

Математическая модель системы управления
Уравнения звеньев системы управления
Исполнительный двигатель
Исходное уравнение ИД:
 .
.
Уравнение ИД после подстановки значений параметров:
![]() .
.
Передаточная функция (ПФ) ИД:
 ,
,
![]() .
.
Редуктор
Исходное уравнение редуктора :
![]()
Уравнение редуктора после подстановки значений параметров:
![]()
ПФ ИД:
 ,
,
![]() .
.
Управляемый тиристорный преобразователь
Исходное уравнение УТП:
 .
.
Уравнение УТП после подстановки значений параметров:
![]() .
.
ПФ УТП:

![]()
Усилитель
Исходное уравнение усилителя:
![]() .
.
Значение коэффициента передачи усилителя находим из уравнения:
 ,
,
ky = 2000.
Уравнение усилителя после подстановки значений параметров
![]() .
.
ПФ усилителя:
![]() .
.
Обратная связь
ПФ обратной связи:
![]()
Структурная схема исходной системы с конкретными передаточными функциями звеньев
Структурная схема исходной системы с конкретными ПФ звеньев приведена на рисунке 3.

Рисунок 3.
Структурная схема исходной системы с ПФ звеньев.
Анализ устойчивости и качества переходных процессов
Распределение нулей и полюсов замкнутой системы
Нули у ПФ отсутствуют.
Полюсы ПФ: p1 = 46.175806 +105.887631j
p2 = 46.175806 -105.887631j
p3 = -217.868732 +117.158601j
p4 = -217.868732 -117.158601j
p5 = -624.735646 +1082.458079j
p6 = -624.735646 -1082.458079j
На рисунке 4 приведено расположение полюсов системы на комплексной плоскости.
Р исунок
4.
исунок
4.
Распределение полюсов замкнутой системы.
Реакция системы на единичное ступенчатое воздействие
На
рисунке 5 приведен график переходного
процесса на единичное ступенчатое
воздействие. Как видно из графика,
система является неустойчивой и для её
стабилизации необходимо введение
корректирующего звена. 
Рисунок 5.
График переходного процесса на единичное ступенчатое воздействие.
Частотные характеристики системы
Н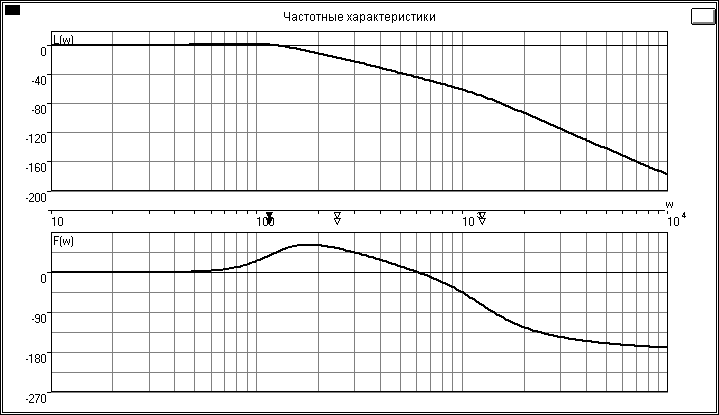 а
рисунках 6 и 7 приведены логарифмические
амплитудно-частотная и фазовая
характеристики (ЛАЧХ и ФЧХ) замкнутой
и разомкнутой систем соответственно.
а
рисунках 6 и 7 приведены логарифмические
амплитудно-частотная и фазовая
характеристики (ЛАЧХ и ФЧХ) замкнутой
и разомкнутой систем соответственно.
Рисунок 6.
ЛАЧХ и ФЧХ замкнутой системы
Р исунок
7.
исунок
7.
ЛАЧХ и ФЧХ разомкнутой системы.
Коррекция системы
Как было установлено в предыдущем разделе, исходная система является неустойчивой. Для её стабилизации необходимо введение корректирующего звена. Введем в систему расположенное последовательно корректирующее звено.
Для того чтобы система стала устойчивой необходимо добиться, чтобы наклон ЛАЧХ в районе частоты среза был меньше 40дБ/дек. На рисунке 8 показан график асимптотической ЛАЧХ. Для того чтобы сделать наклон ЛАЧХ системы на частоте среза меньше 40 дБ/дек, необходимо ввести корректирующее звено, ЛАЧХ которого имеет вид близкий к изображенному на рисунке 9. После введения такого звена график ЛАЧХ системы будет схож с графиком, изображенным на рисунке 10. ЛАЧХ системы рисунка 10 имеет наклон на частоте среза равный 20 дБ/дек, следовательно, эта система устойчива.

