

8 Сложный зубчатый механизм
8.1 Структурный анализ
Данный сложный зубчатый механизм образован соединением трёх простых зубчатых передач и планетарного механизма.
Сложный зубчатый механизм является плоским, следовательно, подвижность определяем по формуле Чебышева:
![]() (8.1)
(8.1)
Составим таблицу по которой определим количество подвижных звеньев:
№ п.п |
Номер звена |
Вид совершаемого движения |
Схема |
Кинематическое состояние |
1 |
1 |
вращательное |
|
подвижное |
2 |
2 |
вращательное |
|
подвижное |
3 |
3 – 3’ |
вращательное |
|
подвижное |
4 |
4–4’ |
сложное |
|
подвижное |
5 |
Н-6 |
вращательное |
|
подвижное |
6 |
5 |
- |
|
Неподвижное |
7 |
7 |
вращательное |
|
подвижное |



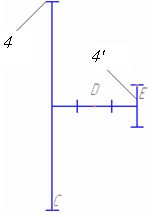

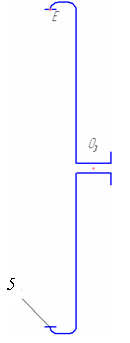

Анализируя схему, видим, что механизм состоит из стойки 0, представленной четырьмя шарнирно неподвижными опорами, и шестью подвижными звеньями (1; 2; 3-3'; 4-4`; Н-6; 7).
Колесо 5 является неподвижным звеном и относится к стойке. Таким образом, n=6.
Для определения класса кинематических пар составив следующую таблицу:
Номер звена |
Схема |
Название |
Класс/ подвижность |
Вид контакта/замыкание |
0 – 1 |
|
вращательная |
5/1 |
По поверхности(низшая)/ геометрическое |
1 – 2 |
|
зубчатая |
4/2 |
Линия (высшая)/ геометрическое |
0 – 2 |
|
вращательная |
5/1 |
По поверхности(низшая)/ геометрическое |
2 – 3,3’ |
|
зубчатая |
4/2 |
Линия (высшая)/ геометрическое |
3,3’ – 0 |
|
вращательная |
5/1 |
По поверхности(низшая)/ геометрическое |
3,3’ – 4,4’ |
|
зубчатая |
4/2 |
Линия (высшая)/ геометрическое |
4,4’ – Н |
|
вращательная |
5/1 |
По поверхности(низшая)/ геометрическое |
4,4’ – 5 |
|
зубчатая |
4/2 |
Линия (высшая)/ геометрическое |
5 – Н,6 |
|
вращательная |
5/1 |
По поверхности(низшая)/ геометрическое |
Н,6 – 7 |
|
зубчатая |
4/2 |
Линия (высшая)/ геометрическое |
7 – 0 |
|
вращательная |
5/1 |
По поверхности(низшая)/ геометрическое |
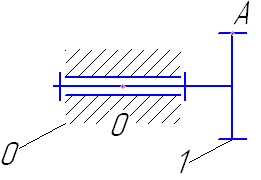

