

2.1.4. Основные свойства сетей Петри
Исходя из практических задач моделирования, можно установить ряд свойств сетей Петри, характеризующих поведение моделируемых систем.
Свойство ограниченности. Позиция рi в сети Р N = {Θ, Р, Т, F, Мо} называется ограниченной, если для любой Достижимой в сети маркировки М существует такое k, что μi ≤ k. Сеть PN называется ограниченной, если все ее позиции ограничены. Сеть, показанная на рисунке 2.1 не ограничена, т.к. возможен неограниченный рост μ2. Для обозначения неогравичешюй маркировки используется специальный символ ω. Так, на дереве маркировок (рис. 2.2) можно выделить маркировку М = [1,ω,0].
запусков
переходов,
R(PN,
М) для

Свойство безопасности. Сеть PN называется безопасной, если при любой достижимой маркировке μi ≤ 1 для всех i = 1,...,n. Таким образом, в безопасной сети вектор маркировок состоит только из нулей и единиц (является двоичным словом).
Свойство консервативности. Сеть называется консервативной, если сумма фишек во всех позициях остается постоянной при работе сети
n
∑ μi(θ)=const,θ = 0,1,…
i=1
Свойство живости. Рассмотрим теперь свойства переходов. Переход tj в сети PN={Θ,P,T,F,M0} называется потенциально живым, если существует достижимая из Мо маркировка М', при которой tj может сработать. Если tj является потенциально живым при любой достижимой в PN маркировке, то он называется живым. Переход tj, не являющийся потенциально живым при начальной маркировке М0, называется мертвым при этой маркировке. Маркировка Мо в этом случае называется tj - тупиковой. Если маркировка является tj - тупиковой для всех j = l,.,.,m, то она называется тупиковой. При тупиковой маркировке не может сработать ни один переход. На дереве маркировок тупиковая маркировка является листом.
Переход называется устойчивым, если никакой другой переход не может лишить его возможности сработать при наличии для этого необходимых условий.
Последовательность маркировок М0,М1,...,М р , в которой М k+1=δ{Мк), k = 0,1,...,р образует цикл, если M0 = Mp . Каждому цисклу соответствует последовательность слов свободного языка сети Петри.
2.1.5. Некоторые обобщения сетей Петри
Расмотренное в пп. 2.1.1.-2.1.3. базовое определение сети Петри позволяют моделировать широкий класс дискретных систем. Однако в ряде случаев этих возможностей оказывается недостаточно, поэтому вводят обобщения этих сетей, которые обладают расширенными возможностями моделирования. Упомянем некоторые из них.
Ингибиторные сети (ИСП, IPN) – это сети Петри, для которых функция инцидентности имеет вид F = FP U Ft U FI, т.е. она дополнена специальной функцией инцидентности FI : P x T -> {0,1}, которая вводит ингибиторные дуги для тех пар (pi,tj), для которых fiIj = 1. Ингибиторные дуги на рисунках заканчиваются не стрелками, а кружочками (рис. 2.3). Кратность этих дуг всегда равна 1.

p1
t
p3
p2
Рис. 2.3
Правила срабатывания переходов в ингибиторной сети модифицируются следующим образом. Переход tj сработать при маркировке М, если для всех связанных с ним позиций pi и pk
(μi ≥ f i pj)^(μk * fkIj = 0),
т.е. по сравнению с условием (2.6) введено дополнительное условие: позиция pk , соединенная с переходом tj ингибиторной дугой, не должна содержать фишек (должна иметь нулевую маркировку). Так, переход t на рисунке 2.3 может срабатывать только при μ1 > 0 и μ2 = 0.
Сети с приоритетами. При определении сети Петри отмечалась недетерминированность ее работы: если имеется возможность срабатывания нескольких переходов, то срабатывает любой из них. При моделировании реальных систем могут сложиться ситуации, когда последовательность срабатываний необходимо регламентировать. Это можно сделать, введя множество приоритетов PR : Т —>{0,1,…} и приписав каждому из переходов tj соответствующее целочисленное значение приоритета prj . Тогда правило срабатывания переходов модифицируется: если на некотором такте работы сети PN имеется возможность для срабатывания нескольких переходов, то срабатывает тот из них, который имеет наивысший приоритет. Так, из двух готовых к срабатыванию переходов t1 и t2 . на рисунке 2.4 а первым должен сработать переход t2, имеющий приоритет pr2=1, поскольку приоритет перехода t1 pr1 = 2, т.е. ниже.
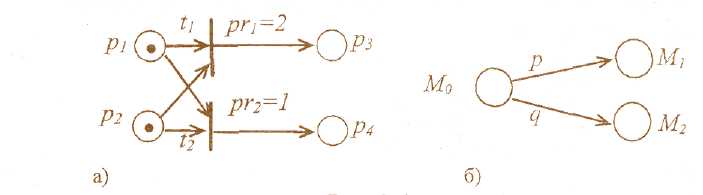
Рис. 2.4
Сети со случайными срабатываниями переходов. В описанной выше ситуации, когда имеется возможность срабатывания нескольких переходов ti,tj,…ts, их приоритет можно задавать вероятностями срабатывания каждого их переходов pi,pj,…ps, причем pi+pj+…+ ps=1. Тогда исходная маркировка Мо приведет на следующих шагах работы сети к набору маркировок Мi,Мj,…Мs, каждая из которых будет помечена соответствующей вероятностью. Отождествив маркировки с состоянием сети и положив, что вероятности не зависят от работы сети в предыдущие такты, мы получим цепь Маркова, описывающию вероятностное поведение системы (см. Главу 3).
Пусть на рисунке 2.4 а вероятность срабатывания перехода t1 равна p, а вероятность срабатывания t2 равна q = 1 – p. Тогда, обозначив маркировки М0 = [1100], М1 = [0010], М2 = [0001], получим цепь Маркова (рис. 2.4 б).

