

42 Использование обратных связей для повышения качества.
Обратные
связи могут быть положительными и
отрицательными. Кроме того, обратные
связи могут быть жесткими и гибкими.
Рассмотрим передаточную функцию,
записанную для случая отрицательной
обратной связи. Из этого выражения
найдем передаточную функцию для
установившегося режима, для чего
необходимо положить
 :
:
 .
.
Здесь
может быть два случая. Если выполняется
условие
 ,
что будет при использовании в цепи
обратной связи дифференцирующих
элементов, то в установившемся режиме
,
что будет при использовании в цепи
обратной связи дифференцирующих
элементов, то в установившемся режиме
 .
Это означает, что в этом режиме передаточная
функция цепи, охваченной обратной
связью, будет равна передаточной функции
исходной цепи. Такая обратная связь
называется гибкой.
Нетрудно видеть, что гибкая обратная
связь действует только в переходных
режимах, а в установившемся режиме она
как бы отключается.
.
Это означает, что в этом режиме передаточная
функция цепи, охваченной обратной
связью, будет равна передаточной функции
исходной цепи. Такая обратная связь
называется гибкой.
Нетрудно видеть, что гибкая обратная
связь действует только в переходных
режимах, а в установившемся режиме она
как бы отключается.
Если
 ,
то обратная связь действует не только
в переходном, но и в установившемся
режиме. В этом случае обратная связь
называется жесткой.
,
то обратная связь действует не только
в переходном, но и в установившемся
режиме. В этом случае обратная связь
называется жесткой.
Заметим,
что случай, когда звено, охватываемое
обратной связью, относится к числу
интегрирующих звеньев и
 не вносит особенностей. Здесь по-прежнему
условие
будет соответствовать случаю гибкой
обратной связи, так как числитель будет
стремиться к бесконечности быстрее,
чем знаменатель, и результирующая
передаточная функция
не вносит особенностей. Здесь по-прежнему
условие
будет соответствовать случаю гибкой
обратной связи, так как числитель будет
стремиться к бесконечности быстрее,
чем знаменатель, и результирующая
передаточная функция
 так же, как и передаточная функция
исходной цепи. Заметим также, что понятие
гибкой
или жесткой
обратной связи связано с той величиной,
которая принимается в качестве выходной
в исходном звене.
так же, как и передаточная функция
исходной цепи. Заметим также, что понятие
гибкой
или жесткой
обратной связи связано с той величиной,
которая принимается в качестве выходной
в исходном звене.
В динамическом отношении отрицательные обратные связи могут оказывать самое различное действие. Однако подобно тому, как это было сделано для последовательных корректирующих устройств, можно наметить три основных вида отрицательных обратных связей:
1) обратные связи, подавляющие высокие частоты (аналоги пассивного последовательного интегрирующего звена);
2) обратные связи, подавляющие низкие частоты (аналоги пассивного последовательного дифференцирующего звена).
3) обратные связи, подавляющие средние частоты (аналоги пассивного последовательного интегро-дифференцирующего звена);
Установить аналогию обратной связи с тем или иным последовательным корректирующим звеном можно при помощи формул перехода (10.5) и (10.6). Особенно важно иметь возможность перехода от последовательного корректирующего звена к эквивалентной обратной связи. Это определяется тем, что расчетным путем наиболее просто определить параметры последовательного корректирующего звена, а с точки зрения технического осуществления наиболее удобны обратные связи.
43 Понятие желаемой лачх, методика ее построения.
П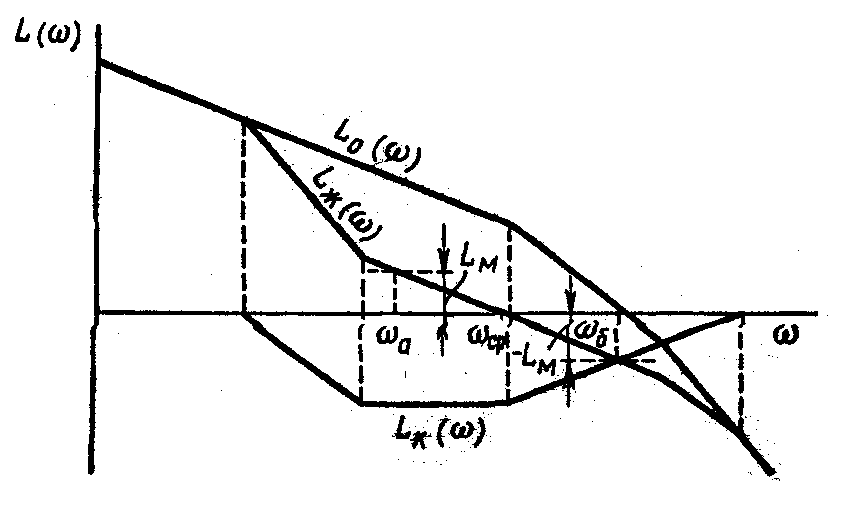 остроение
желаемой ЛАЧХ. Желаемой называют
асимптотическую ЛАЧХ Lж
(w)
разомкнутой системы, имеющей желаемые
(требуемые) статические и динамические
свойства. Желаемая ЛАЧХ состоит из трех
основных асимптот: низкочастотной,
среднечастотной и высокочастотной.
Кроме того, могут быть сопрягающие
асимптоты, которые соединяют основные.
остроение
желаемой ЛАЧХ. Желаемой называют
асимптотическую ЛАЧХ Lж
(w)
разомкнутой системы, имеющей желаемые
(требуемые) статические и динамические
свойства. Желаемая ЛАЧХ состоит из трех
основных асимптот: низкочастотной,
среднечастотной и высокочастотной.
Кроме того, могут быть сопрягающие
асимптоты, которые соединяют основные.
