

Магнітні підсилювачі з самонасиченням
Кращі динамічні характеристики, тобто меншу інерційністб при даному kP, мають магнітні підсилювачі з самонасиченням. Найпростіша схема магнітного підсилювача з самонасиченням, на базі якої будуються більш складні схеми, дана на рисунку 5.14. Ідеалізована петля гістерезису феромагнітного сердечника магнітного підсилювача представлена на рис. 5.15. Наявність випрямляча В (див. рис. 5.14) в ланцюзі робочої обмотки
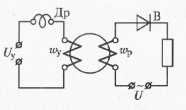
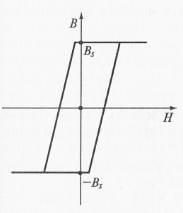
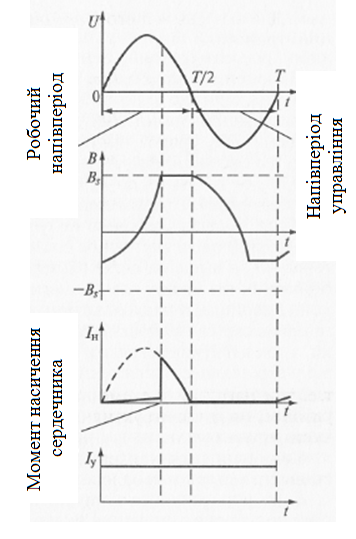
Рисунок 5.14 – Схема однотактного
магнітного підсилювача з само-
насиченням
Рисунок 5.15 – залежність індукції В Рисунок 5.16 – Діаграма зміни індук-
від напруженості магнітного поля Н ції В, струму навантаження ІН та феромагнітного сердечника струму керування ІУ в часі t
(обмотка wР підсилювача, послідовно з якої включене навантаження RH) призводить до того, що напруга живлення U прикладено до цієї обмоки і навантаження лише протягом робочого для напівперіода випрямляча, коли він проводить електричний струм.
Відповідно до закону електромагнітної індукції зміна індукції в робочому сердечнику підсилювача в цей напівперіод відбувається тільки під дією напруги живлення U:
де S - поперечний переріз сердечника.
У наступний напівперіод зміна індукції в сердечнику відбувається тільки під дією керуючого напруги Uy, прикладеного до обмотки управління wУ. Цей напівперіод називається керуючим.
Для того, щоб перешкодити трансформації напруги з робочого ланцюга в ланцюг управління, в останню включають або дросель Др, або вентиль.
Зміна індукції в робочому і керуючому напівперіодах відбувається у взаємообратних напрямках. Зазвичай напругу живлення магнітних підсилювачів U вибирають такою, щоб за час Т/2, рівний напівперіоду живлячої напруги, воно було б здатне змінити індукцію в осерді на величину В = 2BS, від точки -Bs до Bs, де Bs - індукція насичення матеріалу сердечника. Ця зміна пропорційна вхідному сигналу. Якщо до початку робочого напівперіоду вихідна робоча точка, що характеризує магнітне стан сердечника, виявиться не в точці -Bs, а вище на петлі гістерезису, то в робочому напівперіоді сердечник за законом електромагнітної індукції насититься не в кінці періоду, а дещо раніше. Після цього напруга живлення виявиться повністю прикладеної до опору навантаження, а струм у навантаженні стрибком зросте до І = UМАХ sinωt/R. Чим більше керуюча напруга, тим нижче по петлі гістерезису опуститься робоча точка в керуючий напівперіод. У результаті в робочий напівперіод сердечник насититься пізніше, і до навантаження буде прикладена менша напруга. При максимальній керуючій напрузі через навантаження протягом усього робочого напівперіоду протікає тільки струм намагнічування.
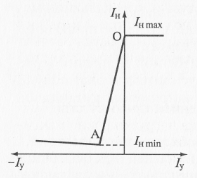
Рисунок 5.17 – Статична характеристика однотактного магнітного пісилювача з самонасиченням
Якщо керуюча напруга дорівнює нулю, то в керуючий напівперіод індукція не змінюється і вихідною точкою струму буде точка Bs. Отже, протягом усього робочого на півперіоду струм у навантаженні буде слідувати за зміною напруги.
Діаграми зміни індукції В в осерді, струму навантаження ІН, струму в обмотці управління ІУ в часі t дані на рисунку 5.16. Залежність струму ІН навантаження від струму ІУ в обмотці управління для магнітних підсилювачів з самонасиченням наведена на рисунку 5.17.
