

Контрольні питання
1 З яких основних частин складається голівка швацької машини?
2 Які види механізмів використовуються в швацькому устаткуванні?
3.Учому полягає відмінність робочих органів машини від інших деталей машини?
4 Чим розрізняються вал і вісь?
5 Чим розрізняються шатун і важіль?
2.2. Складання кінематичних схем механізмів швацьких машин
Конструкцію механізмів швацької машини, принципи їх роботи і їх регулювання зручно вивчати за плоскими або просторовими кінематичними схемами.
Під кінематичною схемою механізмів машини розуміється спрощене представлення деталей механізмів для відображення структури і умов перетворення і передачі дій. Умовне позначення деталей, що не увійшли до таблиці. 2.1, слід виконувати таким, аби воно відображало конструктивні особливості деталі, що впливають на характер перетворення руху, або особливі функціональні можливості. Наприклад, нитепритягиватель має дві осі і вільний кінець з вушком; його позначення аналогічно шатуну, але з віддзеркаленням його зігнутої форми і вушка.
При складанні кінематичної схеми необхідно дотримуватися певних правил:
розташування деталей на схемі повинне відповідати їх розташуванню в машині;
слід відображати дійсні взаємозв'язки з іншими деталями машини;
схема повинна давати уявлення про характер перетворення руху;
мають бути вказані конструктивні особливості деталі, що визначають регулювання в машині (прорізи в деталях, місця стиковки деталей і ін.);
не слід ускладнювати схему конструктивними подробицями деталей і деталями, що не впливають на характер руху, регулювання і дію механізмів.
Просторова кінематична схема виконується в системі координат ХУ2(рнс. 2.2, а), де вісь ординат ОГрасполагает-ся вертикально, вісь ОХ проводиться під кутом 7° від горизонталі вгору, а вісь 02- під кутом 4Г від горизонталі вниз.
Розглянемо кінематичну схему для механізму голки швацької машини човникового стібка.
Побудова схеми починається з вивчення конструкції механізму, його деталей, їх розташування і руху в машині і наявних регулювань і тому подібне Для механізму голки (мал. 2.2, би) робочим органом є голка /. Механізм голки складається з кривошипа 8, закріпленого на головному валу 10 гвинтом і штифтом. Головний вал 10 проходит в підшипнику кочення 9. У кривошипі 8 закріплений палець 6, на який надіта верхня голівка шатуна //. Між шатуном // і пальцем 6 вставлений голчаний підшипник 7. Нижня голівка шатуна // надіта на повідець (важіль) 