Рисунок 8.
Асимптотическая ЛАЧХ разомкнутой системы.

Рисунок 9.
Асимптотическая ЛАЧХ искомого звена коррекции.
Р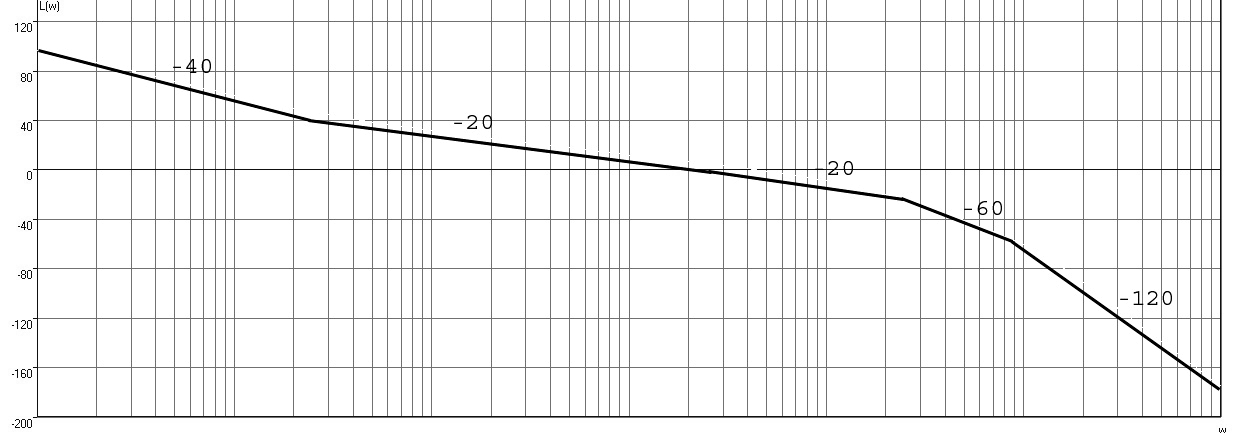 исунок
10.
исунок
10.
Асимптотический вид ЛАЧХ искомой после введения звена коррекции
Звено коррекции с ПФ
![]()
отвечает асимптотической форме искомого звена коррекции и имеет график ЛАЧХ, изображенный на рисунке 11.

Рисунок 11.
ЛАЧХ полученного звена коррекции.
График ЛАЧХ разомкнутой системы после введения звена коррекции приведен на рисунке 12. ЛАЧХ скорректированной разомкнутой системы имеет следующие характеристики:
Частота среза: 37.4416 рад/c
Запас по фазе: 64.5494 *
Запас по амплитуде: 12.5883 дБ
Р исунок
12.
исунок
12.
ЛАЧХ разомкнутой системы после введения звена коррекции.
Н а
рисунке 13 приведена структурная схема
системы с включенным звеном коррекции.
а
рисунке 13 приведена структурная схема
системы с включенным звеном коррекции.
Рисунок 13.
Структурная схема система с включенным звеном коррекции.
ЛАЧХ и ФЧХ замкнутой системы после введения звена коррекции приведены на рисунке 14.
Р исунок
14.
исунок
14.
Графики ЛАЧХ и ФЧХ замкнутой системы после введения звена коррекции.
Нули ПФ скорректированной системы: z1 = -1.319549
z2 = -25.186027
Полюсы ПФ скорректированной системы: p1 = -20.158679
p2 = -1.375573
p3 = -41.700908 +60.317460j
p4 = -41.700908 -60.317460j
p5 = -233.056621
p6 = -690.949059
p7 = -65.484187 +391.111531j
p8 = -65.484187 -391.111531j
На рисунке 15 показано расположение нулей и полюсов на комплексной плоскости. На рисунке 16 приведен график переходного процесса скорректированной системы.
Р исунок
15.
исунок
15.
Р аспределение
нулей и полюсов скорректированной
системы.
аспределение
нулей и полюсов скорректированной
системы.
Рисунок 16.
График переходного процесса скорректированной системы.
Параметры переходного процесса в откорректированной системе:
Установившееся значение: 1.0000 В
Время регулирования: 0.0470 с
Перерегулирование: 3.70%