

Петрозаводский государственный университет Физико-технический факультет Курсовая работа
Дисциплина: Прикладная механика.
Тема: Кинематический анализ механизма.
Работу выполнил
студент 21209 группы Кашин С.С
Работу принял
преподаватель Михалёв В.Р.
Петрозаводск 2011
Контрольная работа №1 Кинематическое исследование механизма.
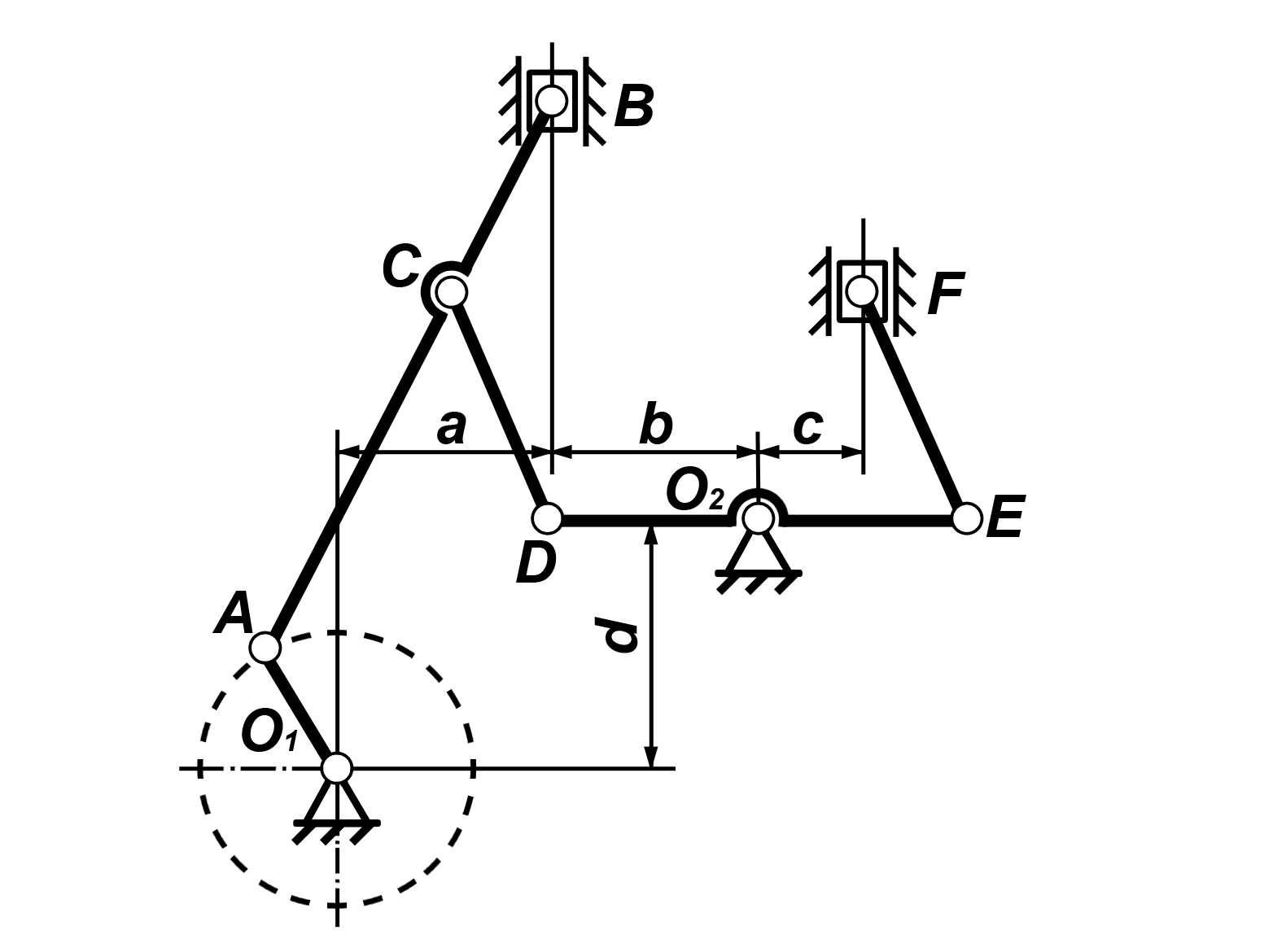
Дано: a=0,19 м; b=0,19 м; c=0,10 м; d=0,22 м; О1А=0,12 м; О2D= 0,19 м; АВ=0,55 м; ВС=0,19 см; СD=0,23 м; DЕ=0,38 м; EF=0,22 м.
Придерживаясь установленного порядка кинематического исследования механизма, выбираю масштаб μl.
Здесь О1А= 0,12 изображаю это звено
на плане положений отрезком ![]() =24
мм.
=24
мм.
μl=О1А/ =0,12/24=0,005 м/мм
Используя зависимость μl=
l/![]() , определяю длины остальных звеньев
механизма на плане положений
, определяю длины остальных звеньев
механизма на плане положений
![]()
Звено |
l (м) |
(мм) |
a |
0,19 |
38 |
b |
0,19 |
38 |
с |
0,10 |
20 |
O1A |
0,12 |
24 |
O2D |
0,19 |
38 |
AB |
0,55 |
110 |
BC |
0,19 |
38 |
CD |
0,23 |
46 |
DE |
0,38 |
76 |
EF |
0,22 |
44 |
В принятом масштабе μl= 0,005 м/мм по известным размерам a, b и c получаю неподвижные точки О1, О2 и направляющие ползунов B и F. Провожу траектории точек A, D и E. Траектория точки A – окружность радиуса O1A, траектории точек E и D – дуги соответствующих радиусов O2E и O2D, причём O2E = O2D.
За начальное (нулевое) положение механизма и всех его звеньев принимаю положение, при котором кривошип O1A и шатун AB будут лежать на одной линии . Для этого нужно из точки О1 , радиусом равным (О1А+АВ), сделать засечку на направляющей ползуна В, полученную точку В0 соединяю прямой О1В0. На пересечении траектории точки A с О1В0 получаю точку А0. Из точки B0 радиусом BC делаю засечку на прямой A0В0- это и будет точка С0.
Для определения положения точки D0 из точки C0 делаю засечку радиусом CD на траектории точки D. Полученную точку D0 соединяю прямыми O2D0 и C0D0.
Для нахождения точки E0 продолжаю прямую O2D0 до пересечения с траекторией точки E. Полученную точку E0 соединяю прямой O2E0.
Для определения точки F0 из точки E0 делаю засечку радиусом EF на направляющей ползуна F, полученную точку F0 соединяю прямой E0F0.
Разделив траекторию точки A на шесть равных частей, аналогичным методом нашёл остальные положения всех точек звеньев механизма.