

Задание 4. Силы инерции. Принцип Даламбера.
Найти:
Числено значение сил инерций всех тел системы, указать на чертеже их направление. С помощью принципа Даламбера определить натяжение нити между первым и вторым телом, сравнив с результатом задания 1, выделить статическую и динамическую составляющую этого натяжения.
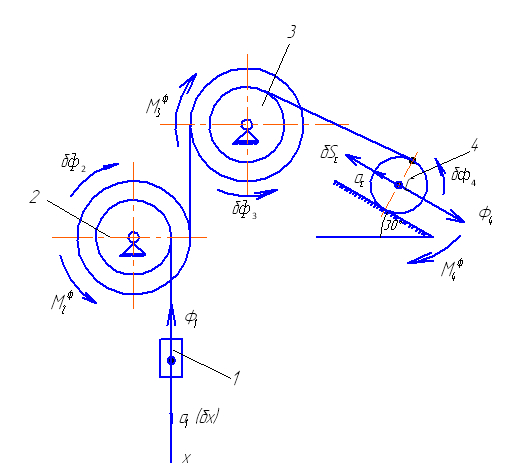
Рис. 4. Силы инерции (направление вектора бф2, совпадает с ε).
В случаи поступательного движения силы инерции сводится к силе:
Ф = m*a;
В случаи вращательного движения силы инерции сводятся к крутящему моменту:
Мф = J*ε; J – момент инерции плоского тела относительно оси вращения, (ε выразим через a1).
Найдём силы инерции для данной системы:
Ф1 = m1*a1; Ф1 = 18,24 (н)
М 2ф = J2*ε2 = m2*R22 ; М 2ф= 2,73 (н*м)
М 3ф = J3*ε3 = m3*R32 ; М 3ф = 5,47 (н*м)
Ф4 = m4*ac = m4 ; Ф4 = 1,52 (н)
М 4ф = J4*ε4 = m4*R42 ; М 4ф = 0,77 (н*м) Система находится в равновесии под действием сил
{
Р1;
Р2;
Р3;
Р4;
R2х;
R2у;
R3х;
R3у;
N4;
М; Ф1;
М 2ф
;
М 3ф
;
Ф4;
М 4ф
} 0;
0;
Разобьём систему и рассмотрим 1-е звено.

Для определения натяжения нити, между 1 и 2-м звеном, применим силу инерции Ф1 и согласно принципу Даламбера рассмотрим равновесие плоской системы сходящихся сил {Р1; Т; Ф1} 0;
= -Т - Ф1 + Р1;
 =
0;
=
0;
Что бы выразить Т, сумму сил действующих на оси Х прировняем к нулю.
-Т - Ф1 + Р1 = 0
Т = Р1 - Ф1, Ф1 = m1* a1;
Т = Тст + Тдаб; Тст = Р1, Тдаб = m1* a1;
Т = 120 + 18,24 = 138, 24 (н)
Если сравнить натяжение нити, полученное в первой работе и данной, натяжение различны на величину Тдаб.
Задание 5. (принцип возможных перемещений)
Найти: соотношение между параметрами задачи, при котором система находится в равновесии.
5.1 Считаем известными все параметры, представленные в таблице 1, кроме М. в этом случи определим величину момента М, при котором система будет равновесна.
Определим условие равновесия механической системы с помощью принципа виртуальных перемещений. Рассматриваемый механизм имеет одну степень свободы, т.е. одно независимое виртуальное перемещение. В качестве этого перемещения, не нарушающего связей, наложенных механизм, выберем перемещение σх 1-го тела, направленное в сторону положительного значения х. Возможное перемещение других точек механизма можно выразить через σх.
σА
=

σA
= A(P1)
+ A(M) + A(P4)
= P1*σS1
–
M*σφ2
+ P4*σSc
=
= P1*σx
-
M + P4
+ P4
 =
σx(P1
–
+ P4
=
σx(P1
–
+ P4
 )
= Qσx;
)
= Qσx;
5.2 Q = P1 – - P4 = m1g – – m4g ;
Q = 114,94
Задание 6. (принцип Даламбера-Лагранжа)
Необходимо исследовать движение системы с помощью принципа Даламбера-Лагранжа.
Получить дифференциальное уравнение движения системы, т.е. дифференциальное уравнение относительно обобщенной координаты х(t).
Принцип Даламбера-Лагранжа – это объединение двух принципов: принципа Даламбера, который сводит задачи динамики к статике путём введения сил инерции, и принципа виртуальных перемещений, формулирующего необходимое и достаточное условия равновесия систем.
p = 1; q = х(t);
6.1 вычисление работы виртуальных перемещений.
σА
+ σАф
=
0, где σА =
;
σАф
=
 ;
;
σA = A(P1) + A(M) + A(P4) = P1*σS1 – M*σφ2 + P4*σSc = = P1*σx - M + P4 =σx(P1 – + P4 ) = σx(P1 – + P4 );
σA = Qσx;
6.2 вычисление сил инерции.
Ф1 = m1*a1; Ф1 = 18,24 (н)
М 2ф = J2*ε2 = m2*R22 ; М 2ф= 2,73 (н*м)
М 3ф = J3*ε3 = m3*R32 ; М 3ф = 5,47 (н*м)
Ф4 = m4*ac = m4 ; Ф4 = 1,52 (н)
М 4ф = J4*ε4 = m4*R42 ; М 4ф = 0,77 (н*м)
σАф = - Ф1*σх - М 2ф*σφ2 - М 3ф*σφ3 - М 4ф*σφ4 - Ф4*σ Sс =
=
m1*a1*σх
-
m2*R22
*σφ2
-
m3*R32
*σφ3
-
m4*R42
*σφ4
-
m4
 *
σ
Sс
=
*
σ
Sс
=
=
-
a1(m1*
σх +
m2*
 2*σx
-
m3(
)2*σх
+
m4(
)2*σх
+
m4(
2*σx
-
m3(
)2*σх
+
m4(
)2*σх
+
m4(
 )*
σ
х)
=
)*
σ
х)
=
= - a1* σх(m1 + m2* 2 - m3( )2 + m4( )2 + m4( )2);
σАф = - a1* σх*В; В = m1 + m2* 2 - m3( )2 + m4( )2 + m4( )2;