

3.2. Управляющий комплекс Decont фирмы ДЭП.
Компания ДЭП - один из крупнейших отечественных производителей многофункциональных ПТК. Использование продукции компании наиболее эффективно там, где требуется собрать технологическую информацию от территориально распределенных объектов, управлять удаленным оборудованием.
Комплекс Decont является многофункциональным изделием и предназначен для создания на его базе разнообразных систем телемеханики, АСУ ТП, локальной автоматики и регулирования.
В состав комплекса входят программируемый управляющий контроллер, модули ввода/вывода, сменные интерфейсные платы, малогабаритный пульт оператора, стационарный пульт оператора, ПО управляющего контроллера и ПО верхнего уровня.
Контроллер Decont-182 играет ключевую роль в построении любой системы на базе комплекса Decont. Контроллер обслуживает взаимодействие с модулями ввода/вывода, ведет алгоритмы, архивы, поддерживает связь с другими контроллерами и консолью, позволяет организовывать разнообразные каналы связи между удаленными объектами автоматизации и консолью.
Характеристики контроллера Decont-182
-
Базовый процессор
ZILOG 80182
Частота
30 Мгц
Вспомогательный процессор
PIC16С73А
Энергонезависимое ОЗУ
512 Кб
Флэш-ПЗУ
512 Кб
Порты последовательной связи:
Порт А
RS-232
Порт В
RS-232/ RS-485
Порты C и D
сменные интерфейсы
Контроллер Decont является функционально законченным устройством, внутри которого реализованы две шины с различной пропускной способностью. Быстрая шина организует обмен данными между базовым процессором, ОЗУ и флэш-ПЗУ. Плотное расположение этих элементов делает шину компактной и гарантирует эффективную защиту от помех и максимальную скорость обмена. Вторая шина объединяет в единую информационную систему базовый и вспомогательный (супервизор системы питания) процессоры, часы РВ, EEPROM контроллера и сменных интерфейсных плат.
Вспомогательный процессор (супервизор системы питания) обеспечивает гарантированный запуск и корректное сохранение данных при аварийных ситуациях. Встроенное во вспомогательный процессор АЦП непрерывно контролирует состояние входного питания, состояние литиевой батарейки, температуры внутри корпуса контроллера.
Модули ввода/вывода.
Модули ввода/вывода комплекса Decont являются локальными УСО и осуществляют первичную обработку аналоговых и дискретных сигналов от датчиков и выдачу управляющих воздействий на исполнительные устройства.
Каждый модуль имеет выход в технологическую сеть на основе интерфейса RS-485. Обработанный сигнал преобразуется модулем в защищенный цифровой код для передачи в сеть. Из сети модуль получает команды на выдачу управляющих воздействий. Вычислительные мощности модуля позволяют также контролировать выход параметра за допустимые пределы, обеспечить взаимодействие с минипультом (в каждом модуле предусмотрено отдельное гнездо для подключения минипульта). Минипульт позволяет просмотреть значения переменных, подключенных к модулю, проверить подключение внешних цепей.
Р ис.
3.2.1. Сеть на базе контроллеров Decont.
ис.
3.2.1. Сеть на базе контроллеров Decont.
Среднее число модулей, задействованных на одном объекте, не должно превышать 20. На одном объекте должно быть от 1 до 3 территориально разобщенных мест, куда собирается информация с датчиков (система с максимум тремя сегментами). Управляющий контроллер обычно располагается в непосредственной близости от наиболее крупной группы модулей ввода/вывода (первый сегмент сети - рис. 3.2.1). Связь с этим сегментом осуществляется по встроенному интерфейсу RS-485 контроллера Decont.
Для организации двух других изолированных сегментов сети, необходимых для связи с двумя удаленными группами модулей, используется одна интерфейсная плата с двумя портами RS-485. Она устанавливается в контроллере на одно из двух свободных универсальных гнезд: С или D. На оставшееся свободное универсальное гнездо устанавливается интерфейсная плата для организации канала связи с удаленной консолью. На рис. 3.2.1 - это плата радиомодема для управления радиостанцией.
Коммуникационные возможности.
Базовый процессор имеет четыре независимых последовательных порта (A, B, C, D). Порт А поддерживает интерфейс RS-232, порт В - RS-232/RS-485. Порты C и D предназначены для установки съемных интерфейсных плат (интерфейсов) для расширения коммуникационных возможностей контроллера. Один контроллер Decont-182 позволяет подключать до двух интерфейсов, которые образуют "второй этаж" процессорного модуля (мезонинная архитектура). При включении питания интерфейсы автоматически идентифицируются, а с помощью минипульта производится их настройка. Электрическое подключение интерфейсов к контроллеру осуществляется благодаря разъемному соединению (40-контактный разъем), содержащему цепи питания, управления и т. д.
Размер каждой интерфейсной платы - 50 х 85 мм. Предлагаются следующие интерфейсные платы:
-
Z-RS-232 - контакты интерфейса соответствуют разъему IBM PC по сигналам и цоколевке;
-
Z-2-RS-485 - два гальванически изолированных порта, обеспечивающих скорость передачи информации до 460.8 Кбод;
-
Z-ALT - два изолированных канала типа токовая петля 20 мА;
-
Z-ML - модем на выделенную двухпроводную линию со скоростью передачи 300 и 1200 бод;
-
Z- MD - модем на коммутируемую линию со скоростью передачи 300 и 1200 бод;
-
Z-MR - радиомодем для подключения к типовой радиостанции (скорость - 300 и 1200 бод);
-
Z-GL - модем для выделенной оптоволоконной линии связи (скорость - до 460.8 Кбод).
