

8.1. Введение системы в simulink

Рис. 17. Система в SIMULINK
8.2.Моделирование системы в simulink

Рис. 18. График переходной функции на единичное воздействие
Из графика видно, что переходный процесс в SIMULINKидентичен
переходному процессу в CLASSIC.
8.3.Расчёт периодов квантования.
Выбор периода квантования Т обычно осуществляется из соображений теоретической возможности восстановления исходного сигнала по импульсной последовательности
Возьмём max=1000 рад/с
>2мах, где > 2000 рад/с
Отсюда получаем
что период квантования равен T0<![]() =0,003
с
=0,003
с
Рассчитав значение периода квантования, нам осталось перевести нашу непрерывную систему в цифровую. Для получения цифровой системы используем программу Simulink. В непрерывную модель системы на место нашего непрерывного корректирующего звена поставим цифровой аналог этого звена, который также будет совмещать в себе функции ЦАП и АЦП.
8.4.Расчёт пф для двух периодов квантования.
Для нахождения ПФ цифрового звена используем MATLAB :
t0 = 0.002
num1=[0.08 1.62 1]
den1=[0.0661 126 1]
[numd1 , dend1] = c2dm(num1 , den1 , t0 ,'tustin')
При Т = 0.002
ПФ цифрового звена равна:
W(z)=![]()
Для нахождения ПФ цифрового звена используем MATLAB :
t0 = 0.02
num1=[0.08 1.62 1]
den1=[0.0661 126 1]
[numd1 , dend1] = c2dm(num1 , den1 , t0 ,'tustin')
При Т = 0.001
ПФ цифрового звена равна:
W(z)=![]()
8.5.Графики переходных процессов на выходе.

Рис. 19. Схема с дискретным корректирующим звеном(в подсистеме)

Рис. 20. Подсистема
1) Для Т = 0.002
W(z)=
![]()
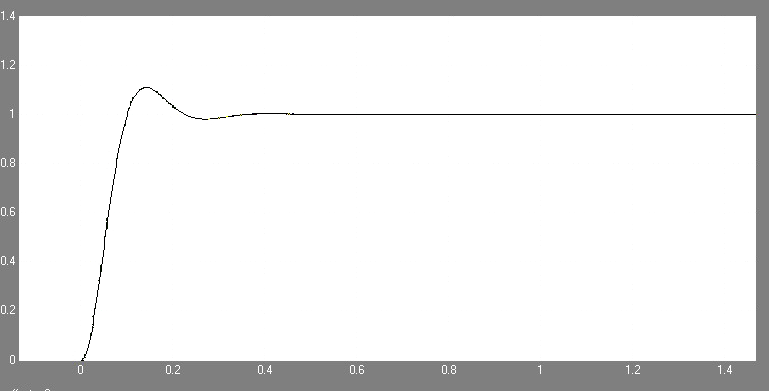
Рис. 21. Цифровая Система 1 в SIMULINK
2) Для Т = 0.02
W(z)=
![]()

Рис. 22. Цифровая Система 2 в SIMULINK
Сравнение показателей качества непрерывной и двух дискретных систем.
Непрерывная система в Simulink даёт сходные результаты с аналогичной системой в Classic. В результате анализа цифровых систем с временем дискретизации 0.002 с. и 0.02 с. можно сделать выводы, что цифровая реализация с Т1 = 0.02 с. незначительно ухудшает перерегулирование, а с Т2 = 0.002 с. практически повторяет непрерывную систему. При Т =0.003 получаем лучшее перерегулирование 17%.
|
Показатель |
Непрерывная |
1 Цифровая(Т = 0.002) |
2 Цифровая(Т =0.02) |
|
Время регулирования |
0.21 с |
0.20 |
0.20 |
|
Перерегулирование |
15 % |
15% |
20% |
Анализ нелинейной системы.
9.1. Ввод нелинейного элемента
При физической реализации нашей системы в ней появится нелинейности, поэтому проведем исследование как нелинейности в двигателе(люфт) повлияют на нашу систему.
Вставим нелинейность Backslash;
Назначение: Моделирует нелинейность типа “люфт”.
Параметры:
Deaband width– Ширина люфта.
Initial output– Начальное значение выходного сигнала.
Сигнал на выходе будет равен заданному значению Initial output, пока входной сигнал при возрастании не достигнет значения U+ (Deaband width)/2 (где U – входной сигнал), после чего выходной сигнал будет равен U-(Deaband width)/2. После того как, произойдет смена направления изменения входного сигнала, он будет оставаться неизменным, пока входной сигнал не изменится на величину (Deaband width)/2, после чего выходной сигнал будет равен U+(Deaband width)/2.