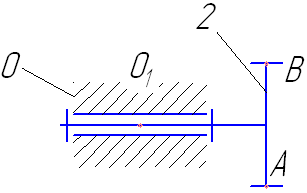


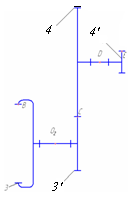

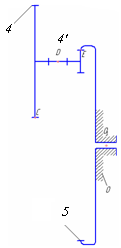
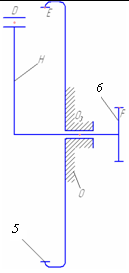
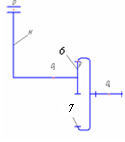
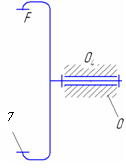
Схема содержит шесть одноподвижных кинематических пар: 0-1; 0-2; H-4,4`; 0-3,3’, Н-5; 0-7. И пять высших двухподвижных кинематических пар: 1-2; 2-3,3’; 3,3’-4,4’; 4,4`-5; H,6-7;
Следовательно, р1=6; р2=5.
Подставив найденные значения в формулу (8.1), получим:
![]() .
.
Полученный результат означает, что для однозначного описания положения всех звеньев механизма в рассматриваемой плоскости достаточно знать одну обобщенную координату.
8.2 Синтез сложного зубчатого механизма
Поскольку данный
сложный зубчатый механизм состоит из
четырёх ступеней (рядов) – планетарной
и трёх простых, то передаточное отношение
![]() следует разбить на произведение четырех
отношений:
следует разбить на произведение четырех
отношений:
![]() .
(8.2)
.
(8.2)
Проверим возможность реализации заданного передаточного отношения:
 .
.
Разложим передаточное число по ступеням (рядам):
![]() .
.
Передаточное отношение первого ряда:
![]() ,
,
тогда
![]() .
.
Из условия отсутствия интерференции:
![]() ,
следовательно,
,
следовательно,
![]() .
.
Передаточное отношение второго ряда:
![]() (8.3)
(8.3)
тогда
![]() .
.
Из условия отсутствия интерференции:
,
следовательно,
![]() .
.
Передаточное отношение третьего ряда:
![]() . (8.4)
. (8.4)
Выразим из (8.3)
![]() :
:
![]() .
.
Представим передаточные числа в виде сомножителей:
![]() .
.
Следовательно:
![]()
Рассмотрим три варианта числа зубьев для каждого колеса:
![]()
Запишем условие
соосности:
![]()
![]() ,
,
где di
– делительный
диаметр колес:
![]() .
.
![]() ,
,
Сократим на m/2 все слагаемые в обеих частях уравнения, получим:
![]() . (8.4)
. (8.4)
Выражение (8.4) отображает условие соосности двухрядного планетарного механизма с одним внешним и одним внутренним зацеплениями.
Выразим условие соосности через сомножители:
![]() ,
,
![]() ,
,
где a=(D-C);
b=(A+B).
Выразим числа зубьев через коэффициенты:
![]() .
.
Произведем расчет чисел зубьев для трех вариантов и занесем все значения в таблицу 7.
Таблица 7 – числа зубьев колес
Вар-т |
A |
B |
C |
D |
a |
b |
Z3 |
Z4 |
Z4’ |
Z5 |
q |
1 |
1 |
2 |
1 |
7 |
6 |
3 |
6 |
12 |
3 |
21 |
1 |
|
42 |
84 |
21 |
147 |
7 |
||||||
2 |
2 |
10 |
5 |
14 |
9 |
12 |
18 |
90 |
60 |
168 |
1 |
|
|
|
|
|
|
||||||
3 |
2 |
7 |
6 |
24 |
24 |
9 |
36 |
126 |
54 |
216 |
1 |
|
|
|
|
|
|
В данной схеме планетарного механизма необходимо обеспечить отсутствие подреза зубьев колес. Для выполнения этого условия необходимо, чтобы число зубьев всех колес было больше или равно семнадцати. Из таблицы 7 видим, что это условие не выполняется в первом варианте, следовательно общий сомножитель q в первом варианте будет равен 7.
Для обеспечения отсутствия контакта сателлитов друг с другом необходимо проверить условие соседства:
![]() ,
,
где k – число сателлитов;
max(z4,4’) – Максимальное число зубьев сателлитов. В данном случае, число зубьев колеса 4` больше, значит в формулу подставляем z4’;
z5 и z4’ – число зубьев солнечного колеса и сателлита соответсвенно.
Рассмотрим условие соседства для всех вариантов:
Вариант 1:
![]() ;
; ![]() .
.
Следовательно, условие соседства для первого варианта выполняется.
Вариант 2:
![]() ;
; ![]() .
.
Следовательно, условие соседства для второго варианта не выполняется.
Вариант 3:
![]() ;
; ![]() .
.
Следовательно, условие соседства для третьего варианта не выполняется.
Условие соседства выполняется для первого варианта, следовательно, в качестве окончательного принимаем вариант1.
![]()
Передаточное отношение четвертого ряда:
![]() ,
,
тогда
![]() .
.
![]() ,
следовательно,
,
следовательно,
![]() .
.
Определим диаметры зубчатых колес механизма.
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
Рассчитаем масштабный коэффициент длин для данной схемы:
![]()
Переведем все диаметры в масштабный коэффициент:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Построим кинематическую схему механизма в найденном масштабном коэффициенте. Расстояние между колесами берем произвольным, поскольку оно не влияет на передаточную функцию механизма.
8.3 Кинематический анализ
Построим план
скоростей для данной схемы сложного
зубчатого механизма. По условию имеем
число оборотов на первом колесе
![]() .
.
Определим угловую скорость на первом колесе:
![]()
Найдем линейную скорость первого колеса:
![]()
Найдем масштабный коэффициент скоростей:
![]() ,
,
где |AA1| - отрезок, изображающий скорость точки А на плане скоростей.
Построим план угловых скоростей методом параллельного переноса годографов с плана скоростей на план угловых скоростей от полюса и до пересечения с осью ω. Расстояния от нуля до найденных точек и есть значения величин угловых скоростей.
![]()
![]()
![]()
![]()
![]()
Определим передаточное число через полученные в ходе кинематического анализа значения угловых скоростей:
![]()
Подсчитаем погрешность:
![]()
Погрешность не более 5%, следовательно расчет СЗМ верен.