П рименяемая
мезонинная технология установки
интерфейсных плат предоставляет
пользователю широкие возможности по
реализации как стандартных, так и
уникальных интерфейсов и протоколов,
обеспечивая простой и эффективный
способ адаптации к требованиям конкретного
проекта. Варианты построения простых
систем автоматизации приведены на рис.
3.2.2 и рис. 3.2.3.
рименяемая
мезонинная технология установки
интерфейсных плат предоставляет
пользователю широкие возможности по
реализации как стандартных, так и
уникальных интерфейсов и протоколов,
обеспечивая простой и эффективный
способ адаптации к требованиям конкретного
проекта. Варианты построения простых
систем автоматизации приведены на рис.
3.2.2 и рис. 3.2.3.
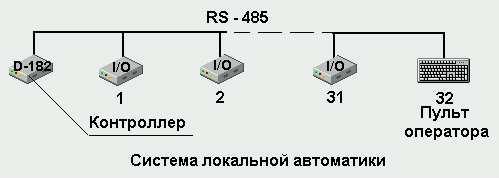 Рис.
3.2.2.
Простая система сбора данных.
Рис.
3.2.2.
Простая система сбора данных.
Рис. 3.2.3. Система локальной автоматики.
Контроллеры Decont легко объединяются в единое вычислительное пространство. Благодаря большим коммуникационным возможностям, а также встроенной программной поддержке распределения по контроллерам единой базы технологических сигналов объекта можно:
-
выделять наиболее быстрые технологические параметры в отдельные контуры контроля и управления;
-
создавать дополнительные гальванически изолированные сегменты для связи с удаленными "подобъектами" на территории одного объекта;
-
свободно наращивать коммуникационные интерфейсы для приема данных с интеллектуальных приборов;
-
создавать резервные каналы связи.
П ример
объединения трех контроллеров для
управления более сложным объектом
показан на рис. 3.2.4.
ример
объединения трех контроллеров для
управления более сложным объектом
показан на рис. 3.2.4.
Рис. 3.2.4. Вариант системы управления на базе контроллеров Decont.
На контроллер под номером 3 возложены стандартные функции контроля и управления модулями ввода/вывода, подключенными через четыре интерфейса RS-485. Контроллер 1 обеспечивает связь объекта с вышестоящим уровнем по основному и резервному модемным каналам. Вместо одной интерфейсной платы на модемный канал по выделенной линии можно установить радиомодем. Контроллер 2 через модули ввода/вывода, находящиеся на двух сегментах RS-485, управляет выходными параметрами объекта с малыми постоянными времени. Такая архитектура позволяет выдавать управляющие воздействия на объект в темпе с быстроменяющимися выходными параметрами.
Монтаж.
Контроллер Decont и модули ввода/вывода удобно размещать в защитных шкафах навесного типа BOX-F6, BOX-F12. Конструкция шкафов различается только размером: BOX-F6 вмещает 6 модулей ввода/вывода, контроллер Decont-182, блок питания, пульт индикации. Шкаф BOX-F12 - большего размера и вмещает до 9 модулей ввода/вывода (например, 24 аналоговых канала, 48 дискретных вводов и 24 дискретных вывода).
Встроенное ПО контроллера Decont-182.
Базовой средой функционирования ПО является многозадачная ОСРВ RTMEX-182, оперирующая понятиями задача, обменник, сообщение. Основу встроенного ПО контроллера составляют задачи, ответственные за обработку поступающей извне информации, ее архивирование, принятие решений по управлению, поддержку связи с другими контроллерами, модулями ввода/вывода и компьютерами.
Для обмена данными между задачами, находящимися в различных контроллерах или компьютерах, имеются развитые сетевые решения типа клиент-сервер. В любом контроллере, присутствующем в системе, может присутствовать несколько параллельно функционирующих задач. Такие задачи могут как инициировать обмен с другими задачами (клиенты), так и предоставлять данные (серверы).
Табличное конфигурирование. Встроенное базовое ПО контроллера учитывает все особенности и возможности аппаратных и сетевых средств и позволяет простым конфигурированием (заданием параметров) программных компонент полностью управлять режимами работы всего комплекса и конкретных контроллеров. Все узлы сети (контроллеры и компьютеры) конфигурируются одинаковым способом. Конфигурация системы запоминается ПО верхнего уровня. Ее можно просматривать, редактировать, записывать в узлы, (на месте установки или через сеть). Все конфигурационные параметры доступны для просмотра и модификации через технологическую сеть.
В комплект системы Decont входит малогабаритный пульт оператора с жидкокристаллическим дисплеем 2 х 20 (две строки по 20 символов) и шестью клавишами. Он может подключаться к любому модулю. Встроенный в минипульт микропроцессор обеспечивает доступ ко всем сигналам, измеряемым модулями ввода/вывода, а также к большинству программируемых параметров контроллеров.
Стационарный пульт оператора предназначен для установки на передней стенке защитных шкафов. Функциональная и прикладная клавиатуры позволяют решать самые сложные задачи интерактивного взаимодействия с оператором. Прикладная клавиатура представляет собой матрицу 16 х 16, на которую наклеивается панель с представлением сигналов контроля/индикации конкретного объекта.