Рис. 23. Ввод нелинейного элемента в SIMULINK
1) Возьмём Ширина люфта = 1(Deaband width)
Начальное значение выходного сигнала = 0.5(Initial output)

Рис. 24 Входное воздействие до нелинейного элемента.
Переходный процесс
С нелинейным
элементом
Переходный процесс
без нелинейного
элемента
Рис. 25 График
переходной функции при нелинейном
элементе со значением
Начального значения
выходного сигнала = 0.5 и ширина люфта
=1
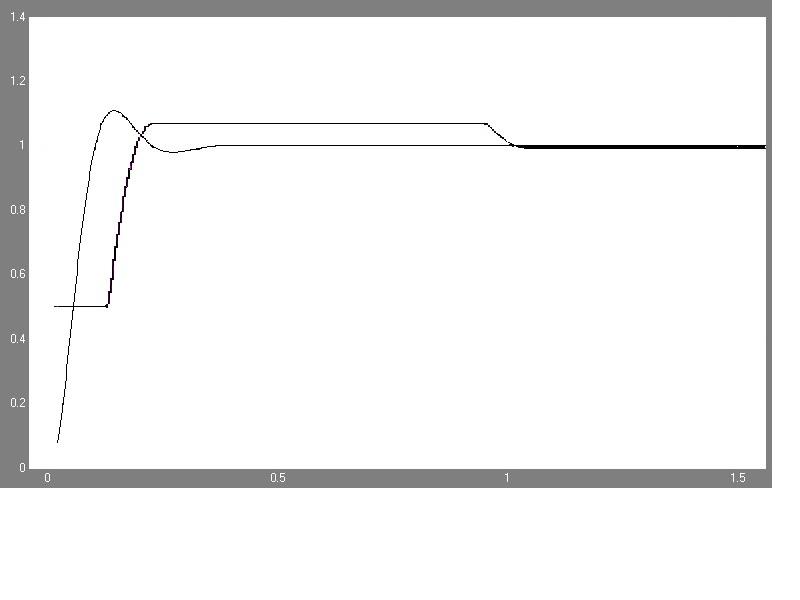


Из графика видно, что выходной сигнал будет неизменен(0.5), пока входное значение не станет равным 1, т.е. ширине люфта. Затем по мере роста входного сигнала до (Начальное значения+0.5Ширины люфта) будет расти и выходное значение. Затем по мере ослабления входного сигнала(до Ширина люфта /2 =0.5) величина выходного сигнала не будет меняться. После чего значение выходного сигнала достигнет 1 а потом не будет меняться. Это совпадает с описанием работы данного нелинейного элемента.
Заключение.
В результате курсового проектирования решены поставленные задачи.
Система имеет следующие показатели качества :
Для системы с последовательной коррекцией :
время регулирования 0.21 с
перерегулирование 15 % Эти показатели качества получены в непрерывной системе с ПФ :
Для системы с последовательной коррекцией :
![]()
Для цифровой реализации выбран период квантования Т0< 0.003 c.
Дискретная ПФ последовательного корректирующего устройства
W(z)=
![]() (T=0.002c)
(T=0.002c)
Список литературы.
1. Имаев Д.Х. " Анализ и синтез систем управления с применением программы Classic для ПЭВМ " С-Пб. Электротехнический Университет 1992 г.
2. Мирошник И.В.”Теория автоматического управления”С-Пб. ”Питер” 2005
3. Нетушил А.В. “Теория автоматического управления”М.Высшая школа 1983