Из формулы при заданной мощности можно найти м.д.с.(ампер- витки) преобразователя.
3.РАСЧЕТ ИНДУКТИВНОСТИ ДАТЧИКА Для расчета электрических параметров датчиков необходимо найти индуктивности его катушек, которые определяют через проводимости воздушных зазоров. Точное определение последних представляет большие трудности ввиду трехмерности электромагнитного поля. Для этого нужно рассчитать проводимость воздушных зазоров между якорей и краями сердечников, на которые намотаны эти катушки. Расчет произведен аналитическим методом, как наиболее подходящим в данном случае. Для этого магнитное поле в воздушном зазоре и краевое поле выпуклости разобьем на простые фигуры. Таким образом это поле состоит из:
Для расчета датчика необходимо:
Проводимости рассчитаны в семи случаях, которые соответствует пяти положениям якоря:X=0;5;10;15;20;25;мм При X=0 воздушный зазора между якорем и краем сердечника 1 равный
Находим значением зазора Связь между этими значениями и величиной перемещения якоря Х определяется по формуле:
Таким образом, значением зазора между стержнем сердечника и якорем равны:
Значения
зазора между якорем и средним стержнем
сердечника при Х=0;5;10;15;20;25; не будет
меняться, то есть будет: Проводимость воздушных зазоров, не учитывая потоки выпуклости, находим по формуле:
Где l= 8мм – длина зазора; b= 8мм – ширина сечения края сердечника;
Таким образом, проводимости равны:
Значение проводимости для зазора между якорем и средним стержнем сердечника будет:
Проводимость потоков выпуклости рассчитаем по формуле:
Таким образом, проводимости потоков выпуклости в семи положениях якоря равны:
Проводимость потока выпуклости для среднего стержня сердечника:
Проводимость Gb и G3 преобразуем в проводимости Gb3 по правилам преобразователь при последовательном соединении, при этом:
Проводимость Gb3 при разных положениях якоря относительно края сердечника равна:
Индуктивность катушек находят по формуле:
Где -
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
f = 50Гц –частота;
Индуктивность катушки для разных положений якоря равны:
По получение значениями индуктивности находим реактивные сопротивления катушек: jX=jwL
Катушка сердечника при разных положениях якоря имеет такие значения реактивных сопротивления:
Активное сопротивление обмотки датчика находят по формуле:
Где
Таким образом, активное сопротивление обмотки будет равна:
При Х=0мм
При Х=5мм
При Х=10мм
При Х=15мм
При Х=20мм
При Х=25мм
Мостовая схема Расчет допустимой погрешности имеем структурную схему датчика
Будим считать, что погрешность каждой состовляющией+ Датчика будет одинаковое, а допустимая погрешность датчика за условием задание равняется 0,01. Отсюда получаем.
Где
Где
Или считая, что
Поскольку спроектированный датчик имеет только один преобразователь, то его допустимая погрешность равна:
Таблица
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|

 См
См См
См См
См См
См См
См См
См См
См См
См См
См См
См См
См См
См См
См

 =0,01мм
=0,01мм


