Содержание
Техническое задание……………………………………………………………………………2
Введение…………………………………………………………………………………………4
Цифровая следящая система робота-манипулятора…………….………………………....5
Математическая модель системы управления…………………………………………..…7
Уравнения звеньев системы управления……………………………………………7
Структурная схема исходной системы с конкретными передаточными
функциями звеньев………………………………………………………………….…9
Анализ устойчивости и качества переходных процессов………………….. …….……...10
Распределение нулей и полюсов замкнутой системы……………………….…….10
Реакция системы на единичное ступенчатое воздействие………………………..11
Частотные характеристики системы…………………………………………..……11
Коррекция системы………………………………………………………………………….13
Анализ чувствительности скорректированной системы…………………………………19
Анализ нелинейной системы………………………………………………………………..20
Заключение…………………….…………………………………………………………..……22
Список литературы………………………………………………………………..……………23
Введение
Цель курсовой работы- приобретение практических навыков расчета и моделирования систем автоматического управления (САУ). В качестве примера рассматривается цифровая следящая система управления роботом-манипулятором.
При выполнении работы необходимо решить следующие задачи:
Получить математическое описание каждого звена системы, построить асимптотические и точные частотные характеристики;
Построить принципиальную структурную схему системы, определить роль каждого элемента;
Установить основные параметры системы, такие как качество переходных процессов и ЧХ;
Разработать и ввести в систему звено коррекции;
Произвести анализ чувствительности скорректированной системы;
Определить характеристики системы с нелинейным элементом.
Цифровая следящая система робота-манипулятора
На рисунке 1 представлена принципиальная схема цифровой следящей системы робота-манипулятора.
Р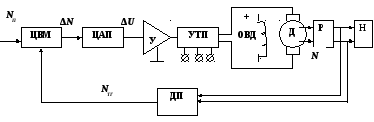 исунок
1.
исунок
1.
Принципиальная схема цифровой следящей системы.
Обозначения, использованные на рисунке 1:
ЦВМ – цифровая управляющая машина;
Nп – программа перемещения руки робота, заложенная в ЦВМ;
Nдп – цифровой сигнал датчика положения (ДП), являющегося преобразователем перемещения в код;
![]() - цифровой сигнал ошибки слежения;
- цифровой сигнал ошибки слежения;
ЦАП – цифроаналоговый преобразователь;
У – усилитель сигнала ошибки;
УТП – управляемый тиристорный преобразователь, питающий якорь исполнительного двигателя (ИД);
ОВД – обмотка возбуждения ИД;
Р – редуктор, связывающий вал двигателя с нагрузкой (Н) – рукой робота;
![]() - угол поворота руки робота.
- угол поворота руки робота.
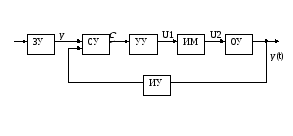
При сравнении принципиальной схемы цифровой следящей системы с типовой структурой системы управления с обратной связью, изображенной на рисунке 2, можно сделать выводы о функциональной роли каждого элемента схемы рисунка 1:
ЦВМ выполняет роль задающего устройства (ЗУ) и сравнивающего устройства (СУ);
ЦАП + У
+ УТП в данном контексте являются
устройством управления (УУ). ЦАП
преобразует цифровой сигнал ошибки
слежения от ЦВМ в напряжение
![]() ,
которое затем усиливается У и через УТП
подается на якорь ИД;
,
которое затем усиливается У и через УТП
подается на якорь ИД;
ИД+Р выполняют роль исполнительного механизма (ИМ)
ДП выполняет роль измерительного устройства (ИУ). Он определяет значение действительного угла поворота (выход системы управления – y(t) на рисунке 2), преобразует его в цифровой вид и передает полученный код на ЦВМ.
Рисунок 2.
Типовая структура системы управления
с обратной связью.