

§ 6.3 Симметрирование синусно-косинусных поворотных трансформаторов.
С целью устранения искажающего действия поперечного потока Фq, осуществляют так называемое с и м м е т р и р о в а н и е поворотного трансформатора. Оно может быть первичным и вторичным.
П е р в и ч н о е симметрирование выполняется со стороны статора и заключается в замыкании компенсационной обмотки на какое-то сопротивление или накоротко (рис. 6.4). Условием первичного симметрирования является равенство (симметрия) полных сопротивлений цепи обмотки возбуждения и цепи компенсационной обмотки: Zис+ Zв= Zк + Zкн, где Zис - сопротивление источника. Поскольку Zв= Zк, условие симметрии выливается в равенство Zис= Zкн. Если принять, что внутренне сопротивление мощного источника равно нулю Zис = 0, то и Zкн= 0, т.е. первичное симметрирование сводится к замыканию компенсационной обмотки накоротко.
Сущность первичного симметрирования состоит в том, что поперечный поток Фsq, пульсируя по оси компенсационной обмотки, индуцирует в ней ЭДС и ток, который создает магнитный поток Фк, направленный встречно потоку Фsq (рис.6.4,б). В результате поток Фsqи его искажающее действие в значительной мере уменьшаются.
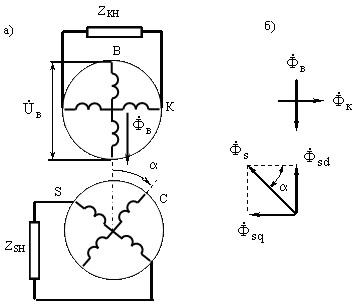
Рис.6.4. К вопросу о первичном симметрировании СКПТ
Достоинством первичного симметрирование является то, что при изменении нагрузки автоматически изменяется величина потока Фк, вследствие чего степень компенсации потока Фsq остается практически постоянной.
Недостатком первичного симметрирования служит зависимость тока возбуждения СКПТ от угла поворота ротора

В т о р и ч н о е симметрирование выполняется со стороны ротора в том случае, когда нагрузка подключается только к одной обмотке, например к синусной. Оно заключается в замыкании второй роторной обмотки на сопротивление Zнс (рис.6.5,а). Его сущность состоит в том, что поперечные составляющие потоков Фsq и Фcq всегда направлены встречно и при правильном выборе Zнс в значительной мере ослабляют друг друга (рис.6.5,б).
При выполнении вторичного симметрирования Fsq= Fcq или
![]()
Выразим токи роторных обмоток через ЭДС и сопротивления

При отсутствии поперечных потоков, учитывая Wsko = Wcko

Из этого уравнения следует, что для осуществления вторичного симметрирования необходимо, чтобы симметрирующее сопротивление Zсн было равно сопротивлению нагрузки Zsн.
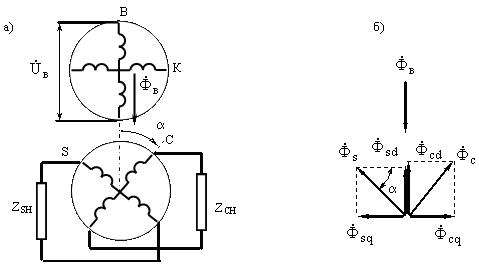
Рис.6.5. К вопросу о вторичном симметрировании СКПТ
Недостаток вторичного симметрирования заключается в том, что оно практически выполнимо только при постоянной нагрузке. Достоинством служит независимость тока возбуждения от угла поворота ротора

Здесь Z2и Z2н - сопротивление роторной обмотки и сопротивление нагрузки, поскольку Zs = Zc и Zsн= Zсн.
На практике, там, где это возможно, выполняют одновременно и первичное и вторичное симметрирование СКПТ (рис.6.6), добиваясь почти полного уничтожения искажающего действия поперечного потока ротора.
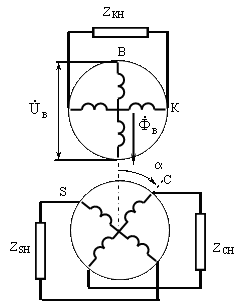
Рис.6.6. Первичное и вторичное симметрирование СКПТ
Лекция 28 § 6.4 Линейный поворотный трансформатор
Известно, что синус малого угла равен самому углу. Поэтому с погрешность 0,1% можно считать, что СКПТ обеспечит линейную зависимость U = ka в диапазоне a = ±4,5о. Если допустить погрешность 1%, диапазон увеличится доa= ±14о. Однако в гораздо более широком интервале углов линейную зависимость U = ka реализует функция
![]()
При k = 0,5 ее можно представить в виде степенного ряда
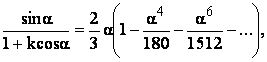
члены которого быстро убывают. С погрешность 1% можно ограничиться только линейным коэффициентом этого ряд в диапазоне углов ±60о.
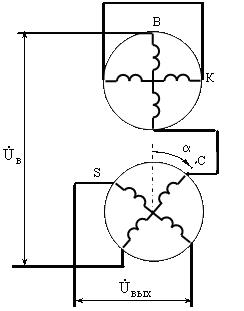
Рис.6.7. Схема ЛПТ с первичным симметрированием
Подбором коэффициента в пределах k = 0,52¸0,56 точность аппроксимации можно довести до 99, 9% в диапазоне углов ±55о.
Наиболее распространенная схема линейного поворотного трансформатора представлена на рис.6.7, из которой видно, что это схема с первичным симметрированием. Следовательно, можно принять Фq = 0 и при анализе процессов в ПТ учитывать только продольный поток Фd.
Если пренебречь внутренним падением напряжения в обмотках

Отсюда
Выходной сигнал

Из последней формулы видно, что при проектировании СКПТ следует коэффициент трансформации выбирать в пределах 0,52¸0,56.