3, який за допомогою стягуючого гвинта 4 сполучений з игловоди-телем 2. Циліндрова частина повідця 3 вставлена в отвір повзуна 14. Повзун знаходиться між тими, що направляють 13. Що направляють 13 закріплені в рукаві машини гвинтами 12. Игловоди-тель 2 проходит в двох втулках (підшипниках ковзання) 5, які закріплені гвинтами в рукаві машини. На нижньому кінці нгловодителя 2 за допомогою гвинта 15 закріплена голка /.
Оскільки кріплення гвинтами направлящих 13 і втулок 5 в рукаві машини можна замінити на кінематичній схемі заштрихованими поверхнями, то гвинти на мал. 2.2 не показані
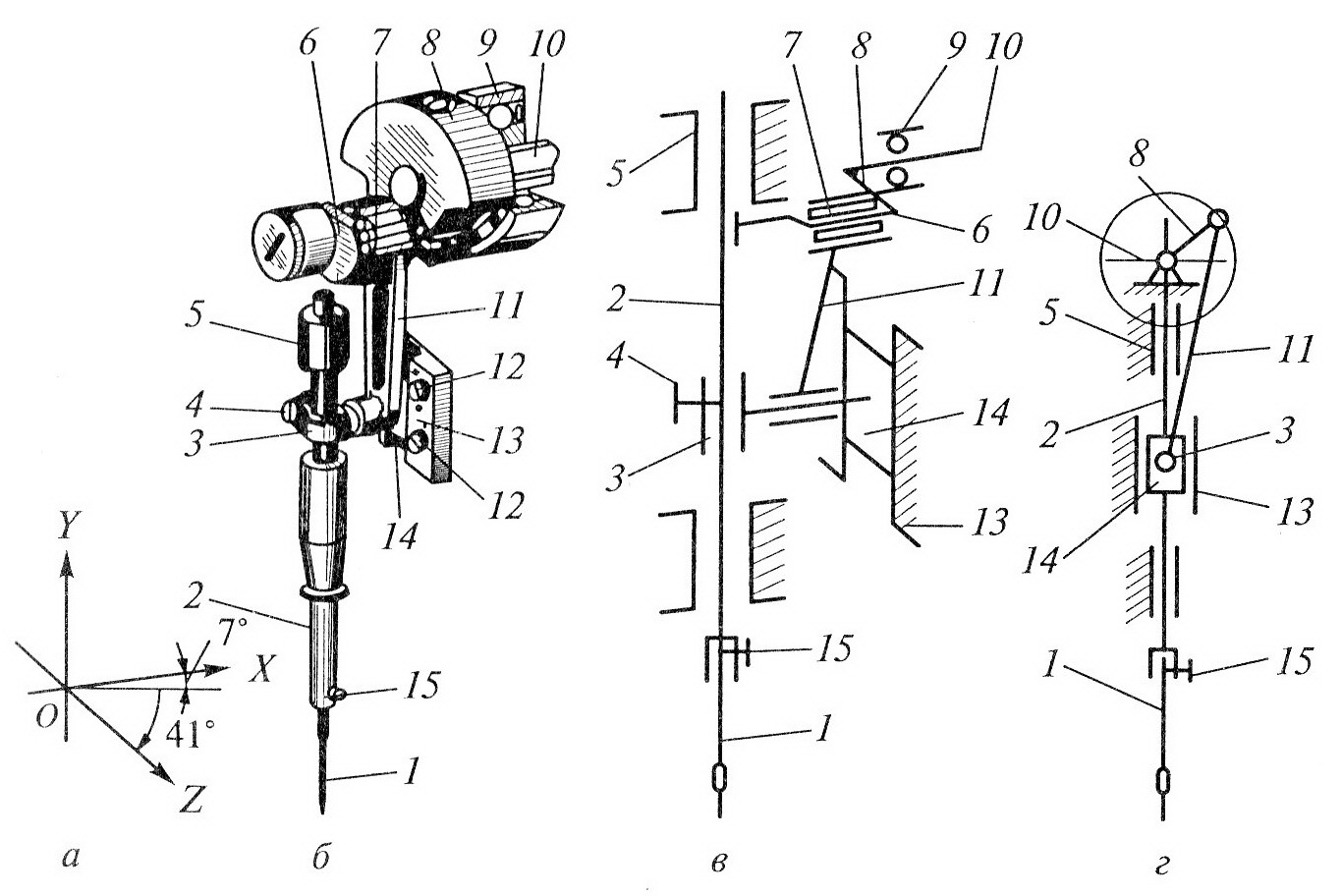
Рис. 2.2. Елементи кінематичних схем механізму голки машини 397 М кл
Просторова кінематична схема (мал. 2.2, в) відображає реальне взаємне розташування деталей. Головний вал 10 розташований горизонтально, тобто збігається з віссю ОХ. На його передньому кінці є кривошип 8, шатун 11 і повідець 3. Один кінець повідця 3 входить в повзун 14, а інший - надітий на игловодитель 2. Оскільки голка / у швацькій машині човникового стібка переміщається вертикально, те положення игловодителя 2 збігається з напрямом осі ОУ. Гвинт 4 служить для регулювання, тому на схемі він необхідний, оскільки відображає місце роз'єму кінематичного зв'язку між валом 10 і голкою / для виконання регулювання по висоті.
Плоска схема механізму голки (мал. 2.2, г) простіша, але не дає можливості представити складний просторовий механізм, рух деталей в різних площинах (наприклад, механізм петлителя в машині, що кушнірує, 10-би). Тому далі користуватимемося просторовими кінематичними схемами.
При побудові плоскої кінематичної схеми всі деталі проектуються на площину, в даному випадку вертикальну, паралельну площині обертання кривошипа. Якщо це нездійсненно, то інші площини розташовують в основній, тобто в тій, в якій є переміщення робочого органу механізму.
Дія механізму з кінематичної схеми розглядається в такій послідовності: визначають положення робочого органу механізму і ланцюг (ланцюги) деталей, які повідомляють робочому органу рух від головного валу, вивчають процес передачі руху робочому органу, починаючи з головного (розподільного) валу машини.
Регулювання в механізмі машини можливе в місцях з'єднання через стягуючі гвинти важелів на валах, осях або інших деталях, що несуть. Місця регулювань відображують подовженими лініями у важелі, регулювальними гвинтами, регулювальними гайками, куркульками і ін.