Рис. 2.5
Иерархическис сети Петри представляют собой многоуровневые структуры, в которых выделяются сети различного уровня. Они позволяют моделировать различные многоуровневые (иерархические) системы.
В отличие от обыкновенных сетей Петри, в иерархических сетях имеются два типа переходов: простые и составные. Простые переходы ничем не отличаются от рассмотренных ранее, а составные переходы содержат внутри себя сеть Петри более низкого уровня. Формально они состоят из входного («головного») и выходного («хвостового») переходов, между ними находится некоторая сеть Петри, которая, в свою очередь, также может быть иерархической.
Пример иерархической сети N, в которой имеется составной переход t2, содержащий внутри себя сеть N", показан на рисунке 2.5. Составной переход t2 имеет «голову» t'2 и «хвост» t"2, между которыми заключена сеть N', состоящая из позиций p21 – p25 и переходов t21 – t23.
Иерархическая сеть функционирует, как и обыкновенная соответствует вызову подпрограммы, а срабатывание t СП, переходя от одной маркировки к другой и обмениваясь возврату в основную программу, фишками (в том числе между сетями различного уровня). Исключение составляют правила работы составных переходов.
Срабатывание составных переходов является не мгновенным событием, как в обыкновенных СП, а составным действием. Поэтому говорят не о срабатывании составного перехода, а о его работе. На каждом шаге дискретного времени 0 составной переход может находиться в одном из двух состояний - пассивном и активном. Начальное состояние всея переходов - пассивное. Составной переход может быть активирован в момент времени 9, если он до этого был пассивен и имеются условия для срабатывания его головного перехода, задаваемые выражением (2.6). При этом производится изменение маркировки в сети верхнего уровня по обычным правилам (2.7) и одновременно запускается работа в сети, находящейся внутри составного перехода. Во время ее работы функционирование сети верхнего уровня блокируется. Сеть нижнего уровня работает с учетом своей начальной маркировки до тез пор, пока все ее переходы не станут пассивными (т.е. не смогут сработать). После этого происходит срабатывание хвостового перехода и изменение маркировки сети верхнего уровня согласно (2.7). Составной переход возвращается в пассивное состояние, а в сети нижнего уровня восстанавливается начальная маркировка.
Ниже приведено дерево маркировок сетей N и N' при указанных на рисунке 2.5 начальная маркировка.
Мы видим, что на шаге θ = 2 происходит составного перехода t2 и сети N' в следующем порядке: срабатывание t'2 -> запуск N' -> окончание работы N' и восстановление ее начальной маркировки -> срабатывание t2 и продолжение работы сети N.
Отметим также, что описанный процесс напоминает выполнение подпрограммы при программировании на алгоритмических языках. Срабатывание перехода t’2 и соответствует вызову подпрограммы, а срабатывание t”2 – возврату в основную программу.

Р аскрашенные
(цветные) сети Петри
(РСП, CPN
– Coloured
Petri
Net).
В ряде приложений перемещаемые в сети
Петри ресурсы (фишки) требуется
дифференцировать, и тогда приходится
вводить фишки различных видов (например,
разных цветов). В этом случае для каждого
перехода необходимо указывать, при
каких комбинациях фишек во входных
позициях он может сработать и какое
количество фишек различных цветов
помещается в выходные позиции.
аскрашенные
(цветные) сети Петри
(РСП, CPN
– Coloured
Petri
Net).
В ряде приложений перемещаемые в сети
Петри ресурсы (фишки) требуется
дифференцировать, и тогда приходится
вводить фишки различных видов (например,
разных цветов). В этом случае для каждого
перехода необходимо указывать, при
каких комбинациях фишек во входных
позициях он может сработать и какое
количество фишек различных цветов
помещается в выходные позиции.
Понятно, что моделирующая возможность раскрашенных сетей Петри выше, чем у обычных, однако при этом значительно усложняется их описание.
Формальное определение и подробное описание работы раскрашенных сетей Петри приведено в п. 2.2
Следует отметить, что раскрашенные сети Петри могут быть преобразованы в обычные, но при этом возрастают размеры сети.
Упомянем еще некоторые расширения сетей Петри: синхронные самомодифицируемые (с изменяющейся кратностью дуг, когда Fp и Ft зависят от τ), и другие, описанные в литературе [8], [9], [17] - [25].