

Математическая модель системы управления двигателя.
3

![]()
Рис. 2. ЛАЧХ и ФЧХ интегратора
3.2. Передаточная функция усилителя:
![]()
![]()
ЛАЧХ
ФЧХ


Рис. 3. ЛАЧХ и ФЧХ усилителя
3.3. Передаточная функция управляемого тиристорного преобразователя:
![]()
ЛАЧХ
ФЧХ


Рис. 4. ЛАЧХ и ФЧХ управляемого тиристорного преобразователя
3.4. Передаточная функция управляемого двигателя:

![]()
ЛАЧХ
ФЧХ


Рис. 5. ЛАЧХ и ФЧХ управляемого двигателя
3.5. Передаточная функция тахогенератора:
![]()
![]()
ЛАЧХ
ФЧХ


Рис. 6. ЛАЧХ и ФЧХ тахогенератора
Заменим обозначения для элементов системы, введенные на рис.1 на их передаточные функции соответственно см. рис.2

Рис. 7. Структурная схема
Обеспечение условий селективной инвариантности.
Система астатическая, из этого следует что мы имеем на нулевой частоте нулевую ошибку.
Анализ устойчивости и качества переходных процессов.
5.1. Распределение полюсов и нулей замкнутой системы
Передаточная функция замкнутой системы
![]()
Полюсы: -319.8; -142.4; 39.5+i*81.7; 39.5-i*81.7

Рис. 8. Распределение полюсов и нулей замкнутой системы
5.2. График переходного процесса на единичное ступенчатое воздействие в замкнутой системе:

Рис. 9. График переходного процесса на единичное ступенчатое воздействие
График амплитудно-фазовой характеристики замкнутой системы:

Рис. 10. График амплитудно-фазовой характеристики замкнутой системы
5.4. График логарифмических характеристик разомкнутой системы:
ЛАЧХ
ФЧХ


Рис. 11. График логарифмических характеристик разомкнутой системы
5.5. Выводы об устойчивости:
Произведя анализ можно прийти к выводу, что наша система неустойчива:
1) Во-первых, Подобный вывод можно сделать по критерию Найквиста в районе частоты среза ЛЧХ разомкнутой системы, ФЧХ разомкнутой системы превышает -180и равна -258(см. рис. 11)
2) Во-вторых, часть корней ПФ лежит справа от оси мнимых чисел.( см. рис. 8)
5.6. Вывод о необходимости коррекции:
Основываясь на том, что наша система оказалась неустойчива можно сделать вывод о необходимости коррекции системы с целью сделать систему устойчивой.
Коррекция системы.
6.1. Структурная схема с включённым звеном коррекции.
Коррекцию системы можно сделать добавив в нашу систему корректирующее звено. Такое звено можно включить в систему двумя способами: последовательно и в виде местной обратной связи. Мы проведем коррекцию первым способом, а также сравним какой из способов наилучший. На рис.7. приведена структурная схема нашей системы с включенным в нее звеном коррекции.

Рис. 12. Структурная схема с включённым звеном коррекции
6.2. Графики желаемой ЛАЧХ с найденными параметрами и ЛАЧХ звена коррекции.
Для получения желаемой нам системы воспользуемся программой Classic и ее режимом “Частотный синтез”. В режиме “Частотный синтез” нашей задачей
Для получения скорректированного звена вставим в нашу систему дополнительный блок,
ЛАЧХ
корректирующего
звена
ЛАЧХ системы
ФЧХ
системы



Рис. 13. Графики желаемой ЛАЧХ с найденными параметрами и ЛАЧХ звена коррекции
6.3. Передаточная функция звена коррекции.
Передаточная функция будет равна

Наша скорректированная система станет следующей
 Рис.
14. Введение звена коррекции
Рис.
14. Введение звена коррекции
Получили, что
![]()
6.4. Распределение нулей и полюсов и график переходного процесса скорректированной системы.
![]()
![]()
Нули:
S1 = -0.64
S2 = -19.05
Полюсы:
S1 = -0.67
S2 = -17.8
S3 = -14.35 - 23.45i
S4 = -14.35 + 23.45i
S5 = -1905
S6 = -336.2

