

16 Передаточные функции дискретных систем. Пример дискретной системы
Использование Z-преобразования для анализа дискретных систем во многом аналогично использованию преобразования Лапласа при анализе непрерывных систем. Необходимым этапом такого анализа является нахождение передаточной функции дискретной системы, которая определяется как отношение Z-преобразований выходного и входного процессов системы при нулевых начальных условиях в системе. Познакомимся с методикой определения передаточной функции дискретной системы на примере системы, изображённой на рис. 9.2.
Рис.9.2. Пример дискретной системы
На рисунке приведены следующие обозначения:
 -
дискриминационная характеристика,
-
дискриминационная характеристика,
 -
импульсный элемент,
-
импульсный элемент,
 -
выходной процесс системы,
-
выходной процесс системы,
 ,
,
 - коэффициенты передачи звеньев.
- коэффициенты передачи звеньев.
На выходе импульсного элемента формируется напряжение:

При подаче его на вход фильтра с коэффициентом передачи на его выходе образуется процесс:
 ,
где
,
где
 - импульсная переходная функция фильтра.
- импульсная переходная функция фильтра.
По теореме свёртки и равенству имеем:
 ,
,
где
 -
изображение импульсной переходной
функции
,
совпадающей с Z-
изображением передаточной функции
-
изображение импульсной переходной
функции
,
совпадающей с Z-
изображением передаточной функции
 ,
связанной с
преобразованием Лапласа.
,
связанной с
преобразованием Лапласа.
Ошибка слежения в рассматриваемой системе равна:
где
 -
Z-изображение
процессов
и
,
-
Z-изображение
процессов
и
,
 ,
,
где
 -
z-
изображение функции
-
z-
изображение функции
 ,
являющейся передаточной функцией
приведённой непрерывной части системы.
,
являющейся передаточной функцией
приведённой непрерывной части системы.
Из
формул
 и
имеем:
и
имеем:
 .
.
Подставив
это выражение в формулу для
 ,
получим:
,
получим:
 .
.
Отсюда следует, что искомая передаточная функция рассматриваемой замкнутой дискретной системы описывается соотношением:
 .
.
При
анализе ошибок слежения в тактовых
точках используется передаточная
функция
 ,
связывающая z-
изображения воздействия
и ошибки слежения
.
,
связывающая z-
изображения воздействия
и ошибки слежения
.
Так
как
,
то
17 Разностные уравнения
Знание
передаточной функции дискретной системы
позволяет описать связь между дискретными
процессами на её входе и выходе с помощью
разностного уравнения. Чтобы получить
это уравнение, представим передаточную
функцию
 системы в виде дробно-рациональной
функции переменной
системы в виде дробно-рациональной
функции переменной
 :
:
 .
.
Подставив
это выражение в уравнение
 ,
запишем:
,
запишем:
 .
.
Применим
теорему обращения к обеим частям этого
уравнения. Используя первую теорему
смещения и полагая, что
 при
при
 получаем:
получаем:
 ,
,
где
введены обозначения
 ,
,
 .
.
Решив
это уравнение относительно
 ,
представим его в виде:
,
представим его в виде:
 .
.
Это
выражение является разностным уравнением,
связывающим значения выходного процесса
 с его значениями в предшествующих
тактовых точках и значениями воздействия
в моменты времени
с его значениями в предшествующих
тактовых точках и значениями воздействия
в моменты времени
 ,
,
 ,
…,
,
…, .
.
18 Коплексные коэффициенты передачи дискретной системы. Условия устойчивости дискретных сау
Если
- передаточная функция и
 ,
то
,
то
 .
.
Физический
смысл комплексного коэффициента передачи
дискретной системы заключается в
следующем. На вход дискретной системы
подаётся воздействие
 .
Возникающий при этом в установившемся
режиме выходной процесс
показан сплошной линией на рис.9.3. Как
видно из рисунка выходной процесс
является несинусоидальным, но в точках
.
Возникающий при этом в установившемся
режиме выходной процесс
показан сплошной линией на рис.9.3. Как
видно из рисунка выходной процесс
является несинусоидальным, но в точках
 совпадает со значениями непрерывного
синусоидального процесса, имеющего
частоту
и комплексную амплитуду
совпадает со значениями непрерывного
синусоидального процесса, имеющего
частоту
и комплексную амплитуду
 .
Комплексный коэффициент передачи
.
Комплексный коэффициент передачи
 дискретной системы равен отношению
комплексной амплитуды
к комплексной амплитуде
дискретной системы равен отношению
комплексной амплитуды
к комплексной амплитуде
 входного воздействия.
входного воздействия.
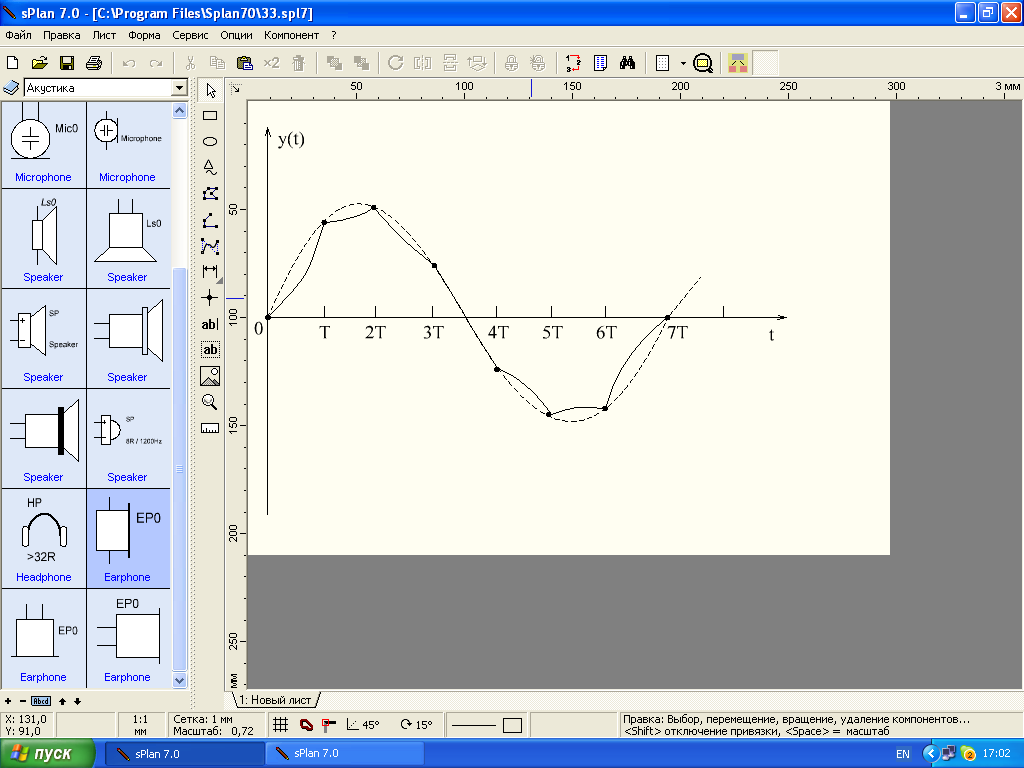
Рис.9.3. К понятию комплексного коэффициента передачи дискретной системы