Строится желаемая ЛАЧХ на основании требований к системе. Ранее было выяснено, что низкочастотная асимптота ЛАЧХ разомкнутой системы определяет статические cвойства. Если передаточная функция (5.37) разомкнутой системы имеет передаточный коэффициент k и порядок астатизма v, удовлетворяющие требованиям, то низкочастотной асимптотой желаемой ЛАЧХ Lж (w) является низкочастотная асимптота ЛАЧХ L0 (w) неизменяемой части системы. На рис. 5.23 показан именно такой случаи.
Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы — устойчивость и показатели качества переходной характеристики.
Построение среднечастотной асимптоты желаемой ЛАЧХ начинают с выбора частоты среза wср. Для этого используется номограмма (рис. 5.24), составленная В. В. Солодовниковым. Она определяет зависимость перерегулирования от времени регулирования tp от максимума Ртах вещественной частотной характеристики замкнутой системы, причем время регулирования tр дано в виде функции частоты среза wср.
Номограмма используется следующим образом. По заданному значению перерегулирования о определяют значение Рmаx. Затем по Рmаx определяют соотношение между tp и wср, т. е.
![]() (5.38)
(5.38)
На
рис. 5.24 показано, как по значению
 =
30% определено Рmах
= 1,27 и затем tр
= 3,5Пи/wср.
=
30% определено Рmах
= 1,27 и затем tр
= 3,5Пи/wср.
Из (5.38) вычисляют частоту среза wср1, при которой время регулирования не превысит заданного значения. Если при начальном рассогласовании g0 ускорение регулируемой координаты ограничивается значением w, то частота среза не должна быть больше wср2, т. е.
![]() (5.39)
(5.39)
Частота среза wср2 соответствует оптимальному переходному процессу при допустимом ускорении w.
Таким образом, частота среза должна быть выбрана по одному из следующих условий:
![]() (5.40)
(5.40)
Чем больше wср, тем меньше время регулирования. Однако если wср2 < wср1, то wср не должна быть больше wср2. В этом случае требование в отношении времени регулирования, возможно, не будет удовлетворено.
Среднечастотная асимптота желаемой ЛАЧХ проводится через точку wср наклоном —20 дБ/дек. При большем наклоне трудно обеспечить необходимый запас устойчивости и допустимое перерегулирование.
Протяженность среднечастотной асимптоты устанавливается исходя из необходимого запаса устойчивости. Из этих же соображений выбирают ее сопряжение с низкочастотной асимптотой. Кроме того, сопрягающую асимптоту следует выбирать так, чтобы характеристика Lж (w) возможно меньше отличалась от L0 (w) и корректирующее устройство было возможно более простым.
Д ля
указанного выбора по ранее найденному
значению Pmax
с помощью кривых,
показанных на рис. 5.25, определяют избыток
фазы у
и
предельные значения LM
логарифмических амплитуд. Избыток фазы
v
должен быть обеспечен на том участке
характеристики Lж
(w),
для которого справедливо
ля
указанного выбора по ранее найденному
значению Pmax
с помощью кривых,
показанных на рис. 5.25, определяют избыток
фазы у
и
предельные значения LM
логарифмических амплитуд. Избыток фазы
v
должен быть обеспечен на том участке
характеристики Lж
(w),
для которого справедливо

Этот участок охватывает среднечастотную асимптоту и, возможно, часть сопрягающей асимптоты.
Сначала нужно провести прямую с ординатой LM (пунктир на рис. 5.23). Затем нанести сопрягающую асимптоту. Если наклон низкочастотной асимптоты 0 или —20 дБ/дек, то наклон сопрягающей асимптоты выбирается равным —40 или —60 дБ/дек. Начинать ее можно из точки среднечастотной асимптоты с ординатой LM. После этого проверяют избыток фазы уа при частоте wа, где ордината Lж (w) равна LM. Значение уа подсчитывается по формуле
 (5.42)
(5.42)
где v — порядок астатизма; wi — сопрягающие частоту меньше wа, при которых наклон Lж (w) увеличивается на 20 дБ/дек; k — число сопрягающих частот wi; wj — сопрягающие частоты, меньшие wa, при которых наклон Lm (w) уменьшается на 20 дБ/дек; I — число сопрягающих частот wj.
Если
фаза фи определяется каким-либо другим
способом, то избыток фазы определяют
как
![]() (5.43) где
фи
<
0.
(5.43) где
фи
<
0.
Если избыток фазы уа оказывается меньше необходимого, то сопрягающую асимптоту следует переместить влево. В противном случае (при слишком большом избытке фазы) сопрягающая асимптота перемещается вправо. Чем больший диапазон частот занимает низкочастотная асимптота, тем лучше система воспроизводит низкочастотные изменения задающего воздействия.
Высокочастотная асимптота желаемой ЛАЧХ мало влияет на свойства системы, поэтому ее следует выбирать так, чтобы корректирующее устройство было возможно более простым. Это достигается при совмещении высокочастотных асимптот характеристик Lж (со) и L0 (w). Если совмещение не удается, то высокочастотная асимптота Lж(w) должна иметь тот же наклон, что и высокочастотная асимптота L0(w).
После
выбора высокочастотной асимптоты
желаемой ЛАЧХ и сопряжения ее со
среднечастотной асимптотой проверяют
избыток фазы уб
при
частоте wб,
где ордината характеристики Lж(w)
равна — Lм
т. е.
![]() (5.44)
(5.44)
где qср — относительный наклон среднечастотной асимптоты (при наклоне —20 дБ/дек qср = 1); w — сопрягающие частоты, большие частоты среза wср; т — число частот wy Если yб меньше требуемого значения, то высокочастотную асимптоту желаемой ЛАЧХ нужно переместить вправо.