Рис. 15. Нули и полюсы
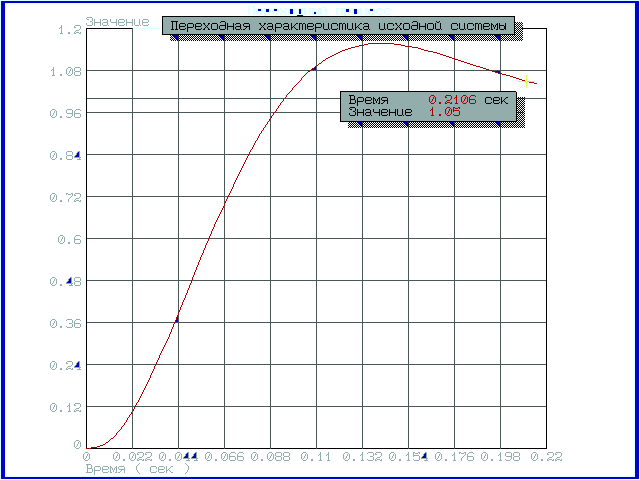
Рис. 16. Переходный процесс.
6.5. Показатели качества.
Ниже приведены некоторые параметры и показатели полученных скорректированных систем.
Система с последовательной коррекцией:
|
Время регулирования |
0.21 с |
|
Перерегулирование |
15 % |
|
Частота среза |
19.9 рад/с |
|
Запас по фазе |
54 |
|
Запас по амплитуде |
21 дб |
По графику переходного процесса получилось, что система стала устойчивой (процесс затухающий) с хорошим значением перерегулирования(15%), а также с малым временем регулирования(0.21 c).
Анализ чувствительности скорректированной системы.
Чувствительность характеризует влияние малых вариаций операторов звеньев на свойства системы.
В данном пункте значения Кд, Тэм, Ку будут изменяться на 20% и 50% от расчетных, в результате чего будет оценена чувствительность системы.
|
Кд |
Трег(с) |
Перерегулирование(%) |
Wср(рад/с) |
Запас по амплитуде(дБ) |
Запас по фазе(◦) |
|
1.2 |
0.21 |
15 |
20 |
21 |
54 |
|
1.44 |
0.19 |
21.6 |
22 |
17.5 |
47 |
|
1.8 |
0.16 |
25.5 |
27 |
19 |
43 |
|
0.96 |
0.25 |
11 |
16.6 |
23 |
59 |
|
0.6 |
0.4 |
5.6 |
11 |
27 |
67 |
|
Тэм |
Трег(с) |
Перерегулирование(%) |
Wср(рад/с) |
Запас по амплитуде(дБ) |
Запас по фазе(◦) |
|
0.08 |
0.21 |
15 |
20 |
21 |
54 |
|
0.096 |
0.26 |
18.9 |
18 |
24.4 |
50 |
|
0.12 |
0.31 |
23.8 |
15 |
25.6 |
48 |
|
0.064 |
0.16 |
12.6 |
23.9 |
20 |
55 |
|
0.04 |
0.18 |
11 |
34 |
16.33 |
55 |
|
Ку |
Трег(с) |
Перерегулирование(%) |
Wср(рад/с) |
Запас по амплитуде(дБ) |
Запас по фазе(◦) |
|
200 |
0.21 |
15 |
20 |
21 |
54 |
|
240 |
0.19 |
19.9 |
22.6 |
21.3 |
50 |
|
300 |
0.16 |
25.5 |
27 |
19 |
43 |
|
160 |
0.25 |
11 |
16.6 |
23 |
59 |
|
100 |
0.4 |
5.6 |
11 |
27 |
67 |
Как видно из полученных данных система достаточно устойчива к вариациям параметров системы, так как время регулирования примерно одинаково во всех случаях(0.16-0.4).
Перерегулирование (5-30)
Во всех случаях получили устойчивую систему, значит наша цепь малочувствительна.
Цифровая реализация алгоритмов управления.