

Лекция 15 электрические микромашины автоматических устройств
![]()
Электрические микромашины автоматических устройств гораздо разнообразнее микромашин общепромышленного применения, что объясняется спецификой выполняемых ими функций. Для них характерно не силовое преобразование энергии, а преобразование одной величины в другую. Например, электрического сигнала в механическое перемещение, углового смещения в напряжение и т.д.
Такие показатели работы, как КПД, cosj, полезная мощность, весьма важные для силовых электрических машин общего применения, здесь оказываются несущественными. Главными являются требования высокой точности работы, хорошего быстродействия, надежности и стабильности характеристик.
Микромашины автоматических устройств можно разделить на следующие группы:
1)исполнительные или управляемые микродвигатели;
2)информационные микромашины;
3)электромашинные усилители;
4)электрические микромашины гироскопических систем.
1. Исполнительные двигатели
И с п о л н и т е л ь н ы м и (управляемыми) двигателяминазываются электромеханические устройства, преобразующие электрический сигнал в механическое вращение вала. Такие двигатели являются очень важными элементами систем автоматики и телемеханики. От качества их работы во многом зависит качество работы всей, порой очень сложной системы.
Главные требования, предъявляемые к исполнительным двигателям:
отсутствие самохода - вращение двигателя при отсутствии сигнала управления;
широкий диапазон регулирования частоты вращения;
устойчивость работы во всем диапазоне угловых скоростей;
высокое быстродействие;
максимальная линейность механических и регулировочных характеристик;
Особенность исполнительных двигателей заключается в том, что они практически никогда не работают в установившимcя режиме. Для них характерны частые пуски, реверсы, остановы и другие переходные режимы. В конструктивном отношении это закрытые машины, в большинстве случаев без вентилятора. Последний не нужен по причине малой эффективности в переходных режимах и нежелания увеличивать момент инерции.
В зависимости от питающего напряжения исполнительные двигатели подразделяются на три группы:
1) асинхронные исполнительные двигатели;
2) исполнительные двигатели постоянного тока;
3) шаговые двигатели.
Почти все исполнительные двигатели (за малым исключением) имеют две обмотки. На одну из них - обмотку возбуждения (ОВ), напряжение подается постоянно, на другую - обмотку управления (ОУ), напряжение подается лишь на время отработки перемещения.
Асинхронные исполнительные двигатели § 1.1. Общие сведения
Асинхронные исполнительные двигатели это двухфазные двигатели с двумя обмотками на статоре, сдвинутыми в пространстве на 90 электрических градусов (рис.1.1). Для того чтобы обмотки создавали вращающееся магнитное поле, необходим временной сдвиг токов в этих обмотках. В зависимости от способа сдвига токов различают три способа управления исполнительными двигателями: амплитудный (рис.1.1,а); фазовый (рис.1.1,б) и амплитудно-фазовый (рис.1.1,в).
П р и а м п л и т у д н о м управлении на обмотку возбуждения подается напряжение Uв, а на обмотку управления - напряжение Uу, переменное по амплитуде и сдвинутое по фазе относительно него на 90о. Управление двигателем осуществляется изменением величины напряжения Uу. Отношение напряжения управления Uу к напряжению возбуждения U’в, приведенному к числу витков обмотки управления, называют эффективным коэффициентом сигнала
где k = wв/wу - коэффициент трансформации; wв и wу - эффективные числа витков обмоток возбуждения и управления; a = Uу/Uв– коэффициент сигнала.
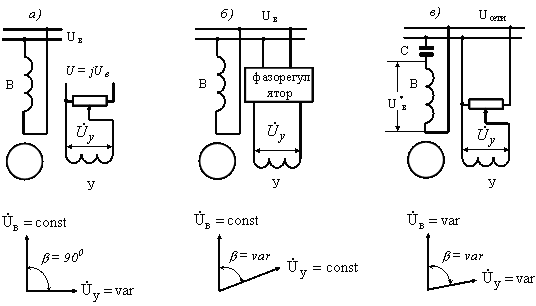
Рис.1.1. Способы управления асинхронным исполнительным двигателем
Круговое магнитное поле и максимальная частота вращения имеют место только при aэ= 1. При aэ < 1 - поле эллиптическое, а частота вращения меньше максимальной. При aэ = 0 - поле пульсирующее; двигатель не вращается. Реверс двигателя осуществляется за счет изменения фазы напряжения управления.
П р и ф а з о в о м управлении на обмотку возбуждения подается напряжение сети Uв, а на обмотку управления - постоянное по амплитуде напряжение, величина которого равна приведенному напряжению возбуждения Uу = U’в, (U’в= Uв/k). Регулирование частоты вращения осуществляется изменением фазы напряжения управления. За коэффициент сигнала здесь принимается sinb. И вновь: при sinb = 1 поле круговое, частота вращения максимальная; при sinb < 1 поле эллиптическое, частота вращения меньше максимальной. При sinb = 0 поле пульсирует, частота вращения равна нулю. При sinb < 0 двигатель изменяет направление вращения.
А м п л и т у д н о - ф а з о в о е управление чаще всего реализуется как конденсаторное. На первый взгляд этот способ кажется амплитудным, однако, это не так. Дело в том, что при изменении амплитуды напряжения управления Uу, изменяется частота вращения двигателя n, изменяется ток возбуждения Iв, а поскольку напряжение на обмотке возбуждения U*вравно разности напряжения сети Uс и падения напряжения на конденсаторе Iвxк, то оно изменяется как по величине, так и по фазе
![]()
Коэффициентом сигнала ae здесь принято называть отношение напряжения управления Uу к напряжению сети Uс: ae = Uу/Uс.
Известно, что характеристики конденсаторного двигателя во многом зависят от того, как выбраны соотношения напряжений на обмотках и емкость конденсатора. Обычно их выбирают из условия получения кругового магнитного поля при пуске двигателя.Коэффициент сигнала, обеспечивающий это условие, обозначают aeo. Поэтому при aeo поле круговое, при ae < aeo - эллиптическое, при ae = 0 - пульсирующее.
Анализируя сказанное выше, можно сделать вывод, что несмотря на конструктивные различия способов управления асинхронным исполнительным двигателем, их объединяет общая идея управления: деформация магнитного поля от кругового к эллиптическому до пульсирующего.
Для обеспечения устойчивой работы двигателя во всем диапазоне частот вращения, для расширения зоны регулирования и, как узнаем из дальнейшего, для устранения самохода, асинхронные исполнительные двигатели изготавливают с роторами, имеющими большие активные сопротивления (рис.1.2). В результате их критические скольжения всегда больше единицы (кривая 1). У обычных машин sк = 0,1¸ 0,5 (крива 2).
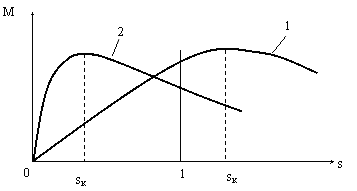
Рис.1.2. Механические характеристики исполнительных (1) и силовых (2) асинхронных двигателей
Большие сопротивления ротора приводят к увеличению потерь и снижению механической мощности. Поэтому асинхронные исполнительные двигатели имеют полезную мощность в 2 ¸3 раза меньшую, чем силовые двигатели такого же габарита.