Характеристики подібного типу називаються статичними характеристиками, а ділянка АО - робочою ділянкою. Магнітний підсилювач, що має статичну характеристикою, зображену на рисунку 5.17, називають однотактним (нереверсивним). Основна особливість такого підсилювача в тому, що при зміні полярності керуючого сигналу струм у навантаженні, змінюючись за значенням, залишається весь час однополярним.
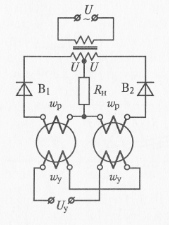
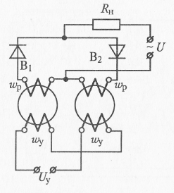
Рисунок 5.18 – Схема магнітного Рисунок 5.19 – Схема магнітного
підсилювача з навантаженням підсилювача з навантаженням
змінним струмом постійним струмом
Схема, наведена на рис. 5.14, є основою - типовим елементом при створенні більшості сучасних магнітних підсилювачів. Робочі напівперіоди двох сердечників у схемах на рис. 5.18, 5.19 зрушені один щодо одного на половину періоду живлячої напруги. Обмотки управління двох сердечників з'єднані між собою так, щоб в ланцюзі управління не наводити напругу живлення. Якщо в однотактному магнітному підсилювачі (див. рис. 5.14) струм на виході з'являється лише протягом одного з напівперіодів живлячої напруги, то в підсилювачах, представлених на рис. 5.18, 5.19, він з'являється протягом кожного напівперіоду живлячої напруги.
У той час як один з сердечників знаходиться в робочому напівперіоді і струм від джерела може протікати через його робочу обмотку wP і навантаження, один з діодів блокує робочу обмотку іншого сердечника, для якого настає керуючий напівперіод, тобто його індукція змінюється під дією вхідного сигналу. У наступному напівперіоді сердечники міняються ролями. У схемі на рис. 5.18 через навантаження протікає змінний струм тієї ж частоти, що і напругу живлення, а в схемі на рис. 5.19 - випрямлений двухполуперіодний струм.
У магнітних підсилювачах з самонасиченням за відсутності керуючого сигналу середнє значення струму навантаження є рівним максимальному IHmax. Однак іноді буває необхідно при відсутності сигналу на вході підсилювача отримати мінімальний струм у навантаженні. Тому в магнітних підсилювачах часто передбачається так зване зсув або початкове підмагнічування, що рівноцінно включенню додаткової керуючої напруги. Під дією напруги зміщення зміна індукції в керуючому напівперіоді відбувається навіть при відсутності сигналу управління. Чим більше напруга
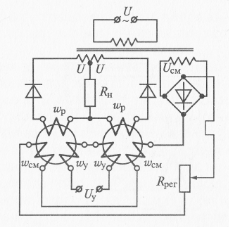
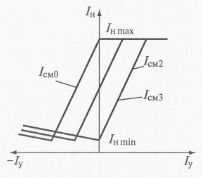
Рисунок 5.20 – Переміщення статичної Рисунок 5.21 – Схема магнітного
характеристики у залежності від підсилювача зі зміщенням
струму зміщення постійним струмом
зміщення, тим нижче по петлі гістерезису переміститься робоча точка.
У тому випадку, коли на вхід підсилювача подається також сигнал управління, переміщення робочої точки в керуючий напівперіод визначається сумою напруженостей, створюваних сигналами зсуву і управління (якщо ці сигнали викликають зміну намагніченості сердечника в одному напрямку), або їх різницею (якщо дія сигналів протилежна) . Введення початкового підмагнічування дозволяє як би переміщати статичну характеристику підсилювача вздовж осі абсцис в залежності від значення струму зміщення (рис. 5.20). Очевидно, що при зміні струму зміщення Ісм струм на виході підсилювача при відсутності керуючого сигналу Іу може приймати будь-які значення від IHmax до IHmin.
Принципово зміщення у магнітних підсилювачах може здійснюватися трьома способами: постійним або випрямленим струмом, змінним струмом, шунтуванням випрямлячів в робочому ланцюзі опором. Найбільш широко застосовується зсув постійним струмом (рис. 5.21). Обмотки зміщення зазвичай виконуються так само, як і обмотки управління. Послідовно з обмотками зміщення для регулювання струму в них включають додатковий опір.