

41. Пристрої управління із жорсткою логікою
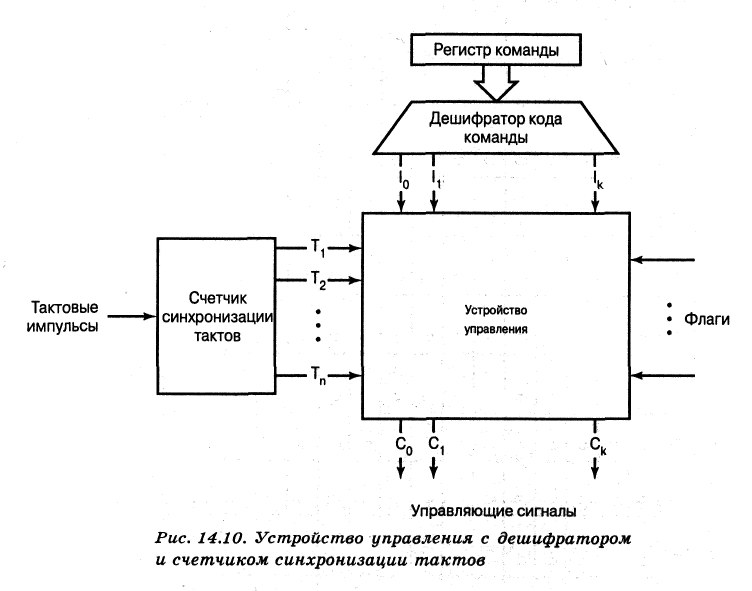
Основными входными сигналами для него являются тактовые импульсы, код в регистре команд, флаги и управляющие сигналы магистрали. Коды флагов и управляющие сигналы магистрали подаются в устройство управления непосредственно, без промежуточного преобразования, а код команды и тактовые импульсы предварительно обрабатываются.
Сначала рассмотрим код команды. Устройство управления должно проанализировать код команды и сформировать соответствующий набор управляющих сигналов, свой для каждой команды. Для упрощения работы устройства управления каждый вариант кода команды желательно преобразовать в отдельный сигнал. Такое преобразование выполняется дешифратором — схемой, которая каждую кодовую комбинацию на входных линиях преобразует в сигнал на одном из множества выходов. В общем случае дешифратор имеет п входных линий и 2" выходных. Каждая из 2" двоичных кодовых комбинаций на п входных линиях возбуждает сигнал на одной из 2" выходных линий. Пример такого преобразования представлен в табл. 14.3. Дешифратор в реальном устройстве управления имеет более сложную формулу преобразования, поскольку в процессорах часто код команды имеет переменную длину. С примерами схемной реализации дешифраторов вы сможете познакомиться в приложении А.
Узел синхронизации устройства управления формирует повторяющуюся последовательность импульсов. Период следования тактовых импульсов должен быть достаточно большим, чтобы в течение этого времени сигналы могли распространиться по линиям магистралей и пройти через логические схемы процессора. Как будет показано далее, в каждом такте машинного цикла обработки команды устройство управления формирует свою последовательность сигналов. Поэтому тактовые импульсы подаются на вход счетчика синхронизации, а его выходы используются устройством управления в качестве номера текущего такта. В конце цикла счетчик сбрасывается в исходное состояние, соответствующее такту t1.
На схеме, представленной на рис. 14.10, показаны дешифратор и счетчик синхронизации тактов.
Логическая схема устройства управления
Теперь нам осталось рассмотреть, как с помощью логических комбинационных схем входные сигналы преобразуются в устройстве управления в выходные. По существу, нам необходимо для каждого формируемого управляющего сигнала построить булеву функцию преобразования комбинации входных сигналов. Лучше всего это пояснить на примере. Вернемся вновь к примеру, представленному на рис. 14.5. В сопутствующей примеру табл. 14.1 выписаны последовательности микроопераций и управляющих сигналов для трех из четырех фаз цикла обработки команды.
Рассмотрим один из управляющих сигналов -— С5. По этому сигналу данные с внешней магистрали считываются в регистр MBR. Этот сигнал в табл. 14.1 используется дважды. Определим два новых управляющих сигнала, Р и Q, комбинация которых определяет текущую фазу цикла обработки командам!
PQ — 00 фаза извлечения
PQ = 01 фаза косвенной адресации
PQ = 10 фаза выполнения
PQ = 11 фаза прерывания