

62 Роторные автоматические линии (рал)
РАЛ – это комплекс 2х или более роторных машин установленных в технологической последовательности на общей станине и объединенных системой транспортировки, привода и управления.
РАЛ включает в себя:
1) технологические роторы, на которых производится обработка, сборка, расфасовка, ТО и тд.
2) транспортные, которые предназначены для загрузки, передачи и выгрузки объекта обработки.
3) системы обслуживания.
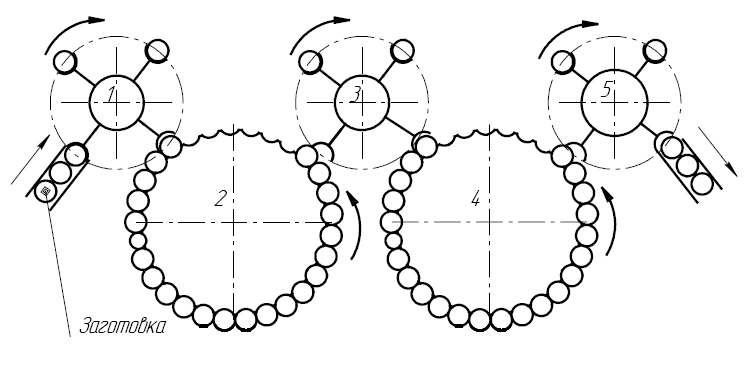
Одной из основных особенностей РАЛ является то, что операции обработки деталей, а также подвод и отвод инструмента производится одновременно с перемещением объекта обработки, в связи с тем, что в каждом рабочем роторе может быть размещено достаточно большое количество обрабатывающих, сборочных или контрольных блоков, выполняющие параллельное со сдвигом по фазе одни и те же операции. РАЛ обеспечивают очень большую производительность, в связи с этим РАЛ используют в массовом производстве.
Преимущества РАЛ:
1) высокая производительность, которая достигается за счет параллельной работы в одном роторе одинаковых инструментов.
2) возможность объединения операций разной деятельности.
3) независимость производительности линии от продолжительности самой технологической операции.
РАЛ используют при автоматизации простых деталей без снятия стружки ( штамповка, вытяжка и тд.).
63 Автоматизация серийного производства
Недостатком АЛ являются их узкая ориентация на изготовление определенного вида изделий. В связи с этим их можно использовать, где производство носит массовый устойчивый характер.
В промышленности развитых стран крупносерийное и массовое производство составляют 20%, а единичное и мелкосерийное 80%.
Задача автоматизации серийного производства решается путем создания гибких автоматизированных производств (ГАП), т.е. с использованием гибкого оборудования, к которому относятся станки с ЧПУ, тип обрабатывающего центра, промышленные роботы.
Основная цель создания ГАП – это возможность переходить с выпуска одного изделия к другому практически без переналадки оборудования. Если же в каких-либо случаях требуется переналадка, то она осуществляется одновременно с выпуском предыдущего изделия.
Основной составной единицей при создании ГАП является комплекс оборудования или так называемый гибкий производственный модуль (ГПМ).
ГПМ – это единица технологического оборудования с ЧПУ и средствами автоматизации технологического процесса, автономно функционирующая, осуществляющая многократные автоматические циклы, обладающее свойствами автоматизированной переналадки деталей широкой номенклатуры в пределах технологического назначения и установленных технических характеристик, а также имеющие возможность встраивания в гибкую производственную систему.
В общем случае ГПМ включает в себя: накопители, спутники, средства загрузки и выгрузки, устройства замены технологической оснастки, устройства автоматизированного контроля, включая диагностирование и тд. ГПМ и другие станки с ЧПУ объединяются в ГПС.